一種目標框修正方法、裝置、車輛及存儲介質與流程
本技術涉及自動駕駛,具體是涉及一種目標框修正方法、裝置、車輛及存儲介質。
背景技術:
1、在自動駕駛技術領域,本車利用攝像頭、激光雷達和毫米波雷達等傳感器采集位于本車前方的目標車輛的數據信息,并根據該數據信息生成目標框,用該目標框表征目標車輛所占據的道路區域,而該目標框的尺寸可能會大于目標車輛所占據道路的實際區域尺寸,因此需要對該目標框進行修正,以使得修正之后的目標框匹配于目標車輛實際占據的道路區域。之后本車根據修正之后的目標框進行移動,以避免本車撞擊到目標車輛。現有技術使用不同的傳感器采集同一目標車輛的數據信息,以針對同一目標車輛得到多個目標框,多個目標框相互融合,以實現修正目標框的目的。由于多個目標框數據來源于不同的傳感器,而不同的傳感器會涉及到不同維度的坐標,數據在不同維度上的坐標系上進行轉換,會導致部分維度上的數據信息丟失,以融合的方式修正目標框會降低修正之后的目標框的準確度。
2、綜上所述,現有技術修正目標框的準確性較低。
3、因此,現有技術還有待改進和提高。
技術實現思路
1、本技術提供了一種目標框修正方法、裝置、車輛及存儲介質,以解決現有技術修正目標框的準確性較低的技術問題。
2、為實現上述目的,本技術采用了以下技術方案:
3、本技術第一方面實施例提供一種目標框修正方法,包括以下步驟:
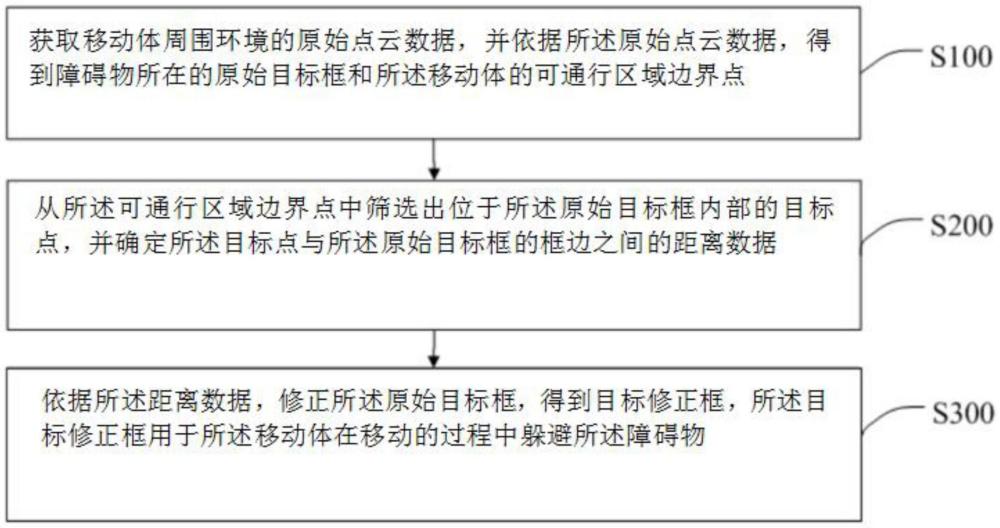
4、獲取移動體周圍環境的原始點云數據,并依據所述原始點云數據,得到障礙物所在的原始目標框和所述移動體的可通行區域邊界點;
5、從所述可通行區域邊界點中篩選出位于所述原始目標框內部的目標點,并確定所述目標點與所述原始目標框的框邊之間的距離數據;
6、依據所述距離數據,修正所述原始目標框,得到目標修正框,所述目標修正框用于所述移動體在移動的過程中躲避所述障礙物。
7、根據上述技術手段,本技術實施例首先采集移動體周圍環境的原始點云數據,并將該原始點云數據劃分成障礙物所在的原始目標框和移動體可以通行的區域的邊界點,然后從該邊界點中篩選出位于原始目標框內的目標點,并計算目標點與原始目標框的框邊之間的距離,最后根據該距離修正或調整原始目標框的大小,以得到目標修正框。從上述分析,本技術的原始目標框和可通行區域邊界點都是來源于同一原始點云數據,同一原始點云數據的坐標系維度必然相同,因此不涉及坐標系的轉換,進而提高了所得到的目標修正框的準確性。
8、可選地,在本技術的一個實施例中,所述獲取移動體周圍環境的原始點云數據,并依據所述原始點云數據,得到障礙物所在的原始目標框和所述移動體的可通行區域邊界點,包括:
9、通過設置在所述移動體上的激光雷達采集所述環境的原始點云數據;
10、對所述原始點云數據應用freespace算法,得到所述移動體的所述可通行區域邊界點,所述freespace算法用于識別所述移動體的位置;
11、對所述原始點云數據應用深度學習模型,得到所述原始目標框,所述深度學習模型用于識別所述障礙物。
12、根據上述技術手段,本技術實施例激光雷達具有多束光線,通過多束光線采集原始點云數據,能夠提高所采集到的原始點云數據的準確性,而且freespace算法適用于提取可通行區域邊界點,深度學習模型適用于生成目標框。
13、可選地,在本技術的一個實施例中,所述從所述可通行區域邊界點中篩選出位于所述原始目標框內部的目標點,包括:
14、將每個所述可通行區域邊界點和位于所述原始目標框的同一個框邊上兩個角點進行組合,得到若干組三點集合;
15、計算每組所述三點集合的叉積結果,并依據每個所述可通行區域邊界點所對應的所述叉積結果,從所有所述可通行區域邊界點中篩選出位于所述原始目標框內部的各個目標點。
16、根據上述技術手段,本技術實施例在篩選目標點時,考慮了原始目標框每條框邊上的角點,以使得篩選出來的目標點位于框邊的內側,從而使得該目標點就是原始目標框的內部點。
17、可選地,在本技術的一個實施例中,所述計算每組所述三點集合的叉積結果,并依據每個所述可通行區域邊界點所對應的所述叉積結果,從所有所述可通行區域邊界點中篩選出位于所述原始目標框內部的各個目標點,包括:
18、計算每個所述三點集合的叉積結果,并將所有所述叉積結果兩兩組合,得到每個所述可通行區域邊界點所對應的若干叉積結果組;
19、計算每個所述叉積結果組所對應的乘積結果;
20、依據每個所述可通行區域邊界點所對應的所述乘積結果,從所有所述可通行區域邊界點中篩選出位于所述原始目標框內部的目標點。
21、根據上述技術手段,本技術實施例通過叉積運算篩選目標點,能夠提高篩選目標點的效率。
22、可選地,在本技術的一個實施例中,所述依據所述第一乘積結果和所述第二乘積結果,從所有所述可通行區域邊界點中篩選出各個所述目標點,包括:
23、將所有所述乘積結果都大于或等于零所對應的可通行區域邊界點作為所述目標點。
24、根據上述技術手段,本技術實施例用所有乘積結果作為篩選目標點的限定條件,能夠更進一步提高所篩選出來的目標點的準確性。
25、可選地,在本技術的一個實施例中,所述確定所述目標點與所述原始目標框的框邊之間的距離數據,包括:
26、確定所述原始目標框的危險框邊,所述危險框邊為所述原始目標框的所有框邊中阻礙所述移動體移動的框邊;
27、確定各個所述目標點到所述危險框邊之間的最近距離,并將所述最近距離作為所述距離數據。
28、根據上述技術手段,本技術實施例將目標點與框邊之間的距離限定為目標點與危險框邊之間的距離,依據該距離修正原始目標框,以使得修正之后的目標框能夠讓移動體最大限度的躲避障礙物。
29、可選地,在本技術的一個實施例中,所述原始目標框為方形框,所述危險框邊包括所述方形框上構成并列設置的第一側框邊和第二側框邊,所述確定各個所述目標點到所述危險框邊之間的最近距離,包括:
30、確定各個所述目標點到所述第一側框邊的第一垂直距離;
31、從各個所述目標點所對應的所述第一垂直距離中,篩選出第一最近距離;
32、確定各個所述目標點到所述第二側框邊的第二垂直距離;
33、從各個所述目標點所對應的所述第二垂直距離中,篩選出第二最近距離,并將所述第一最近距離和所述第二最近距離作為最近距離。
34、根據上述技術手段,本技術實施例計算出了兩個最近距離,這兩個距離相互配合,能夠更好的修正目標框。
35、可選地,在本技術的一個實施例中,所述依據所述距離數據,修正所述原始目標框,得到目標修正框,包括:
36、獲取所述障礙物偏移所述移動體的偏移角度,以及獲取所述障礙物偏移所述移動體的偏移方向;
37、依據所述偏移方向、所述偏移角度、所述第一最近距離、所述第二最近距離,修正所述原始目標框,得到目標修正框。
38、根據上述技術手段,本技術實施例在修正目標框時考慮了偏移角度和偏移方向,從而能夠更好的修正目標框。
39、可選地,在本技術的一個實施例中,所述依據所述偏移方向、所述偏移角度、所述第一最近距離、所述第二最近距離,修正所述原始目標框,得到目標修正框,包括:
40、確定所述第一側框邊和所述第二側框邊之間的框邊寬度;
41、將所述邊界點寬度除以所述框邊寬度,得到寬度占比;
42、將所述框邊寬度減去所述第一最近距離再減去所述第二最近距離,得到邊界點寬度;
43、依據所述偏移方向、所述偏移角度、所述第一最近距離、所述第二最近距離、所述寬度占比,修正所述原始目標框,得到目標修正框。
44、根據上述技術手段,本技術實施例根據寬度占比修正目標框,能夠防止過度的修正目標框,從而提高了修正的準確度。
45、可選地,在本技術的一個實施例中,所述依據所述偏移方向、所述偏移角度、所述第一最近距離、所述第二最近距離、所述寬度占比,修正所述原始目標框,得到目標修正框,包括:
46、當所述偏移角度位于設定角度范圍時,依據所述偏移方向、所述第一最近距離、所述第二最近距離、所述寬度占比,縮小所述原始目標框,得到所述目標修正框。
47、根據上述技術手段,本技術實施例只對偏移角度位于設定角度范圍的障礙物的原始目標框進行修正,以防止對沒有修正必要的目標框進行修正,從而節省了移動體的計算資源。
48、本技術第二方面實施例提供一種目標框修正裝置,包括:
49、點云數據處理模塊,用于獲取移動體周圍環境的原始點云數據,并依據所述原始點云數據,得到障礙物所在的原始目標框和所述移動體的可通行區域邊界點;
50、點邊距離計算模塊,用于從所述可通行區域邊界點中篩選出位于所述原始目標框內部的目標點,并確定所述目標點與所述原始目標框的框邊之間的距離數據;
51、修正模塊,用于依據所述距離數據,修正所述原始目標框,得到最終目標框,所述目標修正框用于所述移動體在移動的過程中躲避所述障礙物。
52、本技術第三方面實施例提供一種車輛,所述車輛包括存儲器、處理器及存儲在所述存儲器中并可在所述處理器上運行的目標框修正程序,所述處理器執行所述目標框修正程序時,實現上述所述的目標框修正方法的步驟。
53、本技術第四方面實施例提供一種計算機可讀存儲介質,所述計算機可讀存儲介質上存儲有目標框修正程序,所述目標框修正程序被處理器執行時,實現上述所述的目標框修正方法的步驟。
54、本技術的有益效果:
55、(1)本技術實施例首先采集移動體周圍環境的原始點云數據,并將該原始點云數據劃分成障礙物所在的原始目標框和移動體可以通行的區域的邊界點,然后從該邊界點中篩選出位于原始目標框內的目標點,并計算目標點與原始目標框的框邊之間的距離,最后根據該距離修正或調整原始目標框的大小,以得到目標修正框。從上述分析,本技術的原始目標框和可通行區域邊界點都是來源于同一原始點云數據,同一原始點云數據的坐標系維度必然相同,因此不涉及坐標系的轉換,進而提高了所得到的目標修正框的準確性。
56、(2)本技術實施例只對偏移角度位于設定角度范圍的障礙物的原始目標框進行修正,以防止對沒有修正必要的目標框進行修正,從而節省了移動體的計算資源。
57、(3)本技術實施例將目標點與框邊之間的距離限定為目標點與危險框邊之間的距離,依據該距離修正原始目標框,以使得修正之后的目標框能夠讓移動體最大限度的躲避障礙物。
58、本技術附加的方面和優點將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本技術的實踐了解到。
- 還沒有人留言評論。精彩留言會獲得點贊!