一種融合誤差校正的聲納距離-角度聯合估計方法、裝置及設備
本發明屬于聲納信號處理,尤其涉及一種融合誤差校正的聲納距離-角度聯合估計方法、裝置及設備。
背景技術:
1、正交頻分復用(orthogonal?frequency?division?multiplexing,ofdm)聲納在軍事或民用目標定位中提供了有趣且有前景的應用前景。與傳統聲納系統相比,ofdm聲納對頻率偏移更加敏感。陣列不確定性和聲波傳播特性帶來的隨機相位誤差嚴重影響估計精度。
2、近年來,使用聲學通信信號的聲納探測由于其小的安裝空間、較低的實現成本和高頻譜效率受到了相當大的關注。隨著正交頻分復用(ofdm)技術在通信中的巨大成功,ofdm聲納系統已被接受為一種有希望的方案,以提高使用線性調頻(lfm)信號或調頻連續波(fmcw)信號的傳統聲納系統的性能。無論是用于軍事還是民用目的,目標定位都是聲納系統最重要的任務之一。ofdm系統中的聯合距離-角度估計已成為一個熱門話題。
3、基于ofdm系統,研究人員提出了各種距離-角度估計方法。多個信號分類(music)算法被應用于ofdm無線定位系統中,以估計每條路徑的到達角和到達時間(toa)。矩陣鉛筆(mp)法被提出用于ofdm通信系統中的角度和toa估計。近年來,music和通過旋轉不變技術估計信號參數(esprit)已被引入ofdm雷達系統的距離-角度估計中。對于ofdm信號,使用esprit和music方法的組合進行距離-角度估計。ofdm雷達系統的子空間高分辨率估計方法具有良好的準確性,但由于特征值分解和譜峰搜索,計算成本高昂。壓縮感知(cs)技術通過解決稀疏驅動的優化問題,使得從有限的測量中準確重建稀疏信號,進而為聯合距離-角度估計提供了新的思路。已經提出了基于cs的低復雜度ofdm雷達聯合距離-角度估計方法。通過構建冗余字典和求解優化問題,恢復超分辨率的距離-角度估計。
4、上述聯合距離-角度估計方法主要應用于空氣中的無線通信和雷達系統。然而,本技術討論的方案集中于主動聲納系統。聲納系統中的傳感器位置或固有參數并不完全準確,這會在每個陣列元件處引入未知的相位誤差。海洋中的聲波傳播特性,如海洋湍流和速度變化,使得聲納系統的實現面臨重大困難。為了滿足波長級角度估計的精度要求,陣列和傳播誤差不能被忽視。高效的相位誤差補償對聲納系統至關重要,因此提出了一些相位誤差補償方法。最大后驗(map)方法被提出用于在存在陣列誤差的情況下估計感興趣的信號,但所需的內存量和處理計算量過大。低復雜度的特征結構方法被提出用于估計角度和陣列誤差。基于cs的方法也被提出,通過解決稀疏信號和誤差的恢復優化來解決由未知誤差引起的測量失真問題。
5、接收到的信號是多目標回波的疊加,來自不同距離單元的目標回波會引起相互干擾,就像通信中的多路徑引起的符號間干擾(isi)一樣。參考在通信中添加循環前綴(cp)的ofdm技術,可以在ofdm聲納系統中抑制目標干擾。同時,ofdm對時間和頻率偏移非常敏感,特別是在存在傳播介質和陣列誤差的情況下,因此如何克服這一限制是ofdm聲納系統研究的主要方向之一。
技術實現思路
1、本發明的目的在于克服現有技術缺陷,提出了一種融合誤差校正的聲納距離-角度聯合估計方法、裝置及設備。
2、為了實現上述目的,本發明提出了一種融合誤差校正的聲納距離-角度聯合估計方法,包括:
3、對接收的正交頻分復用聲納信號進行預處理,去除接收信號的循環前綴和尾部樣本;
4、對預處理后的接收信號進行快速傅里葉變換,計算位移后的調制符號序列;
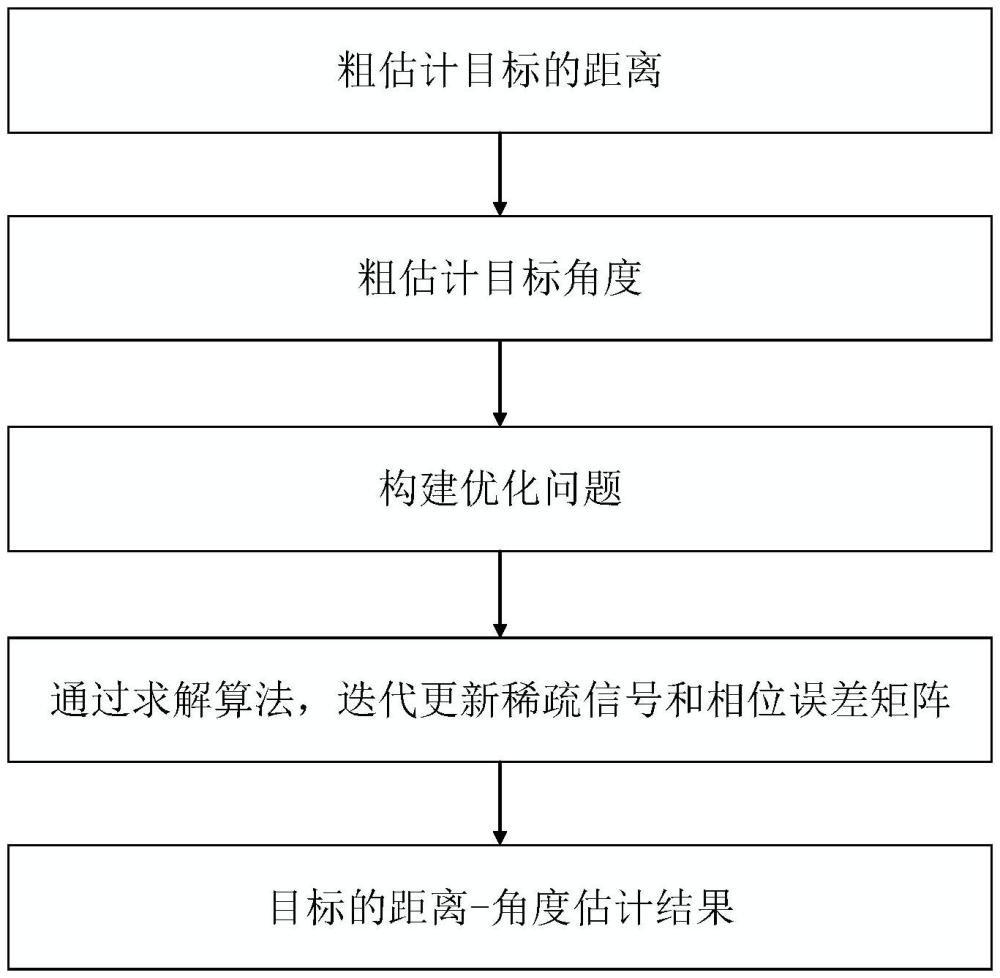
5、根據位移后的調制符號序列,利用多目標干擾抑制特性以及波束成形技術,得到目標的距離和角度的粗估計;
6、構建矩陣形式的優化問題,通過迭代算法,逐步更新稀疏信號和相位誤差矩陣,直到達到預定的收斂標準,得到目標的距離和角度估計結果。
7、優選的,所述正交頻分復用聲納中是包括m個陣列的等間距線陣,相鄰陣列的間距為d=λ/2,其中λ為信號波長,發射的正交頻分復用信號s(t)為:
8、
9、其中,n為子載波數,k為子載波序號,δf為子載波間隔,δf=b/n,b為帶寬,wk是通過二進制數據和正交幅度調制獲得的調制符號序列,j表示虛部,t表示時域。
10、優選的,所述正交頻分復用聲納中第m個陣列的接收信號gm(t)為:
11、
12、其中,a(r,θ)是目標的反射函數,r為離散距離集,θ為角度,exp[jem(θ)]表示相位誤差,c是光速。
13、優選的,所述位移后的調制符號序列wcp為:
14、
15、其中,ncp為循壞移位量。
16、優選的,所述目標的距離和角度的粗估計為:
17、
18、其中,a(n,q)為矩陣a的元素,n為第n個子載波數,q為第q個角度網格,ρr為距離分辨率,為粗估計的角度,為粗估計時延,繼而可得到粗估計距離,q為角度網格數量;
19、優選的,所述矩陣形式為:對第m個陣列元件執行n點傅里葉變換的矩陣形式,滿足下式:
20、y=wave+n
21、其中,矩陣y為測量數據,矩陣a和矩陣n分別對應目標系數和加性白高斯噪聲,矩陣v表示導向向量,矩陣e表示不同陣列元件的相位誤差項,矩陣w表示位移后的調制符號。
22、優選的,所述矩陣形式的優化問題為:
23、
24、其中,j(a,e)為目標函數,y=vec(y),a=vec(a),ze為字典矩陣,ρ表示正則化參數,分別為系數向量和相位誤差項的估計值。
25、優選的,所述通過迭代算法,逐步更新稀疏信號和相位誤差矩陣,直到達到預定的收斂標準,得到目標的距離和角度估計結果;包括:
26、步驟s1)l=0,分別初始化對應的系數向量和相位誤差項的估計值和
27、步驟s2)分別計算hessian矩陣通過求解下式更新
28、
29、通過下式更新角度估計
30、
31、其中,∠[·]表示復數的角度,ξm是一個m×m方陣,除第m個對角元素等于em所有元素都為零;(.)h為矩陣的共軛;為克羅內克積;
32、步驟s3)判斷若判斷結果為真,執行l+1,并轉至步驟s2);否則,轉至步驟s4);
33、步驟s4)輸出目標的距離估計和角度估計
34、另一方面,本發明提供了一種融合誤差校正的聲納距離-角度聯合估計裝置,包括:
35、預處理模塊,用于對接收的正交頻分復用聲納信號進行預處理,去除接收信號的循環前綴和尾部樣本;
36、計算模塊,用于對預處理后的接收信號進行快速傅里葉變換,計算位移后的調制符號序列;
37、粗估計模塊,用于根據位移后的調制符號序列,利用多目標干擾抑制特性以及波束成形技術,得到目標的距離和角度的粗估計;和
38、優化迭代模塊,用于構建矩陣形式的優化問題,通過迭代算法,逐步更新稀疏信號和相位誤差矩陣,直到達到預定的收斂標準,得到目標的距離和角度估計結果。
39、第三方面,本發明還提供了一種計算機設備,包括存儲器、處理器及存儲在存儲器上的計算機程序,所述處理器執行所述計算機程序以實現上述方法的步驟。
40、與現有技術相比,本發明的優勢在于:
41、本發明提出了一種新穎的ofdm聲納系統的距離-角度估計和相位誤差補償方法。由于傳感器位置不準確、系統內在參數、海洋湍流和速度變化,需要額外考慮相位誤差。利用ofdm聲納信號模型的結構并考慮相位誤差,優化問題恢復了高精度和低旁瓣的聯合距離-角度估計。在存在相位誤差和強噪聲的情況下,估計精度和計算效率得到了提高。新的ofdm聲納系統的聯合距離-角度估計方法在系統集成、水下目標檢測、定位和跟蹤等方面具有廣泛的應用前景,是聲納系統未來發展的有前景的研究課題。
- 還沒有人留言評論。精彩留言會獲得點贊!