基于北斗網格位置碼的工業園區環境監測感知方法與流程
本技術的實施例涉及環境監測,特別涉及一種基于北斗網格位置碼的工業園區環境監測感知方法。
背景技術:
1、隨著經濟的發展,有效利用能源、減少環境污染、降低安全生產事故頻次,防止突發環境事件,確保生命安全的重要性日益凸顯。隨著工業園區的發展,其周邊環境面臨著嚴峻的挑戰,可持續發展壓力加大,而環境的惡化反過來也會嚴重制約工業園區的發展。
2、近年來,國內外工業園區頻頻發生的環境污染事故,這位工業園卻的環境風險應急處理能力敲響了警鐘,工業園區內的環保部門需要時刻保持高度警惕,嚴防環境污染事故的發生,為了提高應急快速響應能力,面向工業園區的環境監測系統應運而生。
3、公開號為cn116503226a的發明專利公開了一種基于物聯網的化工園區環境監測管理系統,該系統包括基礎設施層、數據支撐層、應用中臺層、應用服務層與綜合展示層,通過部署前端環境數據采集設備統一獲取園區內部及周邊大氣、水、污染源等信息,經過新一代通信技術統一傳輸到園區環境管理數據中心,通過能力支撐中臺中內置的組件引擎實現對上層環境監測管理業務應用的快速開發和業務流程配置,實現對化工園區環境污染的實時動態監測,在展示層,在地圖上標記監測點位,實現實時、直觀、動態、可視化的呈現園區環境監測點位和實時狀態。
4、然而,上述方法傳輸監測數據依賴網絡信號,對涉密企業或在高空、水下的監測設備來說,網絡信號中斷,會造成監測數據采集不連貫,數據上傳共享不及時的問題,上述系統是以監測儀為單點進行報警提示,依賴人工判讀和執行以此點為中心向周邊輻射的手動聯動報警或應急指揮等工作,存在漏報、通知不及時、應急指揮盲調的問題,另外,上述方法提供的監測數據不夠直觀,無法呈現污染實際面和趨勢,無法快速的為管理人員和決策層提供判斷依據。
技術實現思路
1、有鑒于此,本技術的實施例提出了一種基于北斗網格位置碼的工業園區環境監測感知方法,可以直觀的呈現工業園區中的污染物排放情況和污染程度,實現了工業園區環境監測感知的數字化轉型,防止環境污染事故的發生。
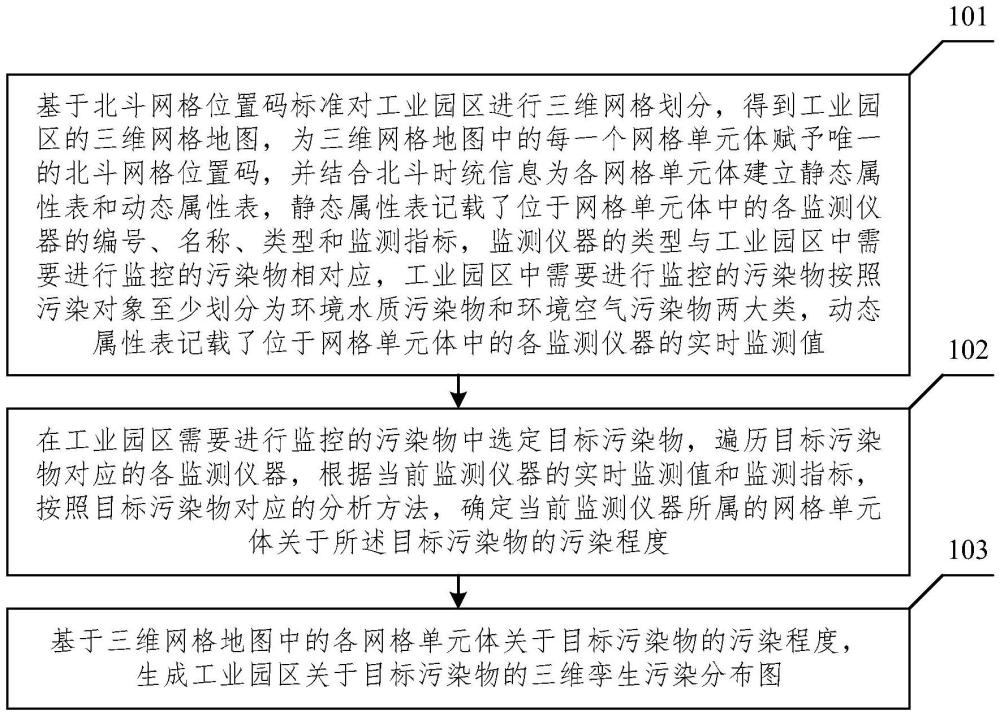
2、第一方面,本技術的實施例提出了一種基于北斗網格位置碼的工業園區環境監測感知方法,所述方法包括以下步驟:基于北斗網格位置碼標準對工業園區進行三維網格劃分,得到所述工業園區的三維網格地圖,為所述三維網格地圖中的每一個網格單元體賦予唯一的北斗網格位置碼,并結合北斗時統信息為各所述網格單元體建立靜態屬性表和動態屬性表;其中,所述靜態屬性表記載了位于所述網格單元體中的各監測儀器的編號、名稱、類型和監測指標,所述監測儀器的類型與所述工業園區中需要進行監控的污染物相對應,所述工業園區中需要進行監控的污染物按照污染對象至少劃分為環境水質污染物和環境空氣污染物兩大類,所述動態屬性表記載了位于所述網格單元體中的各監測儀器的實時監測值;在所述工業園區需要進行監控的污染物中選定目標污染物,遍歷所述目標污染物對應的各監測儀器,根據當前監測儀器的實時監測值和監測指標,按照所述目標污染物對應的分析方法,確定所述當前監測儀器所屬的網格單元體關于所述目標污染物的污染程度;其中,所述污染程度為符合標準、輕度污染、中度污染或重度污染;基于所述三維網格地圖中的各網格單元體關于所述目標污染物的污染程度,生成所述工業園區關于所述目標污染物的三維孿生污染分布圖;其中,在所述三維孿生污染分布圖中,使用不同色深展示不同的污染程度。
3、通過上述方式,不僅能夠定位監測設備、污染源,更能夠完成覆蓋整個工業園區的環境監測感知,實現整個工業園區的環境監測感知的靜態和動態映射,實現污染物污染情況的數字孿生。通過基于北斗網格位置碼標準的三維網格劃分,使得環境監測感知的范圍不僅僅限制于二維平面,而是延伸至三維空間,能夠實時探測地表水、地下水、高空大氣等對象,環境監測感知的精度高、范圍廣、響應迅速,很好地解決了以往環境監測感知數據量大繁復、數字化僅流于表面的痛點,將環境污染事故的判別由人為判別轉化自動輔助判別與人為判別并行,大大減少了漏報、通知不及時、應急指揮盲調等情況的出現。三維孿生污染分布圖的設計能夠幫助工業園區更直觀、可視的呈現污染物排放情況和污染程度,很好地實現工業園區環境監測感知的數字化轉型,更好的幫助各級單位和工業園區管理人員監管危化品企業的污染物排放,嚴格執行國家及行業環保標準,避免環境污染事故的發生。
4、可選地,所述環境水質污染物至少包括:氨氮、總氮、硫化物、總磷、高錳酸鹽、汞砷硒鉍銻、大腸菌群、細菌和揮發性有機物;所述氨氮、所述總氮和所述硫化物對應的分析方法為氣相分子吸收光譜法;所述總磷對應的分析方法為鉬酸銨分光光度法;所述高錳酸鹽對應的分析方法為高錳酸鹽指數水質自動分析法;所述汞砷硒鉍銻對應的分析方法為原子熒光法;所述大腸菌群和所述細菌對應的分析方法為酶-底物法;所述揮發性有機物對應的分析方法為吹掃捕集法或氣相色譜法。
5、可選地,若選定的目標污染物為環境水質污染物,則在所述遍歷所述目標污染物對應的各監測儀器之前,所述方法還包括:派出具備潛航能力的與所述目標污染物對應的潛航監測儀器,按照預設路線在所述工業園區的水域中航行,在進入每一個屬于所述工業園區的水域的網格單元體后停留并對所述目標污染物進行實時監測,將所述潛航監測儀器及其測得的潛航監測值更新至各屬于所述工業園區的水域的網格單元體的動態屬性表中;所述根據當前監測儀器的實時監測值和監測指標,按照所述目標污染物對應的分析方法,確定所述當前監測儀器所屬的網格單元體關于所述目標污染物的污染程度,包括:根據當前監測儀器的實時監測值和監測指標,以及所述當前監測儀器所屬的網格單元體的動態屬性表中記載的潛航監測值,按照所述目標污染物對應的分析方法,確定所述當前監測儀器所屬的網格單元體關于所述目標污染物的污染程度。對于環境水質監測而言,除了工業園區中已經設置的相關的檢測儀器外,管理中心還可以派出具備潛航能力的潛航監測儀器進行移動監測,為目標污染物的監測提供更豐富的一手數據,進一步提升了環境監測感知的精度和全面性,為環境污染事故的判別提供更精確、更真實的依據。
6、可選地,所述環境空氣污染物至少包括:二氧化硫、二氧化氮、一氧化碳、臭氧、總懸浮顆粒物、pm10、pm2.5、氮氧化物、鉛、苯并芘、總烴、甲苯、二甲苯和苯乙烯;所述二氧化硫對應的分析方法為甲醛吸收-副玫瑰苯胺分光光度法或四氯汞鹽-副玫瑰苯胺分光光度法;所述二氧化氮和所述氮氧化物對應的分析方法為鹽酸萘乙二胺分光光度法;所述一氧化碳對應的分析方法為非分散紅外法;所述臭氧對應的分析方法為靛藍二磺酸鈉分光光度法或紫外光度法;所述總懸浮顆粒物、所述pm10和所述pm2.5對應的分析方法為重量法;所述鉛對應的分析方法為石墨爐原子吸收分光光度法或火焰原子吸收分光光度法;所述苯并芘對應的分析方法為乙酰化濾紙層析熒光分光光度法;所述總烴、所述甲苯、所述二甲苯和所述苯乙烯對應的分析方法為氣相色譜法。
7、可選地,若選定的目標污染物為環境空氣污染物,則在所述遍歷所述目標污染物對應的各監測儀器之前,所述方法還包括:派出具備飛行能力的與所述目標污染物對應的飛行監測儀器,按照預設路線在所述工業園區的空域中飛行,在進入每一個屬于所述工業園區的空域的網格單元體后停留并對所述目標污染物進行實時監測,將所述飛行監測儀器及其測得的飛行監測值更新至各屬于所述工業園區的空域的網格單元體的動態屬性表中;所述根據當前監測儀器的實時監測值和監測指標,按照所述目標污染物對應的分析方法,確定所述當前監測儀器所屬的網格單元體關于所述目標污染物的污染程度,包括:根據當前監測儀器的實時監測值和監測指標,以及所述當前監測儀器所屬的網格單元體的動態屬性表中記載的飛行監測值,按照所述目標污染物對應的分析方法,確定所述當前監測儀器所屬的網格單元體關于所述目標污染物的污染程度。對于環境空氣監測而言,除了工業園區中已經設置的相關的檢測儀器外,管理中心還可以派出具備飛行能力的飛行監測儀器進行移動監測,為目標污染物的監測提供更豐富的一手數據,進一步提升了環境監測感知的精度和全面性,為環境污染事故的判別提供更精確、更真實的依據。
8、可選地,在所述基于所述三維網格地圖中的各網格單元體關于所述目標污染物的污染程度,生成所述工業園區關于所述目標污染物的三維孿生污染分布圖之后,所述方法還包括:將所述工業園區關于不同污染物的不同時間的三維孿生污染分布圖疊加在一起,生成所述工業園區的污染分布全時全景圖,在所述污染分布全時全景圖中,使用不同顏色展示不同的污染物,對于同一污染物,使用不同色深展示不同的污染程度,使用時間軸篩選查看不同時間的歷史污染情況。考慮到部分污染物的危害之間具有關聯性,因此管理中心可以將工業園區關于不同污染物的不同時間的三維孿生污染分布圖疊加在一起生成污染分布全時全景圖,進行橫向、縱向的比較分析,從而更好地進行相關決策,保護工業園區的財產安全和工作人員的生命安全。
9、可選地,在所述基于所述三維網格地圖中的各網格單元體關于所述目標污染物的污染程度,生成所述工業園區關于所述目標污染物的三維孿生污染分布圖之后,所述方法還包括:以所述三維網格地圖中的各網格單元體關于所述目標污染物的污染程度為基礎,結合當前季節、當前天氣、當前風向、以及當前生產計劃,預測未來預設時間內的所述目標污染物的排放量和污染擴散情況;將所述目標污染物的排放量以文字的形式疊加在所述工業園區關于所述目標污染物的三維孿生污染分布圖上,并將所述目標污染物的污染擴散情況以動畫的形式疊加在所述工業園區關于所述目標污染物的三維孿生污染分布圖上。污染物的污染情況與季節、天氣、風向、以及生產計劃等因素息息相關,管理中心以各網格單元體關于目標污染物的污染程度為基礎,結合當前季節、當前天氣、當前風向、以及當前生產計劃,預測未來預設時間內的目標污染物的排放量和污染擴散情況,可以預知環境污染事故的發生概率,從而調整生產計劃,實現綠色生產、安全生產。
10、第二方面,本技術的實施例提出了一種基于北斗網格位置碼的工業園區環境監測感知系統,所述系統包括北斗管理模塊、若干個監測儀器、監測管理模塊、分析制圖模塊和顯示大屏;北斗管理模塊,用于基于北斗網格位置碼標準對工業園區進行三維網格劃分,得到所述工業園區的三維網格地圖,為所述三維網格地圖中的每一個網格單元體賦予唯一的北斗網格位置碼,并結合北斗時統信息為各網格單元體建立靜態屬性表和動態屬性表;其中,所述靜態屬性表記載了位于所述網格單元體中的各監測儀器的編號、名稱、類型和監測指標,所述監測儀器的類型與所述工業園區中需要進行監控的污染物相對應,所述工業園區中需要進行監控的污染物按照污染對象至少劃分為環境水質污染物和環境空氣污染物兩大類,所述動態屬性表記載了位于所述網格單元體中的各監測儀器的實時監測值;監測管理模塊,用于在所述工業園區需要進行監控的污染物中選定目標污染物,遍歷所述目標污染物對應的各監測儀器,根據當前監測儀器的實時監測值和監測指標,按照所述目標污染物對應的分析方法,確定所述當前監測儀器所屬的網格單元體關于所述目標污染物的污染程度,其中,所述污染程度為符合標準、輕度污染、中度污染或重度污染;分析制圖模塊,用于基于所述三維網格地圖中的各網格單元體關于所述目標污染物的污染程度,生成所述工業園區關于所述目標污染物的三維孿生污染分布圖,并在所述顯示大屏上對所述三維孿生污染分布圖進行展示,其中,不同的污染程度對應的色深不同。
11、第三方面,本技術的實施例提出了一電子設備,包括:至少一個處理器;以及,與所述至少一個處理器通信連接的存儲器;其中,所述存儲器存儲有可被所述至少一個處理器執行的指令,所述指令被所述至少一個處理器執行,以使所述至少一個處理器能夠執行如上述第一方面中所述的一種基于北斗網格位置碼的工業園區環境監測感知方法。
12、第四方面,本技術的實施例提出了一種計算機可讀存儲介質,存儲有計算機程序,所述計算機程序被處理器執行時,實現如上述第一方面中所述的一種基于北斗網格位置碼的工業園區環境監測感知方法。
13、可以理解的是,上述第二方面至第四方面的有益效果可以參見上述第一方面中的相關描述,在此不再贅述。
- 還沒有人留言評論。精彩留言會獲得點贊!