一種用于巖層橫向與縱向位移測量方法及系統
本發明涉及巖層橫向與縱向位移測量,具體涉及一種用于巖層橫向與縱向位移測量方法及系統。
背景技術:
1、在煤礦巷道的頂板巖層,橫向和縱向位移的產生常受到多種因素的綜合影響,這反映了巖層穩定性的復雜性和多樣性。地質構造是其中至關重要的因素之一。地質構造的復雜變化可能導致巖層內部應力分布的不均勻性,從而為位移的發生創造了條件。這種不均勻性可能在特定地質構造單元內或相鄰地質體之間產生不同程度的應力集中和釋放,引發巖層位移現象。采礦活動也是影響巖層位移的重要因素之一。在地下開挖和支護操作過程中,巖層受到了機械力學和工程活動的直接影響,從而可能引發巖層的位移。采礦活動所造成的地表和地下工程變形不僅僅影響了巖層的穩定性,還可能通過巖層之間的相互作用傳遞應力,進而導致巷道頂板巖層的橫向和縱向位移。地下水位的變化也是巖層位移的重要影響因素之一。地下水對巖層的孔隙水壓力和地下水位的變化可能會影響巖層的穩定性。尤其是在季節性或長期性的地下水位變化情況下,地下水對巖層的滲透和承載能力可能會產生顯著影響,加劇了巖層的變形和位移。
2、洞室作為礦山內的空間結構,其巖層位移情況同樣具有復雜性和多變性。與礦巷相比,洞室的形態和大小更加多樣化,因此巖層位移可能受到更多復雜因素的影響。除了地質構造和采礦活動外,洞室周圍的巖層還可能受到巖體結構、地質裂縫和斷層等因素的影響,這些因素進一步增加了洞室巖層的位移風險。
3、邊坡位移情況在露天開采煤礦中備受關注,這與地質構造、降雨侵蝕和人為開采等因素密切相關。邊坡巖層的橫向和縱向位移可能導致邊坡的不穩定和塌方,對礦山生產和周邊環境造成嚴重影響。因此,對于這些因素的綜合影響對煤礦巷道頂板巖層、洞室和邊坡的位移情況進行準確評估和監測,以確保礦山的安全生產和環境保護至關重要。
4、然而,現有測量方法難以滿足對精度、可靠性、實時性和安全性的高要求。因此,開發一種能夠準確、快速、安全地測量煤礦頂板巖層橫向位移的方法和系統,對于提高煤礦生產的安全性和效率具有重要意義。
5、在所述背景技術部分公開的上述信息僅用于加強對本公開的背景的理解,因此它可以包括不構成對本領域普通技術人員已知的現有技術的信息。
技術實現思路
1、本發明的目的是提供一種用于巖層橫向與縱向位移測量方法及系統,通過桿中的傾角傳感器和伸縮傳感器,反映監測設備在巖層中的傾角和長度變化,可以有效計算出巖層在縱向與橫向的運動位移,使用傾角傳感器來測量重力加速度在不同軸向上的數據,以反映物體在x、y和z軸上的角度,結合桿件長度及巖層中伸縮長度,通過將公式轉換成大地坐標系下的角度并計算各桿件中節點初始空間坐標,以監測設備的節點1為監測設備坐標原點構建大地坐標系,通過矢量累加獲得各節點相對節點1處的坐標,再通過運動前后坐標點即可計算各節點相對初始狀態的位移,通過前后獲取的累加后節點n處的坐標值,能夠準確計算該節點發生的位移情況及位移空間方向,通過比較不同時間點的坐標值,可以確定節點的位移量和位移方向,從而深入了解該處結構的變化和演化過程,以解決上述背景技術中的問題。
2、為了實現上述目的,本發明提供如下技術方案:一種用于巖層橫向與縱向位移測量方法,包括以下步驟:
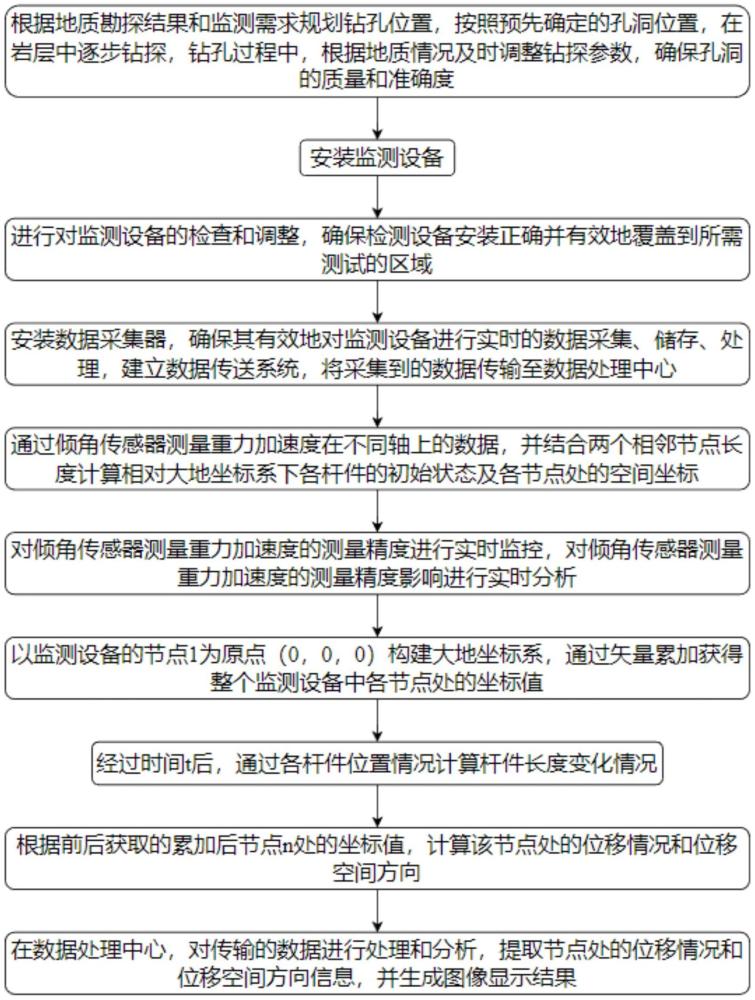
3、根據地質勘探結果和監測需求規劃鉆孔位置,按照預先確定的孔洞位置,在巖層中逐步鉆探,鉆孔過程中,根據地質情況及時調整鉆探參數,確保孔洞的質量和準確度;
4、安裝監測設備;
5、進行對監測設備的檢查和調整,確保檢測設備安裝正確并有效地覆蓋到所需測試的區域;
6、安裝數據采集器,確保其有效地對監測設備進行實時的數據采集、儲存、處理,建立數據傳送系統,將采集到的數據傳輸至數據處理中心;
7、通過傾角傳感器測量重力加速度在不同軸上的數據,并結合兩個相鄰節點長度計算相對大地坐標系下各桿件的初始狀態及各節點處的空間坐標;
8、對傾角傳感器測量重力加速度的測量精度進行實時監控,對傾角傳感器測量重力加速度的測量精度影響進行實時分析;
9、以監測設備的節點1為原點(0,0,0)構建大地坐標系,通過矢量累加獲得整個監測設備中各節點處的坐標值;
10、經過時間t后,通過各桿件位置情況計算桿件長度變化情況;
11、根據前后獲取的累加后節點n處的坐標值,計算該節點處的位移情況和位移空間方向;
12、在數據處理中心,對傳輸的數據進行處理和分析,提取節點處的位移情況和位移空間方向信息,并生成圖像顯示結果。
13、優選的,安裝監測設備的具體步驟如下:
14、操作人員將準備好的陣列式監測設備帶至現場,并準備好所需的測試桿和配件,其中傾角傳感器及伸縮傳感器使用rs485通訊線纜連接;
15、逐一將測試桿放入預制的孔洞中,確保監測設備準確覆蓋到需要測試的區域;
16、通過特定卡扣將測試桿固定在指定位置,并根據布局圖紙將測試桿按照特定排列方式安裝到孔洞中。
17、優選的,設定時間間隔g,基于時間間隔g記錄各桿件因巖層運動與x軸、y軸、z軸產生的傾斜角度,并將傾斜角度分別記為α、β、γ,以每根桿上端節點為原點,通過下式轉換成大地坐標系下的角度進行計算各桿件中桿末端節點大地坐標,因此節點n相對節點n-1的坐標系中表示為(lnx,lny,lnz),其中,rzyx=rz(γ)*ry(β)*rx(α),rzyx表示旋轉矩陣,用于計算坐標的變換,rx(α),ry(β),rz(γ):分別是繞x軸旋轉α角度,繞y軸旋轉β角度以及繞z軸旋轉γ角度的旋轉矩陣,每個旋轉矩陣都與一個特定的軸和角度相對應。
18、優選的,在監測系統中,(lnx,lny,lnz)表示的是從一個監測節點n-1到另一個節點n的三維空間位移,這些值是基于傾角傳感器測量的結果,用來計算節點n相對于節點n-1的空間位置,lnx=l*cos(β)*cos(α),lny=l*cos(β)*sin(α),lnz=l*sin(β);
19、結合上述公式得出:l表示兩個相鄰節點長度,lnx表示某桿件在x軸上的投影值,lny表示某桿件在y軸上的投影值,lnz表示某桿件在z軸上的投影值。
20、優選的,為了對傾角傳感器測量重力加速度的測量精度進行實時監控,獲取傾角傳感器測量重力加速度的噪聲水平指數、漂移指數、分辨率指數,將噪聲水平指數、漂移指數、分辨率指數進行綜合分析,生成影響指數,通過影響指數對傾角傳感器測量重力加速度的測量精度影響進行實時分析。
21、優選的,噪聲水平指數的計算公式為:其中,s(t)為在時間t的傳感器讀數,為這段時間內讀數的平均值,t是總時間,nli為噪聲水平指數;
22、漂移指數的計算公式為:其中,s(m)和s(0)分別是在時間m和開始時的傳感器讀數,漂移指數測量的是開始和結束時間的讀數差,di表示漂移指數,m表示時間點的總數;
23、分辨率指數的計算公式為:δs是能被傳感器檢測到的最小信號變化量,δt'是時間間隔,ri為分辨率指數。
24、優選的,通過對傾角傳感器測量重力加速度時生成的噪聲水平指數、漂移指數、分辨率指數進行綜合分析,生成測影響指數θθτ,用于評估傳感器的整體性能,影響指數生成的計算公式為:
25、
26、,式中,x1、x2、x3分別為噪聲水平指數nli、漂移指數di以及分辨率指數ri的預設比例系數,且x1、x2、x3均大于0。
27、優選的,將傾角傳感器測量重力加速度時生成的測影響指數與預先設定的測影響指數參考閾值進行比對分析,若測影響指數大于等于測影響指數參考閾值,則生成測量精度影響信號,并對該信號發出異常提示,通知相關工作人員知曉,若若測影響指數小于測影響指數參考閾值,則生成測量精度精確信號,不對該信號發出異常提示,此時表明傾角傳感器可對重力加速度精確測量。
28、優選的,將節點用n進行表示,節點n相對節點1的坐標系中表示為:(l2x+l3x+…+lnx,l2y+l3y+…+lny,l2z+l3z+…+lnz),經過時間t后,此時兩個相鄰節點長度為l',l'=l+δl,其中δl為伸縮傳感器在巖層作用下伸長或縮短量;
29、計算部分參照步驟五、步驟六,變換后節點n處的坐標表示為(l'2x+l3'x+…+l'nx,l'2y+l3'y+…+l'ny,l'2z+l3'z+…+l'nz),通過比較前后兩個時間點的坐標值變化,確定節點在空間中的位移量和位移方向。
30、一種用于巖層橫向與縱向位移測量系統,包括鉆孔與參數調整模塊、設備檢查與調整模塊、數據采集與傳輸模塊、空間坐標計算模塊、測量精度監控模塊、坐標系統建立模塊、桿件長度變化計算模塊、位移分析模塊以及數據處理與顯示模塊;
31、鉆孔與參數調整模塊,根據地質勘探結果和監測需求規劃鉆孔位置,按照預先確定的孔洞位置,在巖層中逐步鉆探,鉆孔過程中,根據地質情況及時調整鉆探參數,確保孔洞的質量和準確度;
32、設備檢查與調整模塊,進行對監測設備的檢查和調整,確保檢測設備安裝正確并有效地覆蓋到所需測試的區域;
33、數據采集與傳輸模塊,安裝數據采集器,確保其有效地對監測設備進行實時的數據采集、儲存、處理,建立數據傳送系統,將采集到的數據傳輸至數據處理中心;
34、空間坐標計算模塊,通過傾角傳感器測量重力加速度在不同軸上的數據,并結合兩個相鄰節點長度計算相對大地坐標系下各桿件的初始狀態及各節點處的空間坐標;
35、測量精度監控模塊,對傾角傳感器測量重力加速度的測量精度進行實時監控,對傾角傳感器測量重力加速度的測量精度影響進行實時分析;
36、坐標系統建立模塊,以監測設備的節點1為原點(0,0,0)構建大地坐標系,通過矢量累加獲得整個監測設備中各節點處的坐標值;
37、桿件長度變化計算模塊,經過時間t后,通過各桿件位置情況計算桿件長度變化情況;
38、位移分析模塊,根據前后獲取的累加后節點n處的坐標值,計算該節點處的位移情況和位移空間方向;
39、數據處理與顯示模塊,在數據處理中心,對傳輸的數據進行處理和分析,提取節點處的位移情況和位移空間方向信息,并生成圖像顯示結果。
40、在上述技術方案中,本發明提供的技術效果和優點:
41、本發明通過桿中的傾角傳感器和伸縮傳感器,反映監測設備在巖層中的傾角和長度變化,可以有效計算出巖層在縱向與橫向的運動位移,使用傾角傳感器來測量重力加速度在不同軸向上的數據,以反映物體在x、y和z軸上的角度,結合桿件長度及巖層中伸縮長度,通過將公式轉換成大地坐標系下的角度并計算各桿件中節點初始空間坐標,以監測設備的節點1為監測設備坐標原點構建大地坐標系,通過矢量累加獲得各節點相對節點1處的坐標,再通過運動前后坐標點即可計算各節點相對初始狀態的位移,通過前后獲取的累加后節點n處的坐標值,能夠準確計算該節點發生的位移情況及位移空間方向,通過比較不同時間點的坐標值,可以確定節點的位移量和位移方向,從而深入了解該處結構的變化和演化過程。
42、本發明適用于多種監測情況,包括頂板巖層、洞室和邊坡,對于頂板巖層監測,本發明可用于實時監測巖層的位移情況,預警可能的巖石坍塌或頂板失穩的風險,在洞室監測方面,該發明可幫助監測洞室內部巖體的變形和位移,及時發現洞室支護結構的損壞或變形,保障洞室的穩定運行,同時,針對邊坡監測。
43、本發明能夠對邊坡進行實時監測,及時發現并預警邊坡的位移和滑坡風險,為防災減災提供了重要的數據支持,該監測設備適用于各種安裝角度,包括橫向、傾斜和縱向等各種安裝條件,并且在這些情況下都能正常運行。
44、本發明通過實時監控和分析傾角傳感器的測量影響指數,并與預設閾值進行比較,可以有效地提高監測系統的可靠性和精確性,這種方法使得任何超出閾值的情況能夠迅速被檢測并通過異常提示通知相關工作人員,從而可以及時進行設備調整或維修,避免因設備精度下降而引起的數據誤差和可能的安全風險,此外,當測量指數在閾值之下時,確認系統的準確性,保證了監測數據的質量和巖層移動分析的準確性,提高了整體作業的效率和安全性。
- 還沒有人留言評論。精彩留言會獲得點贊!