基于尾渦特性的水下航行器間接探測方法和裝置
本發明涉及水下偵察監視,尤其涉及一種基于尾渦特性的水下航行器間接探測方法和裝置。
背景技術:
1、隨著降噪技術的發展,表面聲波降噪技術已經可以做到讓水下航行體的反射聲波接近于海洋自身的背景噪聲,傳統的直接探測水下航行器本身的聲學方法已經不能滿足現代水下航行器探測需求。
2、尾跡探測技術是利用水下航行器在水下航行所產生的尾跡進行探測的技術。通過對尾跡進行探測來實現對水下航行器的間接探測。水下航行器尾跡包括:航跡尾流,氣泡尾流,熱尾流以及尾渦。針對不同的尾跡衍生出不同的探測技術。紅外探測主要利用紅外探測儀,探測水下航行器的熱尾流。紅外探測儀工作較為隱蔽,不易被發現,無論日夜均可使用。合成孔徑雷達(sar)主要利用微波探測海面,對擴散到海面上的航跡尾跡進行探測。具有定位精度高、探測范圍廣、發現目標快、能在惡劣環境和黑夜中工作等優點。
3、雖然,目前存在一部分比較成熟的新型探測技術,但是各種新型探測技術因為其原理特性仍存在一定的局限。磁異探測對磁異常源的分辨能力有限,而且目標磁場信號較弱、磁場衰減迅速。激光探測器作用范圍有限,一般有效作用范圍為百米內,由于海水水體對光的衰減嚴重,使得激光經過水體的多次散射后難以找到其原始方向信息。紅外探測主要利用水下航行器的熱尾跡信息進行探測,僅能檢測到附近是否有目標,無法確定目標的具體位置,而且惡劣天氣對其影響較大,sar工作頻段是微波頻段,微波很難穿透海水,因此探測范圍受限。sar只能對海面進行探測。
技術實現思路
1、有鑒于此,有必要提供一種基于尾渦特性的水下航行器間接探測方法和裝置,用以解決現有技術中新型探測技術的探測容易受到海水的干擾從而導致探測范圍受限的技術問題。
2、為了解決上述問題,本發明提供一種基于尾渦特性的水下航行器間接探測方法,包括:
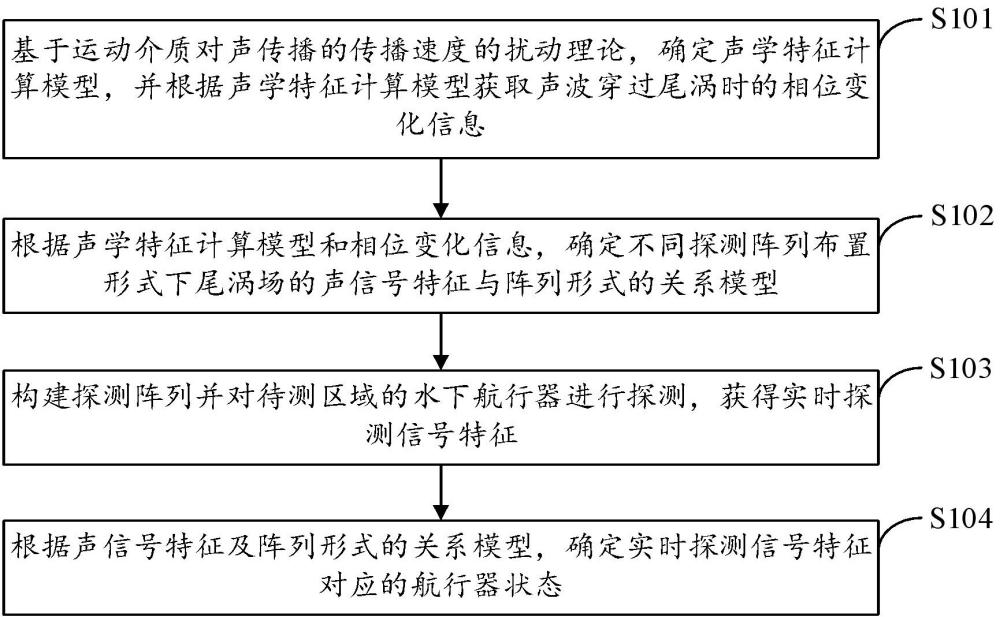
3、基于運動介質對聲傳播的傳播速度的擾動理論,確定聲學特征計算模型,并根據聲學特征計算模型獲取聲波穿過尾渦時的相位變化信息;
4、根據聲學特征計算模型和相位變化信息,確定不同探測陣列布置形式下尾渦場的聲信號特征與陣列形式的關系模型;
5、構建探測陣列并對待測區域的水下航行器進行探測,獲得實時探測信號特征;
6、根據聲信號特征及陣列形式的關系模型,確定實時探測信號特征對應的航行器狀態。
7、在一種可能的實現方式中,所述基于運動介質對聲傳播的傳播速度的擾動理論確定聲學特征計算模型,并根據聲學特征計算模型獲取聲波穿過尾渦時的相位變化信息,包括:
8、根據運動介質對聲傳播的速度影響程度,確定介質中某一點的聲速;
9、根據某一點的聲速,以及區域的流場數據,確定聲在對應區域的傳播時間;
10、根據聲的傳播時間,確定聲經過渦流場的收發信號的時延量和相位差。
11、在一種可能的實現方式中,所述根據某一點的聲速,以及區域的流場數據,確定聲在對應區域的傳播時間,包括:
12、對流場數據進行插值處理,得到插值結果;
13、將區域的聲傳播路徑劃分為多個等間隔的聲傳播點;
14、根據插值結果和多個等間隔的聲傳播點,確定聲在對應區域的傳播時間。
15、在一種可能的實現方式中,所述根據聲學特征計算模型和相位變化信息,確定不同探測陣列布置形式下尾渦場的聲信號特征與陣列形式的關系模型,包括:
16、采用預設計算流體力學方法獲取水下航行器的預設尾渦形態;
17、通過不同的聲信號傳播路徑,基于聲學特征計算模型,確定預設尾渦形態下不同探測陣列對應的聲信號特征;
18、根據不同陣列對應的聲信號特征確定關系模型。
19、在一種可能的實現方式中,所述預設尾渦形態包括第一狀態尾渦和第二狀態尾渦;所述關系模型包括:
20、當預設尾渦形態為第一狀態尾渦時,采用垂直陣列獲取的聲波穿過尾渦時的相位變化幅度大于采用水平陣列獲取的聲波穿過尾渦時的相位變化幅度,確定采用垂直陣列獲取的聲信號特征對應第一狀態尾渦;
21、當預設尾渦形態為第二狀態尾渦時,采用水平陣列獲取的聲波穿過尾渦時的相位變化幅度大于采用垂直陣列獲取的聲波穿過尾渦時的相位變化幅度,確定采用水平陣列獲取的聲信號特征對應第二狀態尾渦。
22、在一種可能的實現方式中,所述根據聲信號特征及陣列形式的關系模型,確定實時探測信號特征對應的航行器狀態,包括:
23、當實時探測信號特征為通過水平探測陣列獲取的,則確定實時探測信號特征對應的航行器狀態為第二狀態尾渦;
24、當實時探測信號特征為通過垂直探測陣列獲取的,則確定實時探測信號特征對應的航行器狀態為第一狀態尾渦。
25、在一種可能的實現方式中,所述確定實時探測信號特征對應的航行器狀態,還包括:
26、基于構建的探測陣列,確定實時探測信號特征對應的傳感器位置;
27、根據傳感器位置,確定尾渦位置;
28、根據尾渦位置,確定航行器位置。
29、第二方面,本發明還提供一種基于尾渦特性的水下航行器間接探測裝置,包括:
30、相位變化信息確定模塊,用于基于運動介質對聲傳播的傳播速度的擾動理論,確定聲學特征計算模型,并根據聲學特征計算模型獲取聲波穿過尾渦時的相位變化信息;
31、關系模型確定模塊,用于根據聲學特征計算模型和相位變化信息,確定不同探測陣列布置形式下尾渦場的聲信號特征與陣列形式的關系模型;
32、實時信號獲取模塊,用于構建探測陣列并對待測區域的水下航行器進行探測,獲得實時探測信號特征;
33、狀態確定模塊,用于根據聲信號特征及陣列形式的關系模型,確定實時探測信號特征對應的航行器狀態。
34、第三方面,本發明還提供了一種電子設備,包括:處理器和存儲器;
35、所述存儲器上存儲有可被所述處理器執行的計算機可讀程序;
36、所述處理器執行所述計算機可讀程序時實現如上所述的基于尾渦特性的水下航行器間接探測方法中的步驟。
37、第四方面,本發明還提供了一種計算機可讀存儲介質,所述計算機可讀存儲介質存儲有一個或者多個程序,所述一個或者多個程序可被一個或者多個處理器執行,以實現如上所述的基于尾渦特性的水下航行器間接探測方法中的步驟。
38、本發明的有益效果是:首先基于運動介質對聲傳播的傳播速度的擾動理論,確定聲學特征計算模型,隨后根據聲學特征計算模型通過在算法中改變聲傳播方向,根據聲學特征計算模型獲取聲波穿過尾渦時的相位變化信息;模擬獲得不同陣列布置形式下尾渦的聲信號特征,從而確定不同探測陣列布置形式下尾渦場的聲信號特征與陣列形式的關系模型;基于關系模型構建探測陣列并對待測區域的水下航行器進行探測,獲得實時探測信號特征;并根據聲信號特征及陣列形式的關系模型,確定實時探測信號特征對應的航行器狀態。本發明一方面利用聲信號在水下衰減小的特性,通過水下航行器尾渦進行水下航行器間接探測,提高了水下航行器的探測距離。另一方面,通過構建關系模型和聲學特征計算模型,減少了探測過程的計算量,提高了探測效率。
- 還沒有人留言評論。精彩留言會獲得點贊!