基于計算機視覺的激光標線儀標定系統
本發明涉及計算機視覺,具體為基于計算機視覺的激光標線儀標定系統。
背景技術:
1、激光標線儀是一種可以提供水平和鉛垂標線的激光儀器。該儀器適用于多種工業工作環境,具有高抗干擾性、高穩定性的特點。在實際工業使用中,由于儀器加工及裝配的影響,激光標線儀的激光出射平面相較標準水平面或鉛垂面存在偏離,影響儀器精度。常用的激光標線儀可以出射一條水平激光線,多條正交的垂直激光線,及下對點激光線。相應的,根據《激光標線儀校準規范》,激光標線儀誤差為六項,分別為:水平激光線誤差,水平激光線發射角誤差,水平激光線補償誤差,垂直激光線誤差,垂直激光線正交誤差,下對點誤差。傳統的激光標線儀誤差標定方法使用多個直角坐標板,進行人工讀數誤差計算。該方法有測量效率低、難度大、測量精度低、重復性誤差高等諸多缺點。因此,自動化的激光標線儀標定系統成為需要。
2、現有技術主要為坐標板人工讀數及專用激光數字接收靶進行激光線坐標識別,從而計算誤差。
3、人工讀數有以下缺點:
4、效率低:需人工逐個讀取坐標板讀數,并多次測量,最終手動計算誤差大小。
5、測量難度大:在測量垂直激光線誤差時,人工讀數可能需要攀爬至較高高度,對頂端坐標板進行讀數,安裝難度大,讀數難度大。
6、測量誤差大:激光在直角坐標靶上的對比度較差,同時,人工讀數時需保證不遮擋激光線,只能側視讀數,會產生較大誤差。
7、重復性差:不同的人在估讀直角坐標時差異較大,對于統一投線儀,重復性測量誤差較大。
8、激光數字接收靶有以下缺點:
9、成本高昂:激光數字接收靶采用線陣或面陣感光元件進行激光線位置識別,還需提前標定精確的零位,制造成本高昂。
10、安裝難度高:接收靶體積較大,在進行旋轉、調平等操作時,易導致位置偏離,安裝難度大。
11、為此,本領域技術人員提供基于計算機視覺的激光標線儀標定系統,以解決上述背景技術中提出的問題。
技術實現思路
1、針對現有技術的不足,本發明提供了基于計算機視覺的激光標線儀標定系統,解決了現有技術存在檢測標定效率較差的問題。
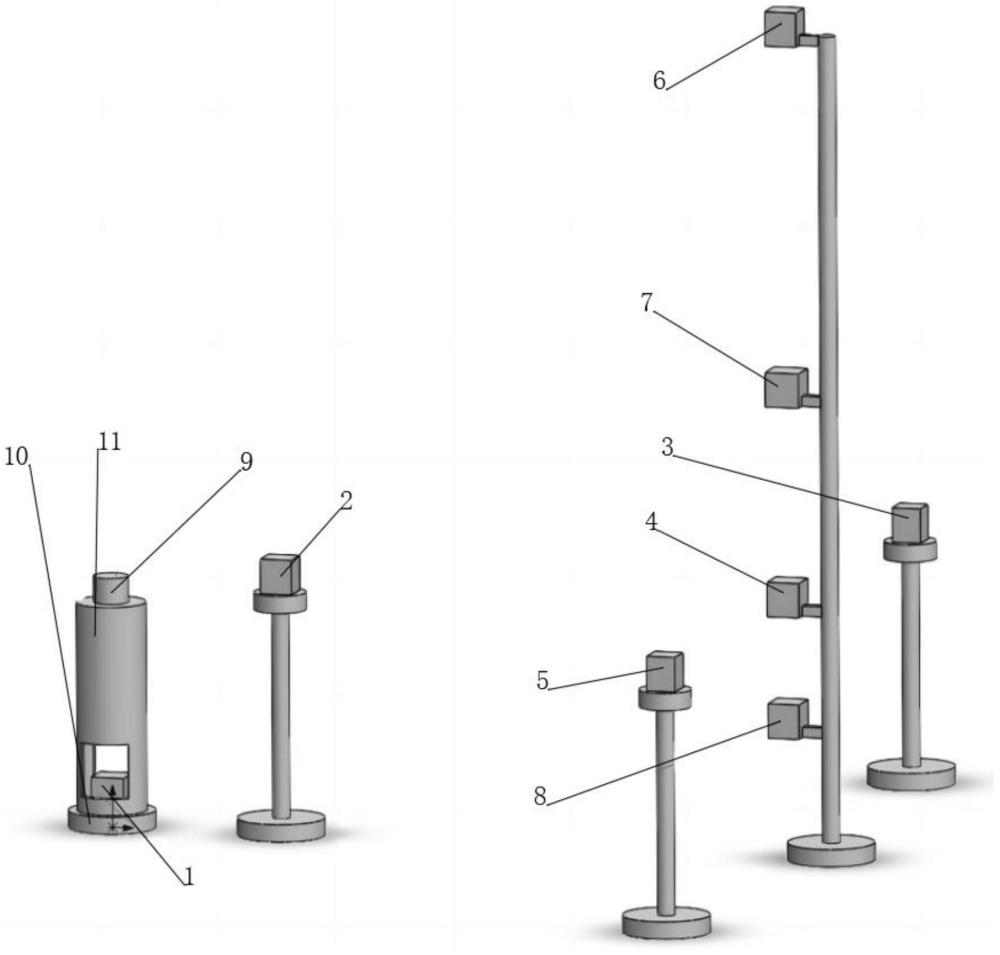
2、為實現以上目的,本發明通過以下技術方案予以實現:基于計算機視覺的激光標線儀標定系統,包括第1號接收靶、第2號接收靶、第3號接收靶、第4號接收靶、第5號接收靶、第6號接收靶、第7號接收靶、第8號接收靶、旋轉微傾臺、底座、升降臺;
3、所述第2號接收靶、第3號接收靶、第4號接收靶、第5號接收靶位于同一水平面,用于測量水平激光線誤差,水平激光線發射角誤差,水平激光線補償誤差及垂直激光線正交誤差;
4、所述第6號接收靶、第7號接收靶、第8號接收靶位于同一鉛垂線,用于測量垂直激光線誤差;
5、所述第1號接收靶位于升降臺軸心處,用于測量下對點誤差;
6、所述底座用于將整個臺子固定到地面;
7、所述旋轉微傾臺具有旋轉與微傾功能,用于放置激光標線儀;
8、所述升降臺用于調整水平激光線透射的高度。
9、優選的,所述旋轉微傾臺安裝在升降臺的頂部,所述升降臺固定連接在底座的頂部。
10、優選的,所述第1號接收靶、第2號接收靶、第3號接收靶、第4號接收靶、第5號接收靶、第6號接收靶、第7號接收靶、第8號接收靶均包括位移臺,所述位移臺的頂部設置有顯微相機,所述位移臺的頂部設置有顯微相機緊固機構,所述位移臺的一側設置有多個分劃板調節機構,所述分劃板調節機構的一側滑動連接有坐標分劃板。
11、優選的,所述坐標分劃板采用玻璃材質,并在同一側設置有刻度線、對線基準、白色油漆涂層。
12、基于計算機視覺的激光標線儀標定方法,根據基于計算機視覺的激光標線儀標定系統,包括以下步驟:
13、s1、將第1號接收靶、第2號接收靶、第3號接收靶、第4號接收靶、第5號接收靶、第6號接收靶、第7號接收靶、第8號接收靶分別安裝在相應位置,然后通過位移臺對接收靶進行微調,確保安裝位置在水平以及鉛垂位,并通過經緯儀對每個接收靶的刻度線進行調平,旋轉坐標分劃板確保刻度線水平;
14、s2、將處于第1號接收靶、第2號接收靶、第3號接收靶、第4號接收靶、第5號接收靶、第6號接收靶、第7號接收靶、第8號接收靶內的顯微相機通過電性連接與上位機通信,通過上位機計算多個接收靶中分劃板的像素當量,得到像素距離與實際距離的比例;
15、s3、利用旋轉微傾臺的旋轉與微傾功能并配合升降臺對打開狀態的激光標線儀進行角度和高度調整,確保激光線清晰投射在接收靶上;
16、s4、啟動上位機軟件,使用非局部均值濾波對圖像進行降噪處理;然后,進行圖像分割和ro?i(感興趣區域)劃分,分別標出坐標橫軸、縱軸及視野范圍內距離較遠的兩條坐標刻度線;
17、s5、長期使用后,若檢測結果出現異常,則重復進行s1、s2即可完成檢測維護。
18、優選的,所述s4包括以下細節步驟:
19、s41、對劃分出的ro?i區域進行直線提取和擬合,使用最大類間方差法進行二值化操作,并通過最小二乘法對刻度線區域進行直線擬合,得到最終的坐標橫軸和縱軸及相距較遠的兩條刻度線;
20、s42、計算線線交點、點線距離,得到像素距離和實際距離的比值,完成像素當量標定工作;
21、s43、使用高斯擬合算法對激光線進行擬合,計算激光線中心與坐標軸線的像素距離,首先,轉換激光線圖像至hsv顏色空間,提取綠色激光線目標并增強對比度,其計算式為:
22、v=max(r,g,b);
23、
24、
25、s44、剔除光斑并進行高斯擬合,得到激光線軸心的實際距離;
26、s45、利用前期計算的像素當量,結合圖像接收靶的距離,計算水平激光線誤差、水平激光線發射角誤差、水平激光線補償誤差、垂直激光線誤差、垂直激光線正交誤差、下對點誤差。
27、優選的,所述s43步驟中,使用h(35-77),s(43-255),v(46-255)范圍處理激光線圖像。
28、本發明提供了基于計算機視覺的激光標線儀標定系統。具備以下有益效果:
29、1、本發明通過計算機自動讀數,無需人工讀數和攀爬,極大地簡化了操作流程,減少了人為因素的影響,大幅提升了檢測效率。
30、2、本發明采用高精度圖像處理算法和高斯擬合算法,檢測分辨力可達0.02mm或更高,單次測量的實驗標準差達到0.03mm以下,有效提高了測量的精度和一致性,顯著降低了重復性誤差。
31、3、本發明設計了圖像接收靶標和多靶標系統結構,具有位置微調能力,降低了硬件安裝難度和精度要求,同時相比于高成本的激光數字接收靶,圖像接收靶標的設計成本更低,減少了整體系統成本。
32、4、本發明通過計算機視覺技術和自動化算法,系統實現了激光標線儀標定過程的高度自動化,減少了人工干預,提高了操作的便捷性和穩定性,確保了檢測結果的準確性和可靠性。
- 還沒有人留言評論。精彩留言會獲得點贊!