基于衛星定位和通信數傳的移動目標監控系統的制作方法
本技術涉及衛星定位和通信,具體地,涉及一種基于衛星定位和通信數傳的移動目標監控系統。
背景技術:
1、衛星定位技術基于北斗衛星、gps、glonass、galileo等系統,以全球覆蓋、全天候高精度定位的特點,成為移動目標監控的核心技術之一。通過衛星定位和通信數傳技術,能夠獲取監控目標的位置信息,以保證在沒有網絡覆蓋的區域也能精確獲得監控目標的移動情況,進而能為偏遠地區或網絡信號較差區域的戶外工作者、緊急救援行動等提供技術支持。
2、傳統的移動目標監控方法通常采用固定時間間隔的位置更新機制,即利用定位衛星按照預設的時間間隔向智能設備,如gps模塊發送位置信息。這種方法在移動目標速度較為穩定且分布集中的場景下尚能滿足需求,但在移動目標速度變化大、分布廣泛的情況下,則存在明顯的局限性。一方面,對于快速移動的目標,固定時間間隔可能無法及時捕捉到其位置變化,導致監控精度下降;另一方面,對于慢速或靜止的目標,頻繁的位置更新則會造成不必要的資源浪費。
3、因此,需要一種優化的基于衛星定位和通信數傳的移動目標監控方法以解決上述技術問題。
技術實現思路
1、提供該
技術實現要素:
部分以便以簡要的形式介紹構思,這些構思將在后面的具體實施方式部分被詳細描述。該發明內容部分并不旨在標識要求保護的技術方案的關鍵特征或必要特征,也不旨在用于限制所要求的保護的技術方案的范圍。
2、本技術提供了一種基于衛星定位和通信數傳的移動目標監控系統,所述系統包括:
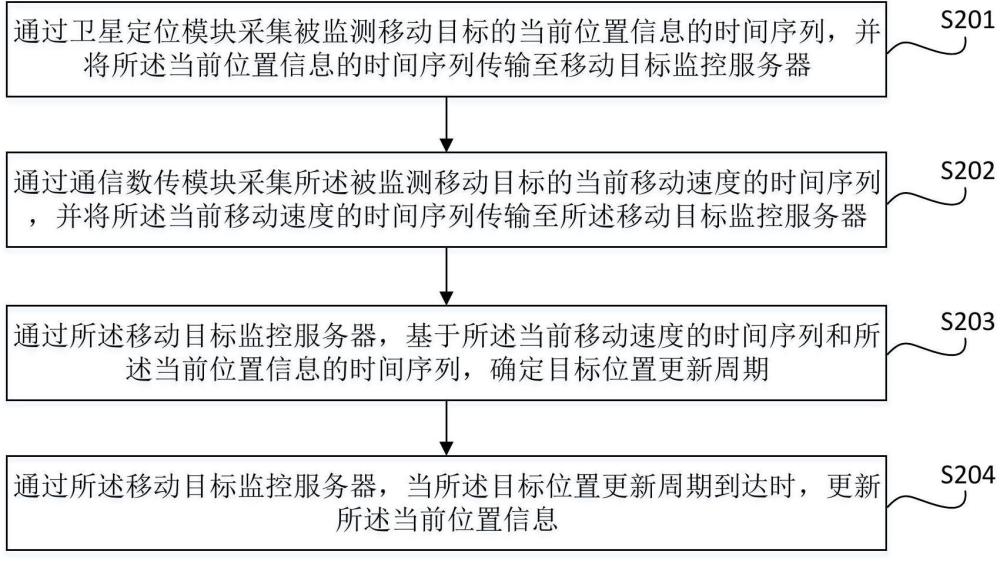
3、移動目標位置監測模塊,用于通過衛星定位模塊采集被監測移動目標的當前位置信息的時間序列,并將所述當前位置信息的時間序列傳輸至移動目標監控服務器;
4、移動目標速度監測模塊,用于通過通信數傳模塊采集所述被監測移動目標的當前移動速度的時間序列,并將所述當前移動速度的時間序列傳輸至所述移動目標監控服務器;
5、更新周期確定模塊,用于通過所述移動目標監控服務器,基于所述當前移動速度的時間序列和所述當前位置信息的時間序列,確定出目標位置更新周期;
6、位置更新模塊,用于通過所述移動目標監控服務器,當所述目標位置更新周期到達時,更新所述當前位置信息。
7、可選地,所述更新周期確定模塊,包括:數據時序特征提取單元,用于分別對所述當前移動速度的時間序列和所述當前位置信息的時間序列進行時序編碼以得到移動速度時序關聯特征向量的序列和位置信息時序關聯特征向量的序列;特征前向傳播聚合單元,用于將所述移動速度時序關聯特征向量的序列和所述位置信息時序關聯特征向量的序列分別進行特征前向傳播聚合以得到移動速度時序傳播聚合表示向量和位置信息時序傳播聚合表示向量;多模態信息關聯融合分析單元,用于對所述移動速度時序傳播聚合表示向量和所述位置信息時序傳播聚合表示向量進行關聯掩碼注意力融合以得到靜態-動態多模態對象狀態融合表示向量;更新周期解碼生成單元,用于基于所述靜態-動態多模態對象狀態融合表示向量,生成所述目標位置更新周期的解碼值。
8、可選地,所述數據時序特征提取單元,用于:將所述當前移動速度的時間序列和所述當前位置信息的時間序列分別輸入基于bi-lstm模型的序列編碼器以得到所述移動速度時序關聯特征向量的序列和所述位置信息時序關聯特征向量的序列。
9、可選地,所述特征前向傳播聚合單元,用于:將所述移動速度時序關聯特征向量的序列和所述位置信息時序關聯特征向量的序列輸入基于節點能量顯著時序衰減的特征前向傳播網絡以得到所述移動速度時序傳播聚合表示向量和所述位置信息時序傳播聚合表示向量。
10、可選地,所述特征前向傳播聚合單元,包括:能量顯著描述符計算子單元,用于基于所述移動速度時序關聯特征向量的序列中的各個移動速度時序關聯特征向量的均值和方差,計算所述各個移動速度時序關聯特征向量的能量顯著描述符以得到能量顯著描述符的時間序列;時間戳標記子單元,用于提取所述移動速度時序關聯特征向量的序列中的各個移動速度時序關聯特征向量的時間戳以得到時間戳的時間序列;歷史節點特征劃分子單元,用于將所述移動速度時序關聯特征向量的序列中的當前時間點對應的移動速度時序關聯特征向量作為當前移動速度時序關聯特征向量,且將其他時間點對應的移動速度時序關聯特征向量作為歷史移動速度時序關聯特征向量,以得到當前移動速度時序關聯特征向量和歷史移動速度時序關聯特征向量的序列;衰減因子計算子單元,用于計算所述歷史移動速度時序關聯特征向量的序列中的各個歷史移動速度時序關聯特征向量相對于所述當前移動速度時序關聯特征向量的能量時間衰減因子以得到能量時間衰減因子的時間序列;歷史節點傳播聚合子單元,用于以所述能量顯著描述符的時間序列作為正向調節因子且以所述能量時間衰減因子的時間序列作為反向調節因子,對所述歷史移動速度時序關聯特征向量的序列進行時序傳播聚合以得到歷史節點移動速度時序聚合特征向量;全局時序聚合子單元,用于融合所述歷史節點移動速度時序聚合特征向量和所述當前移動速度時序關聯特征向量以得到所述移動速度時序傳播聚合表示向量。
11、可選地,所述能量顯著描述符計算子單元,用于:計算所述移動速度時序關聯特征向量中的各個特征值與其特征均值的差值四次方的期望值,并將所述期望值除以所述移動速度時序關聯特征向量的特征方差的平方以得到所述能量顯著描述符。
12、可選地,所述衰減因子計算子單元,用于:計算所述歷史移動速度時序關聯特征向量與所述當前移動速度時序關聯特征向量之間的時間戳差值;對所述時間戳差值向下取整后除以預設時間衰減周期再進行平方運算,并將平方結果與預設衰減速率相乘以得到初始能量衰減系數;計算以自然常數為底,以所述初始能量衰減系數為指數的指數函數值,以得到所述能量時間衰減因子。
13、可選地,所述多模態信息關聯融合分析單元,用于:將所述移動速度時序傳播聚合表示向量和所述位置信息時序傳播聚合表示向量輸入特征值關聯掩碼引導的可區分注意力融合模塊以得到所述靜態-動態多模態對象狀態融合表示向量。
14、可選地,所述多模態信息關聯融合分析單元,包括:全域特征值關聯矩陣計算子單元,用于計算所述移動速度時序傳播聚合表示向量和所述位置信息時序傳播聚合表示向量之間的全域特征值關聯矩陣;門控函數計算子單元,用于將所述全域特征值關聯矩陣輸入可學習的門控函數以得到相關性可區分權重矩陣;聚合表示向量計算子單元,用于以所述相關性可區分權重矩陣作為融合掩碼矩陣,分別計算所述移動速度時序傳播聚合表示向量、所述位置信息時序傳播聚合表示向量與所述融合掩碼矩陣之間的矩陣乘積以得到區分強化移動速度時序傳播聚合表示向量和區分強化位置信息時序傳播聚合表示向量;向量融合子單元,用于融合所述區分強化移動速度時序傳播聚合表示向量和所述區分強化位置信息時序傳播聚合表示向量以得到所述靜態-動態多模態對象狀態融合表示向量。
15、可選地,所述更新周期解碼生成單元,用于:將所述靜態-動態多模態對象狀態融合表示向量輸入基于解碼器的目標位置更新周期估計模塊以得到所述目標位置更新周期的解碼值。
16、本技術至少具有如下技術效果:與現有技術相比,本技術通過采用基于深度學習的人工智能技術對移動目標的位置信息和移動速度進行數據分析,分別挖掘出移動目標的位置和移動速度的時序變化規律,進而通過對兩者進行細粒度的特征關聯融合,以獲取多模態的移動目標狀態信息,從而智能估計移動目標的下一位置更新周期,在更新周期到達時,自動更新移動目標的當前位置信息。通過這種方式,可以在確保監控精度的同時,減少不必要的通信和數據傳輸,從而優化資源使用,降低定位過程中的功耗,提高定位服務的能效比和精度。
17、本技術的其他特征和優點將在隨后的具體實施方式部分予以詳細說明。
- 還沒有人留言評論。精彩留言會獲得點贊!