一種基于仿真有效提高雷達識別目標準確率的模型的制作方法
本發明涉及雷達相關領域,具體為一種基于仿真有效提高雷達識別目標準確率的模型。
背景技術:
1、現有的雷達目標識別技術在復雜環境下識別準確率較低,主要原因在于傳統方法對目標特征的提取和識別算法的有效性不足。隨著雷達技術的發展,如何在多變的環境下有效提高雷達目標識別的準確率成為一個亟待解決的問題。仿真技術作為一種有效的手段,可以提供多樣化的環境和目標特征,對雷達識別算法的訓練和優化具有重要意義。
技術實現思路
1、本發明的目的在于提供一種基于仿真有效提高雷達識別目標準確率的模型,以解決上述背景技術中提出的問題。
2、為實現上述目的,本發明提供如下技術方案:一種基于仿真有效提高雷達識別目標準確率的模型,包括以下步驟:
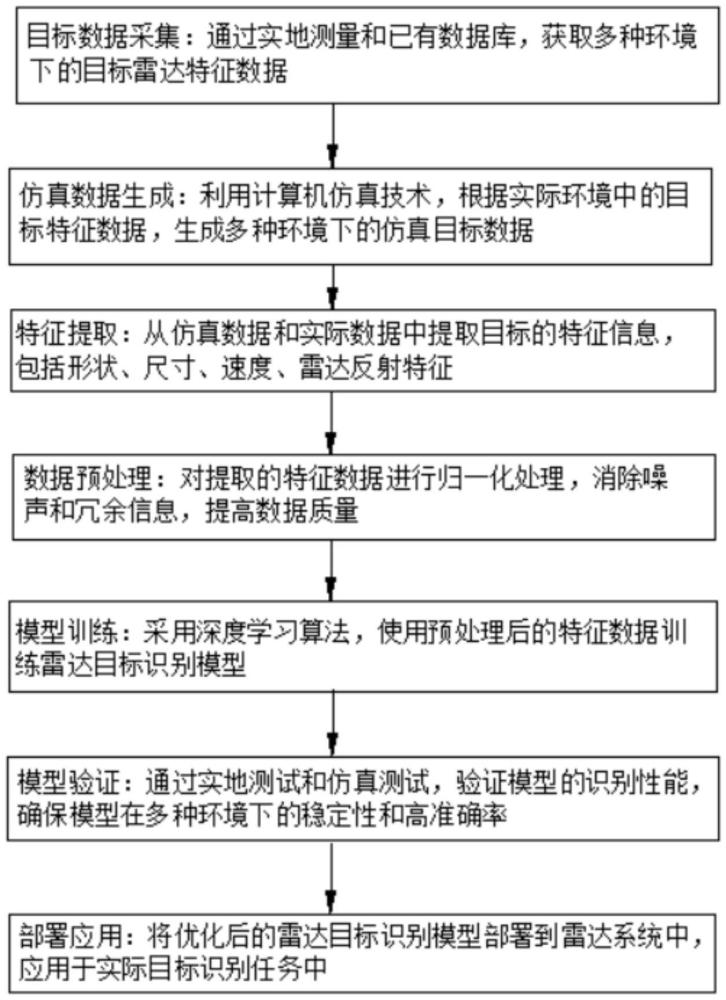
3、步驟s1、目標數據采集:通過實地測量和已有數據庫,獲取多種環境下的目標雷達特征數據
4、步驟s2、仿真數據生成:利用計算機仿真技術,根據實際環境中的目標特征數據,生成多種環境下的仿真目標數據;
5、步驟s3、特征提取:從仿真數據和實際數據中提取目標的特征信息,包括形狀、尺寸、速度、雷達反射特征;
6、步驟s4、數據預處理:對提取的特征數據進行歸一化處理,消除噪聲和冗余信息,提高數據質量;
7、步驟s5、模型訓練:采用深度學習算法,使用預處理后的特征數據訓練雷達目標識別模型;
8、步驟s6、模型驗證:通過實地測試和仿真測試,驗證模型的識別性能,確保模型在多種環境下的穩定性和高準確率;
9、步驟s7、部署應用:將優化后的雷達目標識別模型部署到雷達系統中,應用于實際目標識別任務中。
10、優選的,所述步驟s1中實地測量是指在實際環境中,通過雷達設備對目標物進行直接觀測和測量,獲取目標的雷達特征數據,具體包括以下步驟:
11、步驟s11、目標選擇:根據雷達系統的應用需求,選擇合適的目標物,確保選擇的目標具有代表性,能夠覆蓋不同類型和尺寸的目標;
12、步驟s12、測量環境選擇:選擇多種典型的測量環境,確保在不同地形和氣候條件下進行數據采集;
13、步驟s13、數據采集過程:將目標物置于預定位置,確保目標在雷達覆蓋范圍內;根據測量需求設置雷達設備的參數,具體為頻率、波束寬度、發射功率、掃描模式;啟動雷達設備,對目標進行連續掃描,記錄目標的反射信號、距離、速度、方位角特征數據;
14、步驟s14、數據標注與存儲:對采集到的雷達數據進行標注,記錄測量環境、目標類型、測量條件信息,將數據存儲到數據庫中,確保數據的完整性和可追溯性。
15、優選的,所述步驟s2中仿真數據生成是利用計算機仿真技術,根據實際環境中的目標特征數據,創建多種環境下的目標雷達數據,以彌補實地測量的不足,具體步驟如下:
16、步驟s21、仿真環境搭建
17、環境建模:使用專業仿真軟件搭建各種典型環境的三維模型,具體環境包括平原、山地、城市、海洋,確保環境模型的真實感和多樣性;氣象條件設置:在仿真環境中加入各種氣象條件,具體為晴天、雨天、霧天、雪天,通過調整仿真參數,模擬不同天氣對雷達信號傳播的影響,具體為衰減、散射和折射效應;時間參數設置:設置不同的時間段參數,白天、夜晚、黃昏,模擬不同光照條件對雷達信號的影響;
18、步驟s22、目標建模
19、目標物理特征建模:根據實地測量獲取的目標物理特征數據,建立三維目標模型,確保目標模型的幾何形狀、尺寸、材質等與實際目標一致;目標運動狀態建模:設置目標的運動狀態,包括靜止、勻速運動、加速運動,通過設置運動軌跡、速度、加速度參數,模擬目標在不同狀態下的雷達反射特征;
20、步驟s23、雷達系統仿真
21、雷達參數設置:根據實際雷達系統的參數,設置仿真雷達系統的發射頻率、波束寬度、發射功率、接收靈敏度;雷達信號傳播建模:使用射線追蹤法、電磁場仿真方法,模擬雷達信號在不同環境中的傳播路徑和特性,計算雷達信號的反射、散射和衰減;目標雷達特征仿真:通過仿真雷達系統對目標進行掃描,生成目標的雷達回波數據,包括距離、速度、方位角、雷達反射截面特征;
22、步驟s24、數據生成與處理
23、多樣化數據生成:通過改變仿真環境、氣象條件、目標狀態等參數,生成多樣化的目標雷達仿真數據,確保數據的豐富性和代表性;數據格式轉換:將仿真生成的雷達數據轉換為標準數據格式,便于后續的數據處理和模型訓練;數據驗證與修正:將生成的仿真數據與實際測量數據進行比較,驗證仿真數據的準確性和一致性,對存在偏差的數據進行修正,確保仿真數據的可靠性;
24、步驟s25、數據庫建立
25、數據存儲:將生成的仿真數據存儲到專用數據庫中,按環境類型、目標類型、氣象條件分類存儲,便于檢索和使用;數據標注:對每條仿真數據進行詳細標注,包括環境信息、目標信息、仿真參數,確保數據的可追溯性和可用性。
26、優選的,所述步驟s3中從仿真數據和實際數據中提取目標的特征信息的具體步驟如下:
27、步驟s31、數據預處理
28、數據清洗:對仿真數據和實際數據進行清洗,去除噪聲和異常值,確保數據的質量和一致性;數據標準化:對清洗后的數據進行標準化處理,具體采用歸一化、均值方差標準化方法進行處理;
29、步驟s32、形狀特征提取
30、目標輪廓檢測:使用邊緣檢測算法從數據預處理后的雷達圖像中提取目標的輪廓,獲取目標的形狀特征;形狀描述符計算:計算目標的形狀描述符,具體為周長、面積、緊致度、形狀矩,描述目標的幾何形狀;
31、步驟s33、尺寸特征提取
32、尺寸測量:從輪廓檢測結果中測量目標的尺寸特征,具體為長度、寬度、高度,上述尺寸特征通過目標的邊界框或最小外接矩形進行計算;比例關系分析:分析目標的各個尺寸之間的比例關系;
33、步驟s34、速度特征提取
34、多幀數據分析:通過分析連續多幀雷達數據,計算目標在不同時間點的位置變化,從而估算目標的速度特征;速度分量計算:將目標的速度分解為水平速度、垂直速度、徑向速度等分量;
35、步驟s35、雷達反射特征提取
36、雷達反射截面:計算目標的雷達反射截面;散射矩陣:計算目標的散射矩陣,描述目標對入射電磁波的散射特性,包括不同極化狀態下的散射特征;頻域特征:使用傅里葉變換等方法,將雷達信號轉換到頻域,提取頻域特征;
37、步驟s36、數據庫建立
38、特征數據庫構建:將提取的特征信息存儲到特征數據庫中,包括目標的形狀、尺寸、速度、雷達反射特征,按目標類型、環境類型等分類存儲,便于檢索和使用。
39、優選的,所述步驟s5中模型訓練使用預處理后的特征數據訓練雷達目標識別模型,具體過程如下:
40、步驟s51、數據準備
41、訓練集、驗證集、測試集劃分:將數據集分為訓練集,用于模型訓練、驗證集,用于模型調參和測試集,用于模型評估,具體的比例是70%訓練集,15%驗證集,15%測試集;
42、步驟s52、模型選擇
43、深度學習模型:選用卷積神經網絡處理圖像數據和雷達回波數據,通過卷積層提取特征;模型架構設計:根據特征數據的維度設計輸入層;隱藏層包括卷積層、池化層、全連接層,具體層數和參數根據任務需求設計;根據目標類別數設計輸出層,具體使用softmax激活函數進行分類;
44、步驟s53、模型訓練
45、損失函數:使用交叉熵損失函數用于步驟s52中選擇的模型分類任務,衡量預測概率分布與真實分布的差異;優化器:通過梯度下降算法進行反向傳播計算梯度,更新模型參數;
46、步驟s54、模型部署
47、將訓練好的模型參數保存到文件中,便于后續加載和使用。
48、與現有技術相比,本發明的有益效果是:本發明通過深度學習算法能夠自動提取和學習復雜特征,適用于處理高維度和非線性數據。通過訓練雷達目標識別模型,可以實現對多種目標類型的高精度識別,減少誤報和漏報的發生;預處理后的特征數據能夠去除噪聲和干擾,增強模型的魯棒性。深度學習模型通過學習大量樣本數據,能夠適應不同的環境和條件,提高識別系統在復雜環境下的表現;傳統雷達目標識別依賴于人工設計特征,深度學習算法能夠自動從原始數據中提取有用特征,減少了特征工程的工作量,提高了系統開發的效率和靈活性;訓練好的雷達目標識別模型可以應用于多種場景,如軍事監測、交通監控、無人駕駛等。不同場景下的目標識別需求可以通過模型的微調和適配來實現;通過自動化和高效的目標識別,可以減少人工干預和人為錯誤,降低操作成本。同時,減少了對專家人工標注和特征設計的依賴,節省了人力資源投入。
- 還沒有人留言評論。精彩留言會獲得點贊!