道路雷達多徑虛警處理方法、系統、電子裝置和存儲介質與流程
本發明涉及雷達,尤其涉及一種道路雷達多徑虛警處理方法、系統、電子裝置和存儲介質。
背景技術:
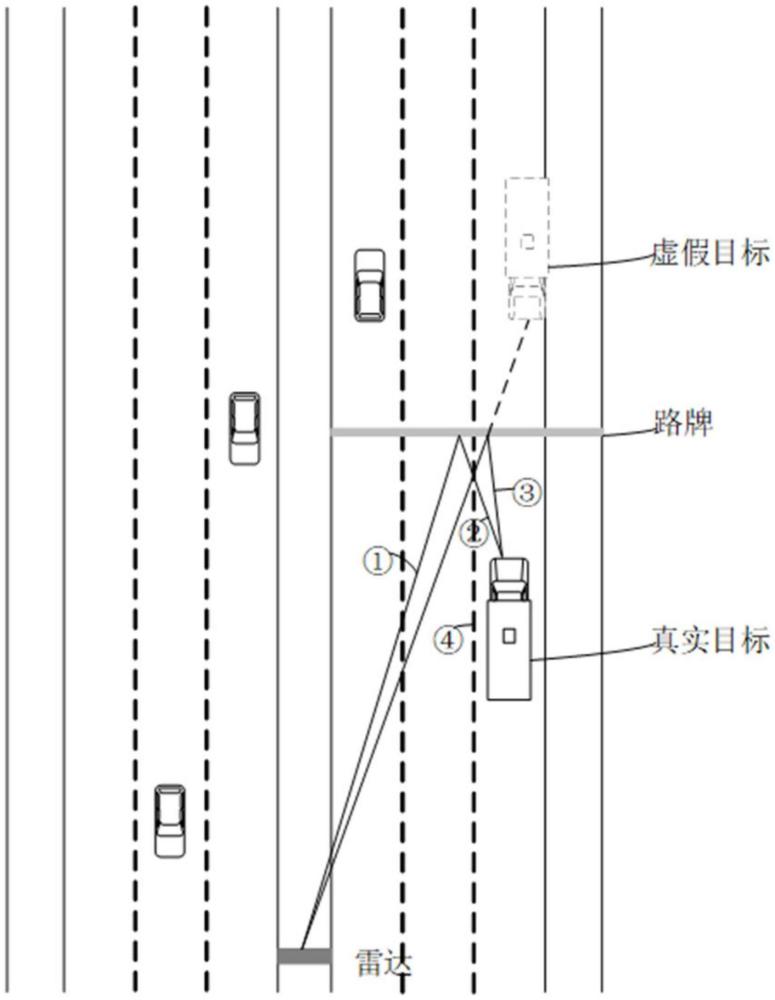
1、隨著智能化交通的發展,公路上也逐漸使用了雷達進行車輛監控,例如使用雷達檢測車輛是否壓線行駛、逆行等,從而進行及時發出警報或報警。然而,高速公路上一般均設置有路牌或者預告牌,預告牌在高速上是很常見的大型金屬目標,若其出現在雷達視場范圍內,由于其對電磁波有極強的反射特性,雷達發射的電磁波,經由路牌反射到達目標后再反射回雷達,則形成了多徑虛假回波,產生虛警。
2、因此亟需一種能夠對多徑虛假回波進行處理的方法,消除虛警現象。
技術實現思路
1、本發明提供了一種道路雷達多徑虛警處理方法、系統、電子裝置和存儲介質,能夠對多徑虛假回波進行處理,消除虛警現象。
2、根據本發明的第一方面,本發明提供一種道路雷達多徑虛警處理方法,包括:取雷達當前幀圖像的軌跡數據集;計算所述數據集中的元素兩兩之間的路牌反射點坐標的解析值;在累積預定數量的解析值后,利用所有的所述解析值形成的解析值數據集生成二維頻率矩陣;對所述二維頻率矩陣二維fft處理得到二維fft數據矩陣,并對所述二維fft數據矩陣計算能量值,得到路牌坐標分布密度譜圖;對所述密度譜圖進行目標檢測,估計出路牌反射點位置坐標的坐標集;利用所述坐標集對雷達跟蹤目標進行多徑虛假目標識別和剔除。
3、進一步地,所述計算所述數據集中的元素兩兩之間的路牌反射點坐標的解析值的步驟包括:在所述軌跡數據集(x,y,v)中任意取兩個元素(xi,yi,vi)和(xj,yj,vj);利用如下公式計算路牌反射點坐標解析值為(xn,yn):
4、
5、其中,軌跡數據集的x表示當前幀軌跡的橫向坐標集,y表示當前幀縱向坐標集,v表示當前幀徑向速度集。
6、進一步地,所述計算所述數據集中的元素兩兩之間的路牌反射點坐標的解析值的步驟還包括:對所述路牌反射點坐標的解析值進行過濾;若路牌反射點坐標的解析值滿足所述過濾條件,則保留,否則剔除。
7、進一步地,所述過濾條件為:
8、
9、其中,vt表示鏡像速度判決門限,rt表示鏡像距離判決門限,且
10、進一步地,所述處理方法還包括:所述在累積預定數量的解析值后的步驟后,停止所述計算所述數據集中的元素兩兩之間的路牌反射點坐標的解析值的步驟。
11、進一步地,所述利用所有所述解析值形成的解析值數據集生成二維頻率矩陣的步驟包括:計算所述解析值數據集中的橫向搜索時間長度與縱向搜索時間長度;利用所述橫向搜索時間長度、所述縱向搜索時間長度以及所述解析值數據集生成二維頻率矩陣,其中,生成二維頻率矩陣的公式為:
12、
13、其中,f(p,q)表示f中的第p行、第q列的元素,q=0,1,…xt-1,p=0,1,…yt-1,xt-1表示所述橫向搜索時間長度,yt-1表示所述縱向搜索時間長度,xb(n)和yb(n)表示所述解析值數據集(xb,yb)中的第n個數據坐標。
14、進一步地,所述計算所述解析值數據集中的橫向搜索時間長度與縱向搜索時間長度的步驟包括:獲取所述解析值數據集(xb,yb)中橫坐標xb和縱坐標yb的最小值與最大值,分別記為xmin、xmax和ymin、ymax;根據預設的橫向搜索步進xstep和縱向搜索步進ystep計算所述橫向搜索時間長度xt和所述縱向搜索時間長度yt,其中,計算公式為:
15、
16、其中,為向上取整操作,可根據所述橫向搜索時間長度xt和所述縱向搜索時間長度yt計算橫向搜索時間為tx=0,1,…xt-1,縱向搜索時間為ty=0,1,…yt-1。
17、進一步地,所述對所述二維fft數據矩陣計算能量值,得到路牌坐標分布密度譜圖的公式為:
18、p(k,l)=real{f2(k,l)}2+imag{f2(k,l)}2;
19、其中,p(k,l)表示所述路牌坐標分布密度譜圖p中的第k行、第l列元素,f2(k,l)表示所述二維fft數據矩陣f2中的第k行、第l列元素,real{}表示取復數數據的實部,imag{}表示取復數數據的虛部,并且k=1,2,…nyfft,l=1,2,…nxfft,其中,nyfft和nxfft分別表示一維fft和二維fft的大小。
20、進一步地,所述對所述密度譜圖進行目標檢測,估計出路牌反射點位置坐標的坐標集的步驟包括:遍歷所述二維fft數據矩陣的所有數據元素p(k,l);判斷是否滿足p(k,l)>pt;若滿足,則輸出其估計的反射點位置坐標(xp,yp);保存所有檢測出的反射點位置坐標,得到反射點位置坐標的坐標集;
21、其中,pt為檢測門限。
22、進一步地,所述利用所述坐標集對雷達跟蹤目標進行多徑虛假目標識別和剔除的步驟包括:對所述軌跡數據集中的軌跡和所述坐標集中的數據進行遍歷,遍歷時從所述軌跡數據集中任意取軌跡i和軌跡j的數據(xi,yi,vi)和(xj,yj,vj),并取所述坐標集中的任一數據(xp,yp);判斷數據(xj,yj,vj)是否滿足判斷公式;若滿足,則判定軌跡j為多徑虛假目標軌跡;在將所述軌跡數據集中的數據和所述坐標集中的數據遍歷完成后,得到若干多徑虛假目標軌跡,對所有的多徑虛假目標軌跡進行剔除;所述判斷公式為:
23、
24、其中,tx為線性判決門限,tr為像距離判決門限,tv為鏡像速度判決門限。
25、根據本發明的第二方面,本發明還提供了一種道路雷達多徑虛警處理系統,包括:數據集獲取模塊,用于獲取雷達當前幀圖像的軌跡數據集;解析值計算模塊,用于計算所述數據集中的元素兩兩之間的路牌反射點坐標的解析值;二維頻率矩陣生成模塊,用于在累積預定數量的解析值后,利用所有所述解析值形成的解析值數據集生成二維頻率矩陣;密度譜圖生成模塊,用于對所述二維頻率矩陣二維fft處理得到二維fft數據矩陣,并對所述二維fft數據矩陣計算能量值,得到路牌坐標分布密度譜圖;位置坐標計算模塊,用于對所述密度譜圖進行目標檢測,估計出路牌反射點位置坐標的坐標集;目標剔除模塊,用于利用所述坐標集對雷達跟蹤目標進行多徑虛假目標識別和剔除。
26、根據本發明的第三方面,本發明還提供了一種電子裝置,包括:存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,所述處理器執行所述計算機程序時,實現上述中的任意一項所述道路雷達多徑虛警處理方法。
27、根據本發明的另一方面,本發明還提供了一種計算機可讀存儲介質,其上存儲有計算機程序,所述計算機程序被處理器執行時,實現上述中的任意一項所述道路雷達多徑虛警處理方法。
28、通過本發明中的上述實施例中的一個實施例或多個實施例,至少可以實現如下技術效果:
29、在本發明所公開的技術方案中,能夠對雷達圖像上的軌跡數據進行路牌反射點的解析,并對解析值進行處理,得到路牌反射點坐標的解析值;利用以上坐標解析值生成二維頻率矩陣,并對該矩陣進行二維fft處理,得到坐標解析值的分布密度圖;對以上分布密度圖進行目標檢測和位置坐標估計,得到路牌多徑反射點坐標的準確值;根據以上得到路牌反射點坐標,消除虛警現象。
- 還沒有人留言評論。精彩留言會獲得點贊!