一種建筑施工用測量裝置及其方法與流程
本發明涉及測量,尤其涉及一種建筑施工用測量裝置及其方法。
背景技術:
1、我國是一個建筑大國,建筑保有量巨大,其中不乏帶裂縫工作的建筑。裂縫對建筑物的安全性、耐久性有著至關重要的影響。建筑裂縫主要存在于混凝土上,混凝土裂縫可分為微觀裂縫及宏觀裂縫,微觀裂縫對結構本身基本無影響,大多數混凝土都是帶微小裂縫工作的。混凝土宏觀裂縫即混凝土裂縫,其寬度若超出規范對裂縫控制的計算范圍,則可被視為有害裂縫,會給結構物帶來安全隱患,可能導致安全事故的發生,故裂縫檢測一直受到國內學者的廣泛關注。
2、目前混凝土裂縫寬度檢測主要采用以下幾種方法:第一,塞尺或裂縫寬度比對卡測量;第二,使用裂縫顯微鏡并配光源進行測量;第三,使用裂縫寬度測試儀,將裂縫圖像顯示在顯示屏上并采用人工讀取寬度的方法測量。
3、現有裂縫寬度檢測方法,其缺點主要表現在:其一,相關儀器費用高昂,不經濟,同時儀器裝置操作復雜,需要專業人員進行操作;其二,上述檢測方法均需要人工操作,人工觀測混凝土結構裂縫有一定主觀性,包括儀器精度問題,造成裂縫檢測數據準確性不高。
技術實現思路
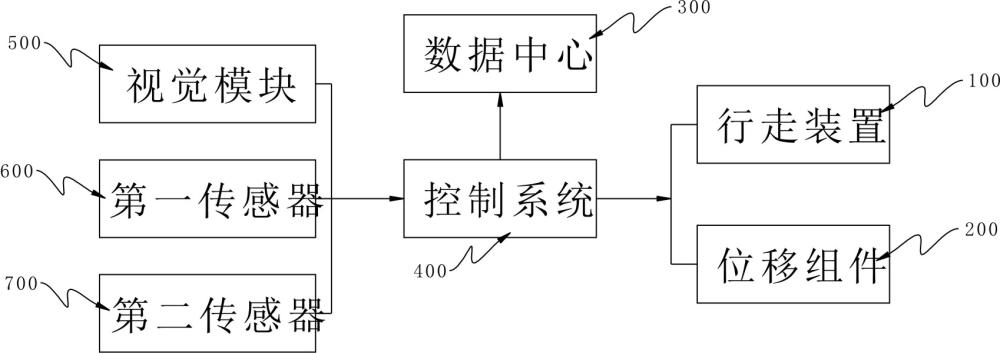
1、因此,為了解決上述不足,一方面,本發明在此提供一種建筑施工用測量裝置,包括:
2、視覺模塊,用于采集目標表面圖像;
3、控制系統,獲取目標表面圖像,框選目標表面圖像的目標特征,提取目標特征邊緣以及裂縫骨架線,根據裂縫骨架線計算骨架線法向量,基于骨架線法向量與目標特征邊緣計算裂縫寬度;
4、所述控制系統包括:
5、信息采集單元,用于獲取視覺模塊采集的目標表面圖像;
6、圖像處理單元,框選目標表面圖像中的目標特征,形成目標特征框選區域,提取目標特征框選區域中目標特征邊緣以及裂縫骨架線;
7、寬度計算單元,根據裂縫骨架線計算骨架線法向量,基于骨架法向量與目標特征邊緣計算裂縫寬度。
8、本發明通過獲取視覺模塊采集的目標表面圖像;框選目標表面圖像中的目標特征,形成目標特征框選區域,提取目標特征框選區域中目標特征邊緣以及裂縫骨架線;根據裂縫骨架線計算骨架線法向量,基于骨架法向量與目標特征邊緣計算裂縫寬度,從而實現墻面、混凝土構件或其他建筑結構平面裂縫寬度的自動化測量,操作簡單,測量數據準確。
9、進一步的,所述測量裝置還包括行走裝置,上述的控制系統與視覺模塊搭載在該行走裝置上,通過所述行走裝置帶動整個測量裝置在地面上運動。
10、通過行走裝置帶動整個裝置運動,可在當前區域測量工作完成后,自動運動到下一測量區域,實現測量工作的自動化。
11、進一步的,所述測量裝置還包括位移組件,該位移組件整體安裝在行走裝置上,上述的視覺模塊安裝在位移組件上,通過位移組件帶動視覺模塊線性運動;
12、所述位移組件包括升降結構,通過該升降結構帶動所述視覺模塊豎直線性運動;
13、所述升降結構包括:
14、第二動力裝置;
15、固定柱,固定柱固定安裝在行走裝置上;
16、活動柱,該活動柱包裹在固定柱外側,通過第二動力裝置帶動活動柱豎直運動;
17、安裝平臺,所述安裝平臺安裝在活動柱上,隨活動柱一同豎直線性運動,所述視覺模塊安裝在該安裝平臺上。
18、通過第二動力裝置帶動整個安裝平臺豎直運動,從而帶動視覺模塊豎直線性運動,從而提高視覺模塊的作用高度上限。
19、進一步的,所述安裝平臺一側設有第一傳感器,該第一傳感器用于檢測安裝平臺側面兩端到目標表面的第一距離;
20、該測量裝置還包括姿態控制單元,與信息采集單元連接,根據第一距離進行平行判斷,獲得平行判斷結果,若不平行,則控制行走裝置運動,調整裝置與目標表面的平行度。
21、通過姿態控制單元,根據第一距離進行平行判斷,獲得平行判斷結果,若不平行,則控制行走裝置運動,調整裝置與目標表面的平行度,從而保持安裝平臺側面與目標表面平行,進而提高測量精度。
22、進一步的,所述升降結構還包括第一動力裝置,通過第一動力裝置帶動安裝平臺沿活動柱豎直線性運動。
23、通過第一動力裝置帶動安裝平臺相對于活動柱線性運動,從而增加視覺模塊的作用高度下限,配合上述第二動力裝置,增加了視覺模塊作用高度范圍。
24、進一步的,所述位移組件還包括行進裝置,該行進裝置安裝在安裝平臺上,所述視覺模塊安裝在行進裝置上;
25、所述行進裝置包括:
26、第五動力裝置,通過該第五動力裝置帶動視覺模塊相對于安裝平臺豎直滑動;
27、第四動力裝置,通過該第四動力裝置帶動視覺模塊水平橫向線性運動;
28、第三動力裝置,通過該第三動力裝置帶動視覺模塊水平縱向線性運動。
29、進一步的,在上述視覺模塊上設有第二傳感器,通過該第二傳感器獲取視覺模塊與目標表面的第二距離;
30、該測量裝置還包括工作控制單元,與信息采集單元連接,用于根據第二距離進行間距判斷,根據間距判斷結果控制行進裝置執行動作。
31、通過行進裝置帶動視覺模塊靠近目標表面,在此過程中,第二傳感器獲取視覺模塊與目標表面的第二距離;工作控制單元根據第二距離進行間距判斷,若第二距離等于預設距離,則控制第三動力裝置停止工作,隨后控制第四動力裝置帶動視覺模塊橫向運動,運動到最后行程后,第五動力裝置帶動視覺模塊上升預設高度,第四動力裝置帶動視覺模塊反向運動,往復如此,直至上升到極限高度或目標表面的最大高度。
32、另一方面,本發明還提供了一種建筑施工用測量方法,所述測量方法使用了上述的建筑施工用測量裝置,所述測量方法包括:
33、通過遙控、推動或遠程操控的方式控制裝置運動到目標的初始測量位置;
34、根據第一距離進行平行判斷,獲得平行判斷結果,若不平行,則控制行走裝置運動,調整裝置與目標表面的平行度;
35、具體的,信息采集單元分別獲取位于安裝平臺側面兩端的第一傳感器采集的第一距離 l 1、 l 2上傳到姿態控制單元中,姿態控制單元對 l 1、 l 2進行判斷,判斷 l 1是否等于 l 2,若不等于,則控制行走裝置運動,調整角度,直至 l 1、 l 2相等;
36、若平行,則控制行走裝置沿平行于目標表面的方向運動,行走至目標表面中,以獲取目標測量工作長度;
37、其方式是:通過光量判別的方式,當第三傳感器預設距離位置存在目標時,光量被反射接收,開始累加,直至檢測不到目標或第四傳感器檢測到障礙物相距裝置的距離達到危險距離;
38、所述目標測量工作長度的計算方式為:
39、
40、其中, l為測量工作長度,單位為 m; v為裝置測量目標的測量工作長度時行走速度,單位為 m/s; t為裝置從初始位置到檢測不到目標時或第四傳感器檢測到障礙物相距裝置的距離達到危險距離所用的時間,單位為 s; a為障礙物相距裝置的危險距離,當無障礙物時, a取0,單位為 m;
41、測量完成后,回到初始位置,行進裝置帶動視覺模塊靠近目標表面,在此過程中,第二傳感器獲取視覺模塊與目標表面的第二距離;
42、工作控制單元根據第二距離進行間距判斷,若第二距離等于預設距離,則控制第三動力裝置停止工作;
43、隨后控制第四動力裝置帶動視覺模塊橫向運動,運動到最后行程后,第五動力裝置帶動視覺模塊上升預設高度,第四動力裝置帶動視覺模塊反向運動,往復如此,直至上升到極限高度或目標表面的最大高度,在此過程中視覺模塊對目標表面進行裂縫測量工作;
44、所述裂縫測量工作包括:
45、獲取視覺模塊采集的目標表面圖像;
46、框選目標表面圖像中的目標特征,形成目標特征框選區域,提取目標特征框選區域中目標特征邊緣以及裂縫骨架線;
47、根據裂縫骨架線計算骨架線法向量,基于骨架法向量與目標特征邊緣計算裂縫寬度;
48、所述提取目標特征框選區域中目標特征邊緣以及裂縫骨架線包括:
49、采用faster?r-cnn?和yolo?v5(x)目標檢測網絡模型對橋梁裂縫進行初次識別和提取;
50、采用主干特征提取網絡為resnet50的目標檢測網絡模型faster?r-cnn?和主干特征提取網絡為cspdarknet53?的目標檢測網絡模型yolo?v5(x),在tensorflow2框架下進行橋梁裂縫的二次識別和提取;
51、在pytorch框架下,采用主干特征提取網絡為vgg16?的u-net?語義分割網絡模型進行裂縫的分割和提取;
52、通過alpha?shapes?算法提取裂縫邊緣,形成裂縫邊緣線;通過中軸變換迭代計算提取裂縫骨架線;
53、所述基于骨架法向量與目標特征邊緣計算裂縫寬度包括:
54、確定骨架法向量與目標特征邊緣線的交叉點;
55、獲取交叉點坐標,基于交叉點坐標計算裂縫寬度,獲得裂縫寬度計算結果;
56、所述基于骨架法向量與目標特征邊緣計算裂縫寬度包括:
57、確定骨架法向量與目標特征邊緣線的交叉點;
58、獲取交叉點坐標,基于交叉點坐標計算裂縫寬度,獲得裂縫寬度計算結果;
59、所述裂縫寬度的計算方式為:
60、
61、其中, h為裂縫骨架線上預設點的裂縫寬度,單位為 mm; x 1、 x 2為骨架法向量與目標特征邊緣線交叉點的橫坐標, y 1、 y 2為骨架法向量與目標特征邊緣線交叉點的縱坐標;
62、所述骨架法向量的計算方式為采用svd?奇異分解對骨架線進行法向量估計,從而獲得骨架法向量;
63、在上述測量過程中,信息采集單元獲取測量工作長度,工作控制單元根據測量工作長度計算剩余測量工作長度,基于剩余測量工作長度控制行走裝置與位移組件行程;
64、所述剩余測量工作長度的計算方式為:
65、
66、其中, c為剩余測量工作長度,單位為 m; l為測量工作長度,單位為 m; n為裝置在測量過程中行走的次數; x為每次行走的長度,單位為 m;
67、當目前區域的測量工作完成后,若 c大于 x,則控制裝置的行走裝置行走距離 x,隨后繼續測量工作,位移組件帶動視覺模塊沿平行于目標特征的水平方向運動 x長度;若 c小于 x,則控制裝置的行走裝置行走距離 x,同時在測量時,位移組件帶動視覺模塊沿平行于目標特征的水平方向運動 c長度,若目標特征端部具有障礙物,即行走裝置端部的第四傳感器檢測到障礙物時,工作控制單元則控制行走裝置行走 c長度,控制位移組件帶動視覺模塊沿平行于目標特征的水平方向運動 x- c長度,使其運動到當前區域的初始位置( x- c,0),隨后開始測量,此后每次上升預設高度后,都會以該點的橫坐標 x- c為初始橫坐標或終點橫坐標。
68、本發明具有如下優點:
69、本發明通過獲取視覺模塊采集的目標表面圖像;框選目標表面圖像中的目標特征,形成目標特征框選區域,提取目標特征框選區域中目標特征邊緣以及裂縫骨架線;根據裂縫骨架線計算骨架線法向量,基于骨架法向量與目標特征邊緣計算裂縫寬度,從而實現墻面、混凝土構件或其他建筑結構平面裂縫寬度的自動化測量,操作簡單,測量數據準確。
70、通過行走裝置帶動整個裝置運動,可在當前區域測量工作完成后,自動運動到下一測量區域,實現測量工作的自動化。
71、通過第二動力裝置帶動整個安裝平臺豎直運動,從而帶動視覺模塊豎直線性運動,從而提高視覺模塊的作用高度上限。通過第一動力裝置帶動安裝平臺相對于活動柱線性運動,從而增加視覺模塊的作用高度下限,配合上述第二動力裝置,增加了視覺模塊作用高度范圍。
72、通過姿態控制單元,根據第一距離進行平行判斷,獲得平行判斷結果,若不平行,則控制行走裝置運動,調整裝置與目標表面的平行度,從而保持安裝平臺側面與目標表面平行,進而提高測量精度。
73、通過行進裝置帶動視覺模塊靠近目標表面,在此過程中,第二傳感器獲取視覺模塊與目標表面的第二距離;工作控制單元根據第二距離進行間距判斷,若第二距離等于預設距離,則控制第三動力裝置停止工作,隨后控制第四動力裝置帶動視覺模塊橫向運動,運動到最后行程后,第五動力裝置帶動視覺模塊上升預設高度,第四動力裝置帶動視覺模塊反向運動,往復如此,直至上升到極限高度或目標表面的最大高度。
- 還沒有人留言評論。精彩留言會獲得點贊!