一種自動駕駛車輛的測距裝置及方法與流程
本發明是一種自動駕駛車輛的測距裝置及方法,屬于測距。
背景技術:
1、自動駕駛車輛又稱無人駕駛汽車等,是一種通過車載電腦系統實現無人駕駛的智能車輛,為了保證車輛進行安全的自動駕駛,一般采用測距裝置來測量與車輛附近物品之間的距離,并將檢測到的距離信息傳送至汽車的控制器中,供駕駛人員參考或在自動駕駛中汽車控制器能根據測距裝置返回的信號來實現安全的自動駕駛;
2、目前自動駕駛車輛的測距裝置一般采用光波傳感器等光學元件的光波反射來確定目標物體的距離,而光學元件的安裝一般呈固定狀態,但是附近物品與車輛之間易形成夾角狀態,導致光學元件發射出的光波會被呈夾角狀態的附近物品表面產生折射,致使光學元件未接收到有效的反射光波,從而干擾測距準確性,會影響探測器的測距質量,進而影響車輛的正常行駛。
技術實現思路
1、針對現有技術中的問題,本發明提供了一種自動駕駛車輛的測距裝置及方法。
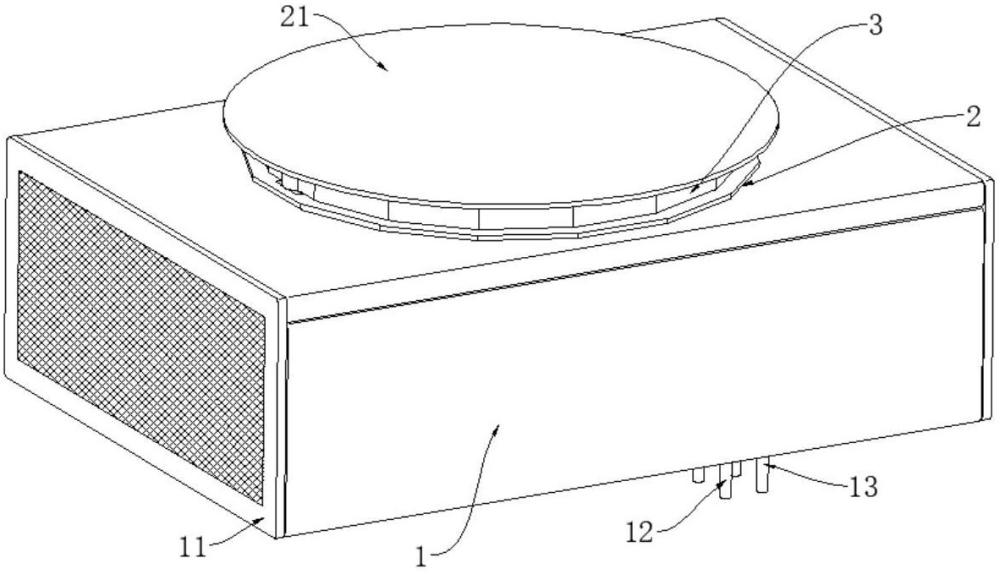
2、本發明解決其技術問題所采用的技術方案是:一種自動駕駛車輛的測距裝置,包括矩形殼,所述矩形殼上端中部設置安裝架,且安裝架橫截面呈多邊形,所述安裝架外端面向內凹陷形成凹槽,且凹槽橫截面呈多邊形,所述凹槽內活動安裝同步帶,所述同步帶內壁嚙合多個張緊齒輪,且張緊齒輪呈豎向布置,多個所述張緊齒輪等距轉動連接在凹槽內部,且多個張緊齒輪分別位于凹槽的多個棱角位置上,所述同步帶外端對稱設置兩個探測器,且兩個探測器均位于凹槽內;
3、所述矩形殼上端設置驅動件,且驅動件延伸入矩形殼內,所述驅動件右端穿過安裝架并與同步帶內壁連接,所述矩形殼上端安裝輔助件,且輔助件位于驅動件左側,所述輔助件左端穿過安裝架并與同步帶內壁連接,所述矩形殼內安裝氣源件且氣源件延伸入矩形殼下側。
4、進一步地,所述氣源件包括錐形筒,所述錐形筒安裝在矩形殼內,且錐形筒呈左寬右窄布置,所述錐形筒右端連通設置帶有第一單向閥的連接管,所述連接管下端連通安裝帶有第一控制閥的通氣管,且通氣管位于第一單向閥右側,所述通氣管另一端連通設置新風組件,所述新風組件安裝在矩形殼內部底端,且新風組件延伸出矩形殼下側。
5、進一步地,所述新風組件包括功能盒,所述功能盒安裝在矩形殼內部底端,且功能盒上端與通氣管另一端連通布置,所述功能盒內部設置隔板,且隔板橫截面呈波浪形,所述隔板位于通氣管與功能盒連通位置右側,所述功能盒內部右壁等距安裝多個擋板,且多個擋板左端分別延伸入隔板的多個槽內,所述擋板呈左高右低傾斜布置;
6、所述功能盒右端面向左凹陷形成通槽,且通槽與功能盒的內腔連通布置,所述通槽位于擋板上側,所述功能盒下端等距連通安裝多個進氣管,多個所述進氣管均延伸出矩形殼下側,多個所述進氣管與功能盒連通位置均位于隔板左側,所述功能盒下端等距連通設置多個出氣管,多個所述出氣管均延伸出矩形殼下側,多個所述出氣管與功能盒連通位置均位于隔板右側。
7、進一步地,所述連接管右端連通安裝軟管,所述軟管另一端連通設置帶有第二控制閥的噴管,所述噴管下端安裝托舉桿,且托舉桿另一端與功能盒上端滑動連接,所述功能盒上端設置第一伸縮設備,所述第一伸縮設備的活動部與托舉桿后端連接。
8、進一步地,所述驅動件包括轉軸,所述轉軸轉動連接在矩形殼內,且轉軸延伸出矩形殼上側,所述轉軸外端等距設置多個扇葉,且多個扇葉均位于功能盒右側,所述扇葉處在噴管正右方;
9、所述安裝架內壁面向右凹陷形成第一缺口槽,且第一缺口槽與凹槽連通布置,所述轉軸上端延伸入第一缺口槽內,且第一缺口槽位于張緊齒輪外側,所述轉軸外端設置轉動齒輪,且轉動齒輪位于第一缺口槽內,所述轉動齒輪與同步帶內部右壁嚙合,所述轉動齒輪左端嚙合計數器,所述計數器設置在矩形殼上端,且計數器位于安裝架內。
10、進一步地,所述輔助件包括第二伸縮設備,所述第二伸縮設備安裝在矩形殼上端,且第二伸縮設備位于安裝架內,所述第二伸縮設備處在計數器左側,所述第二伸縮設備的活動部左端連接功能齒輪;
11、所述安裝架內壁面向左凹陷形成第二缺口槽,且第二缺口槽與凹槽連通布置,所述第二缺口槽位于張緊齒輪外側,所述功能齒輪左端嚙合輔助齒輪,且輔助齒輪位于第二缺口槽內,所述輔助齒輪轉動連接在矩形殼上端上。
12、進一步地,所述矩形殼上端中部安裝終端器,且終端器位于第二伸縮設備與計數器之間,所述終端器分別與第一伸縮設備、第二伸縮設備、計數器、兩個探測器、第一控制閥以及第二控制閥電連接;
13、所述安裝架上端設置錐形罩,且錐形罩呈下寬上窄布置,所述矩形殼左右兩端均安裝防塵網。
14、一種自動駕駛車輛的測距方法,應用上述任意一項所述的自動駕駛車輛的測距裝置,包括以下步驟:
15、第一步、驅動,先利用第一伸縮設備以及托舉桿,使噴管前后運動到合適位置,進而使噴管與四個扇葉形成的結構形成偏心布置,在車輛自動行駛過程中,外界氣體會進入錐形筒內并進行匯集,再使匯集的氣體會沿著連接管、軟管進入噴管,并通過噴管向結構噴射氣體,從而使結構、轉軸以及轉動齒輪轉動,從而使同步帶轉動,并使兩個探測器轉動;
16、第二步、調節,通過計數器以及終端器來計算兩個探測器運動距離,使兩個探測器運動一個固定距離,再通過第二伸縮設備使功能齒輪運動并與輔助齒輪嚙合,從而使同步帶停止運動,此時探測器與行駛車輛的長度方向形成夾角;
17、第三步、測距,若探測器與被檢測物件的表面形成垂直狀態,然后探測器發出光波,當光波與被檢測物件接觸后會被反射,然后探測器接收反射光波,從而計算分析出行駛車輛與被檢測物件之間距離,若探測器與被檢測物件的表面形成夾角狀態,探測器未接收到有效的反射光波,再次進行第一步驟以及第二步驟運行,使兩個探測器再次運動一個固定距離,然后通過探測器再次進行檢測,若探測器再次未接收到有效的反射光波,再次進行第一步驟以及第二步驟運行,使兩個探測器的位置在180°范圍內進行調整,從而檢測到有效距離。
18、本發明的有益效果:
19、1、通過轉動齒輪、輔助齒輪以及多個張緊齒輪,使同步帶以及兩個探測器發生同向轉動,并使兩個探測器在外觀呈多邊形的同步帶作用下與車輛的長度方向形成一個預定夾角,再利用探測器進行測距作業,實現可對探測器進行角度調整,保證探測器能進行有效的檢測作業,提升測距質量,有效保證車輛正常行駛。
20、2、通過第二電動推桿以及托舉桿,使噴管與由四個扇葉形成的結構偏心布置,同時外界氣體因車輛的行駛會進入矩形殼內的錐形筒內,而錐形筒會對外界氣體進行收集和匯集,然后匯集的氣體沿著連接管、軟管以及噴管向結構方向進行噴射,從而使扇葉、轉軸以及轉動齒輪轉動,并在輔助齒輪以及多個張緊齒輪輔助下,使同步帶以及兩個探測器發生同向轉動,實現利用車輛行駛產生的氣體來進行探測器位置的調節,有效降低設備成本,同時通過第二電動推桿以及托舉桿,使噴管與結構的偏心方向發生改變,從而使同步帶在凹槽內發生反向轉動,實現兩個探測器在180°范圍內進行循環運動,有效保證探測器能正常進行角度調整作業。
21、3、通過隔板、功能盒、通氣管、多個出氣管以及多個進氣管,一方面實現車輛內外氣體進行交換,有效保證車輛內氣體的新鮮度,有效保證車輛內人員的舒適度,另一方面對進入車輛內的外界氣體進行預處理,有效保證車輛內溫度,并提升資源利用率,并且橫截面呈波浪形的隔板的設計會增加車輛內外氣體在功能盒內流動時間,保證對外界氣體進行有效的預處理,并且擋板的設計,進一步加大車輛氣體在功能盒內流動時間,進一步加大資源利用率,達到同步帶轉動操作與車輛內外氣體交換操作之間產生聯動,有效保證對錐形筒內收集的氣體進行連續性的利用,有效減少錐形筒內收集的氣體對車輛行駛產生的阻力概率,有效保證車輛正常行駛。
22、4、利用氣囊對外界氣體進行臨時存儲,當在車輛停止行駛同時同步帶需求轉動時,氣囊內存儲氣體沿著輔助管、軟管以及噴管向外噴射,從而驅動同步帶運動預定距離,用于保證對探測器進行有效的角度調整,實現在停車時探測器仍能進行有效的檢測作業,有效保證探測器的測距質量。
- 還沒有人留言評論。精彩留言會獲得點贊!