一種基于虛擬參考站的GNSS滑坡地質災害監測與分析方法與流程
本發明涉及遙感災害識別,具體涉及一種基于虛擬參考站的gnss滑坡地質災害監測與分析方法。
背景技術:
1、滑坡地質災害監測主要采用群測群防和專業監測,在專業監測方面,主要以全球衛星導航系統gnss技術和傳感器技術,如裂縫計、拉力計、雨量計等為主。gnss技術具有全天候、高精度、自動化、無需通視等優勢,基線解算相對精度可達10-9,成為滑坡監測預警的重要技術手段。
2、目前gnss滑坡監測主要采用“1+n”模式,即1個基準站和n個監測站,通過解算地質穩定區內參考站(基準站)與滑坡體內監測站間的基線,獲取滑坡體的位移。“1+n”模式需要在每個監測區域附近建設至少1個參考站,存在建設成本高、選址困難、基準不穩定、資源浪費等問題。
技術實現思路
1、本發明所要解決的技術問題是提供一種基于虛擬參考站的gnss滑坡地質災害監測與分析方法,解決目前gnss滑坡監測建設成本高、選址困難、基準不穩定、資源浪費等問題。
2、為解決上述技術問題,本發明所采用的技術方案是:
3、一種基于虛擬參考站的gnss滑坡地質災害監測與分析方法,包括以下步驟:
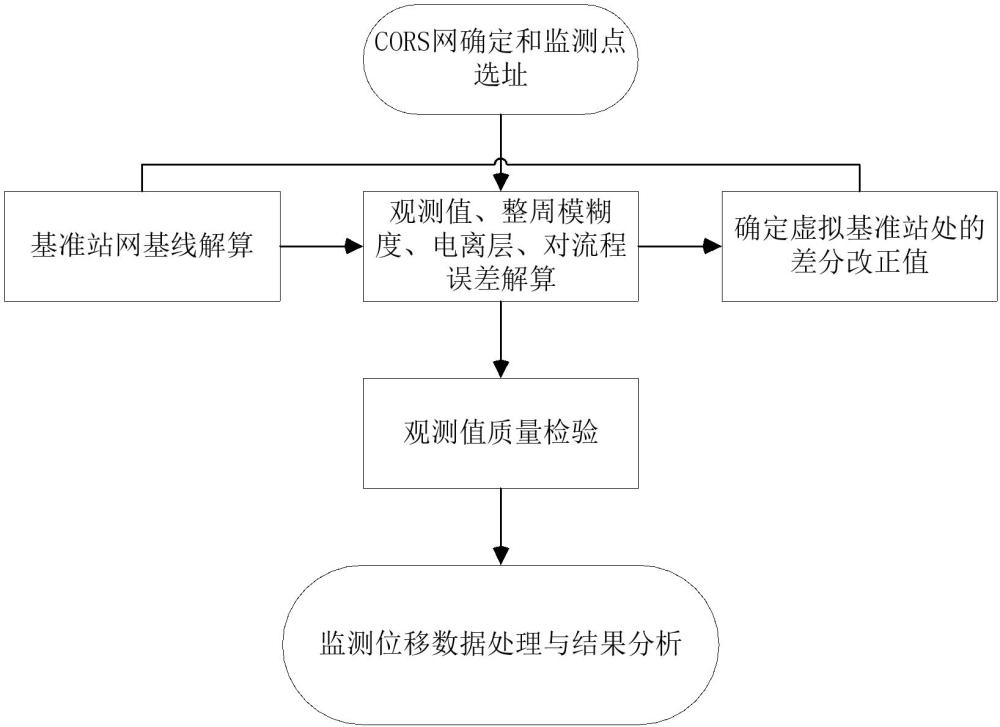
4、step1、cors的網絡確定與監測點選址;包括確定工程區域的cors網絡覆蓋情況,并在cors覆蓋區域選擇需要監測的滑坡特征監測點,進行監測設備的安裝,cors即連續運行參考站continuously?operating?reference?stations;
5、step2、多系統虛擬基準站網解算;基于虛擬參考站virtual?reference?station,vrs進行滑坡監測的關鍵是在監測點附近生成有效的vrs,將vrs與監測點進行短基線解算,獲得監測點的虛擬觀測值;
6、step3、虛擬觀測值質量檢驗;采用物理參考站數據對vrs獲取的虛擬觀測值質量進行檢驗和評估;
7、step4、數據處理與結果分析;解算不同時長的監測數據,統計計算精度,對北?n、東?e、天頂?u方向上解算結果的精度進行統計評估。
8、上述的step1中,cors的網絡確定與監測點選址,包括確定工程區域的cors網絡覆蓋區域確定,滑坡特征監測點選址確定。
9、上述的step2中,虛擬基準站觀測值的解算方法,包括三個部分,其一,對cors網中的基線進行解算,固定雙差整周模糊度;其二,利用每條基線的北斗觀測值、雙差整周模糊度、精確的基準站位置坐標計算每條基線的電離層延遲、對流層延遲及綜合誤差;其三,根據虛擬基準站坐標,插值確定虛擬基準站處的差分改正信息,為地質災害監測終端提供實時虛擬基準服務。
10、上述的虛擬基準站觀測值的解算中的整周模糊度解算過程為:
11、1)通過載波相位觀測值和p碼偽距組成melbourne-wübbena組合,即m-w組合,計算得到寬巷整周模糊度,具體公式如下:
12、;
13、式中,上標p、q為觀測衛星p和參考衛星q的標識,下標為gnss寬巷組合觀測值,下標i、j為基準站i、j的標識,λ為載波波長,和分別為gnss觀測值的第一頻點l1和第二頻點l2頻率,為雙差算子, n為整周模糊度, p為偽距觀測值,為載波相位觀測值;
14、2)將載波相位和偽距觀測值進行無電離層組合,解算得到無電離層模糊度的實數解,觀測方程如下:
15、;
16、式中,為測站到衛星的距離, trop為對流層延遲誤差,為載波相位觀測值噪聲,為偽距觀測值噪聲;
17、其中,由于glonass采用頻分多址的信號結構,導致glonass雙差模糊度在以距離為單位的雙差觀測方程中,其雙差模糊度不為整數,需將其變換為一個雙差整周模糊度和一個單差整周模糊度,故觀測方程如下:
18、;
19、式中,、、、分別glonass觀測值的波長、相位觀測值、偽距觀測值和整周模糊度, p為觀測衛星, q為參考衛星;
20、3)利用步驟1)解算的寬巷整周模糊度和步驟2)解算的無電離層模糊度實數解和相應的方差協方差陣得到窄巷模糊度的實數解和對應的方差協方差陣,并使用最小二乘降相關平差算法lambda固定窄巷整周相位模糊度,進而計算得到gnss衛星l1、l2整周相位模糊度。
21、上述的電離層延遲、對流層延遲及綜合誤差的計算過程為:
22、在計算多系統虛擬基準站誤差時,將誤差分成電離層延遲、對流層延遲和包含二階電離層延遲、軌道誤差、多路徑誤差等的綜合誤差并分別進行計算;在固定各基線的整周模糊度后,即可以根據每條基線的gnss觀測值、雙差整周模糊度、精確的基準站位置坐標等計算得到以上三種誤差,具體公式如下:
23、;
24、式中,雙差電離層延遲,是l1頻點的載波觀測值,是l2頻點的載波觀測值, mf為對流層映射函數; zwd為對流層濕延遲; zhd為對流層靜力學延遲;other為綜合誤差;和為l1和l2觀測值的波長,和為l1和l2觀測值的整周模糊度,為觀測值的高度角,為雙差算子,下標h和w分別代表對流層干延遲和濕延遲,下標n和m分別代表基準站和監測站,上標s和k分別代表參考衛星和觀測衛星。
25、上述的根據虛擬基準站坐標,插值確定虛擬基準站處的差分改正信息的具體過程為:
26、對于多系統虛擬基準站網的監測終端而言,能否實現實時精確定位的關鍵是與距離相關的誤差能否準確得到;由于電離層延遲誤差、對流層延遲誤差和綜合誤差具有較強時空相關性,而流動站和基準站在垂直方向上的距離相較于水平距離要小得多,故采用反距離加權法按基線東、北方向矢量分別內插流動站的電離層延遲誤差、對流層延遲誤差及綜合誤差共計三種誤差;其中,東、北方向矢量對應內插系數、的觀測方差如下:
27、;
28、式中,l為觀測值矩陣,b為設計矩陣,x為待估參數矩陣,△為殘差矩陣,其中,觀測方程的權陣p:
29、;
30、;
31、;
32、;
33、、為基線1的站心坐標系各點到參考點的東方向、北方向距離,、為基線2的站心坐標系各點到參考點的東方向、北方向距離,、為基線的站心坐標系各點到參考點的東方向、北方向距離;
34、按最小二乘原理即可求解得到東、北方向矢量對應的內插系數、;再按下式內插流動站的誤差:
35、;
36、式中, err為基線誤差,、為基線東、北方向矢量, d為基線長,、為東、北方向矢量對應的內插系數,、、分別為流動站的內插誤差、流動站到主站基線的東、北方向矢量。
37、上述的step3中,虛擬觀測值質量檢驗。采用物理參考站數據對vrs的觀測值質量進行檢驗和評估。包含三個環節:首先選定同名監測點,并確定檢驗指標,然后利用gnss預處理軟件anubis對同名監測vrs站和物理參考站數據分別進行預處理及質量檢驗,最終統計分析兩種監測模式各指標的數據質量,評判數據vrs數據質量。
38、上述選定同名監測點,并確定檢驗指標。確定好同名監測點vrs?數據和物理參考站數的質量檢驗指標,檢驗指標包括信噪比?snr、多路徑效應、周跳比。
39、方法還包括對同名監測vrs站和物理參考站數據分別進行預處理及質量檢驗標;具體的用用gnss預處理軟件anubis同名監測點vrs?數據和物理參考站觀測數據進行處理、確定質量檢驗指標數值。
40、方法還包括統計分析并評判數據vrs數據質量;對同名監測vrs站和物理參考站的信噪比?snr、多路徑效應、周跳比等質量檢驗標數值進行對比分析,評判vrs解算數據的可行性、確定數據質量。
41、本發明提供的一種基于虛擬參考站的gnss滑坡地質災害監測與分析方法,使用基于虛擬參考站vrs的滑坡地質災害監測方法,利用衛星導航定?位連續運行參考站cors在監測區生成虛擬參考站數據,代替物理參考站進行滑坡監測,為了減少gnss滑坡監測的成本;同時,vrs不受地質條件和距離約束,滿足滑坡監測大范圍、普適性、場景復雜的要求。
- 還沒有人留言評論。精彩留言會獲得點贊!