一種融合姿態跳傘高度測量方法及裝置與流程
本發明涉及到跳傘高度測量,具體涉及到一種融合姿態跳傘高度測量方法及裝置。
背景技術:
1、在跳傘降落過程中,精確的高度測量對于確保跳傘者的安全至關重要。目前,跳傘高度測量主要依賴于氣壓計采集的數據,利用高度與氣壓之間的換算關系來計算出當前的高度。然而,在實際應用中,我們發現跳傘者在空中姿勢的變化會對氣壓計的測量產生顯著影響,這可能導致測量誤差,進而影響到跳傘者的安全。
2、具體來說,當跳傘者在空中改變姿勢時,他們會改變與周圍氣流的相對位置。這可能導致氣壓計受到不同程度的氣流沖擊,從而影響其讀數。例如,當兩個跳傘者背上裝有氣壓計測量裝置進行自由下落時,即使他們到達相同的高度,由于姿勢的不同,氣壓計的讀數也會有所不同。如果一個跳傘者背朝地下落,而另一個面朝地下落,面朝地下落的跳傘者的氣壓傳感器由于處于背風側,測量到的壓力較小,從而使得計算出的高度高于實際高度。
3、另外,跳傘過程中,在主傘未開情況下,跳傘者姿態可能發生旋轉翻滾等情況。這種狀況下,在同一高度,測量高度值會突然變化,甚至造成高度不降反而升高的現象。
4、這種測量誤差可能導致跳傘者錯過安全的開傘高度。在跳傘運動中,過早或過晚開傘都可能帶來嚴重的后果。特別是過晚開傘,將會使跳傘者面臨極高的風險,可能導致身體受傷甚至死亡。
技術實現思路
1、本發明的目的是針對現有技術存在的問題,提供一種融合姿態跳傘高度測量方法及裝置,融合姿勢變化數據對氣壓計測量數據進行動態調整,以確保在各種姿態下都能獲得準確的高度信息。
2、為實現上述目的,本發明采用的技術方案是:
3、一種融合姿態跳傘高度測量方法,包括:
4、在跳傘過程中,實時采集跳傘者的面向氣壓數據與背向氣壓數據,比較兩者的數值大小,取其中數值較大的氣壓數據作為基準氣壓p1,另外一個氣壓數據作為參考氣壓p2;
5、計算基準氣壓p1的變化速率為v1,并設p1的變化速率閾值為v2;
6、比較v1與v2的數值大小,若v1≥v2,則啟動防干擾判斷機制;
7、所述防干擾判斷機制通過融合跳傘者姿態數據,判斷此時氣壓p1變化是否為真實高度變化導致的,若否,則對p1進行修正,若是,則不對p1進行修正;
8、將p1和p2加權平均處理,得到準確氣壓值p3,再將p3換算成對應的海拔高度值。
9、進一步的,所述防干擾判斷機制包括:
10、采集跳傘者的三軸方向角速度數據,并相加得到實時三軸方向角速度和,記為ω0,設三軸方向角速度和的閾值為ω1;
11、比較此時ω0與ω1數值大小,若ω0≥ω1,即此時氣壓p1變化是跳傘者翻滾動作干擾導致的,則對p1數值進行修正;
12、若ω0<ω1,則此時氣壓p1變化是真實高度變化導致的,則不對p1進行修正。
13、進一步的,所述對p1數值進行修正包括:
14、暫時忽略p1數值變化,以上一次記錄的p1歷史值替換為當前值,并保持不變。
15、進一步的,在所述將p1和p2加權平均處理之前,包括:
16、根據歷史氣壓數據,使用平滑濾波算法對參考氣壓p2進行平滑濾波處理。
17、進一步的,所述平滑濾波算法為卡爾曼平行濾波算法,包括:
18、持續收集和存儲p2的歷史氣壓數據,以及三軸方向角速度和的歷史數據,為上述兩個數據源分別設置一個卡爾曼子濾波器,并分為兩個子系統進行狀態估計;
19、對于每個子系統,通過前一時刻的狀態估計值和協方差矩陣來預測當前時刻的狀態估計值和協方差矩陣,當有新的測量值到達時,利用卡爾曼增益和測量殘差來更新子系統的狀態估計,同時更新狀態估計的誤差協方差矩陣;
20、在系統層次,將各個子系統的狀態估計進行融合,得到一個更穩定的氣壓狀態估計,從而實現對參考氣壓p2的濾波處理。
21、進一步的,所述平滑濾波算法為指數滑動平均法,包括:
22、持續收集和存儲p2的歷史氣壓數據;
23、計算經過指數滑動平均處理的氣壓數據為
24、ema(t)=α*x(t)+(1-α)*ema(t-1);
25、其中,α為設定值,x(t)表示時刻為t時采集的氣壓值數據,ema(t-1)表示時刻t-1經過平滑處理的氣壓值數據。
26、進一步的,所述實時采集跳傘者的面向氣壓數據與背向氣壓數據包括:
27、通過在跳傘者背部設置氣壓檢測裝置實時采集跳傘者的面向氣壓數據與背向氣壓數據;
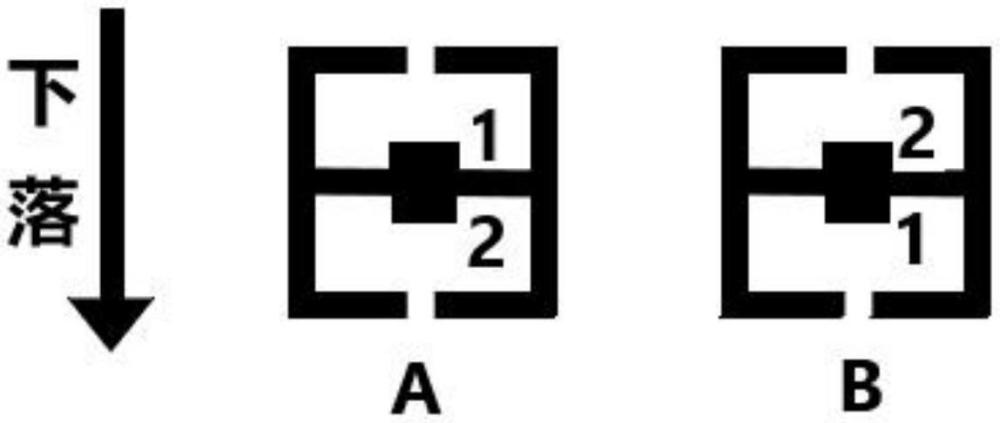
28、氣壓檢測裝置包括裝置殼體,所述裝置殼體的內部設有控制主板,所述控制主板的靠近所述跳傘者的一側設有氣壓傳感器二,所述控制主板的遠離所述跳傘者的一側設有氣壓傳感器一;
29、通過所述氣壓傳感器二采集面向氣壓數據,通過所述氣壓傳感器一采集背向氣壓數據。
30、進一步的,所述取其中數值較大的氣壓數據作為基準氣壓p1,另外一個氣壓數據作為參考氣壓p2包括:
31、所述控制主板設有數值大小比較模塊,所述控制主板讀取面向氣壓數據以及背向氣壓數據,并通過所述數值大小比較模塊獲取其中數值較大的氣壓數據作為基準氣壓p1。
32、進一步的,通過在跳傘者身上設置姿態傳感器獲取跳傘者姿態數據,所述控制主板讀取所述跳傘者姿態數據,用于判斷此時氣壓p1變化是否為真實高度變化導致的。
33、一種融合姿態跳傘高度測量裝置,包括:
34、姿態傳感器,設于跳傘者身上,用于采集跳傘者的三軸角速度;
35、氣壓檢測裝置,設于跳傘者背部,包括裝置殼體,所述裝置殼體的內部設有控制主板,所述控制主板的靠近所述跳傘者的一側設有氣壓傳感器二,所述控制主板的遠離所述跳傘者的一側設有氣壓傳感器一;所述氣壓傳感器二用于采集跳傘者的面向氣壓數據,所述氣壓傳感器一用于采集跳傘者的背向氣壓數據;
36、所述控制主板設有數值大小比較模塊,所述控制主板讀取面向氣壓數據以及背向氣壓數據,并通過所述數值大小比較模塊獲取其中數值較大的氣壓數據作為基準氣壓p1;
37、所述控制主板設有角速度和計算模塊,用于計算跳傘者的三軸角速度和;
38、所述控制主板設有防干擾模塊,用于啟動防干擾判斷機制;
39、所述控制主板設有平滑濾波模塊,用于對參考氣壓p2進行平滑濾波;
40、所述控制主板設有高度計算模塊,用于將p1和p2加權平均處理,得到準確氣壓值p3,再將p3換算成對應的海拔高度值。
41、與現有技術相比,本發明的有益效果是:
42、1.通過采用雙氣壓計雙向采集數據的方式,結合姿態傳感器數據,能夠更準確地測量跳傘過程中的氣壓變化,進而更精確地計算跳傘高度,有效減少了單個傳感器因遮擋等因素造成的測量誤差;
43、2.通過融合算法融合多個傳感器的數據,提供了更可靠的高度指示數據,有助于跳傘者做出更安全的跳傘決策;
44、3.通過采用平滑濾波算法,如卡爾曼平行濾波算法或指數滑動平均法,本技術能夠有效平滑掉氣壓數據中的短期波動和噪聲,提高數據的穩定性和可靠性。
- 還沒有人留言評論。精彩留言會獲得點贊!