無源物聯網設備的定位方法、設備、存儲介質和產品與流程
本技術涉及物聯網領域,尤其涉及一種無源物聯網設備的定位方法、設備、存儲介質和產品。
背景技術:
1、物聯網在互聯網和射頻識別(radio?frequency?identification,rfid)技術的推動下飛速發展,得到廣泛應用,旨在實現萬物互聯。隨著無源反向散射技術的發展,無源物聯網近年來逐漸興起,與有源物聯網相比,無源物聯網的傳感器和標簽可以將周圍可利用的無線信號轉換為工作所需能量,同時實現向目標節點的信息傳遞,解決了有源物聯網的傳感器需要電池供電而存在的制造成本和維護成本高的問題。
2、rfid技術除了可以用于對無源物聯網設備進行盤存之外,還可以用于對無源物聯網設備進行定位。這里,至少三個讀寫器通過分析無源物聯網設備發送的反向散射信號的信號強度和/或相位等特征信息,可以實現對射頻范圍的重疊區域內的無源物聯網設備進行定位。在相關技術中,考慮到讀寫器信號和無源物聯網設備信號之間的相互干擾,通常采用輪詢的方式對無源物聯網設備進行定位,即至少三個讀寫器分別依次對待檢測區域內的無源物聯網設備進行盤存,以實現對無源物聯網設備進行定位。
3、讀寫器對無源物聯網設備進行盤存時,讀寫器會依次接收到無源物聯網設備發送的16比特隨機數(random?numbers?16,rn16)信號和產品標識代碼(electronic?productcode,epc)信號,三個讀寫器對無源物聯網設備進行定位時,共讀取同一無源物聯網設備發送的rn16信號和epc信號各三次,顯然,相關技術中基于盤存流程的無源物聯網設備定位方法存在信號冗余,浪費通信資源,降低了定位效率;當待檢測區域內的無源物聯網設備較多時,每次盤存周期較長,若在定位周期內待定位的無源物聯網設備的位置和環境參數發生變化,則會影響各讀寫器分析得到的特征信息的一致性和準確性,進而降低定位精度。
技術實現思路
1、有鑒于此,本技術實施例提供了一種無源物聯網設備的定位方法、設備、存儲介質和產品,旨在提升多讀寫器覆蓋場景下無源物聯網設備的定位效率和定位精度。
2、本技術實施例的技術方案是這樣實現的:
3、第一方面,本技術實施例提供了一種無源物聯網設備的定位方法,應用于讀寫器組,所述方法包括:
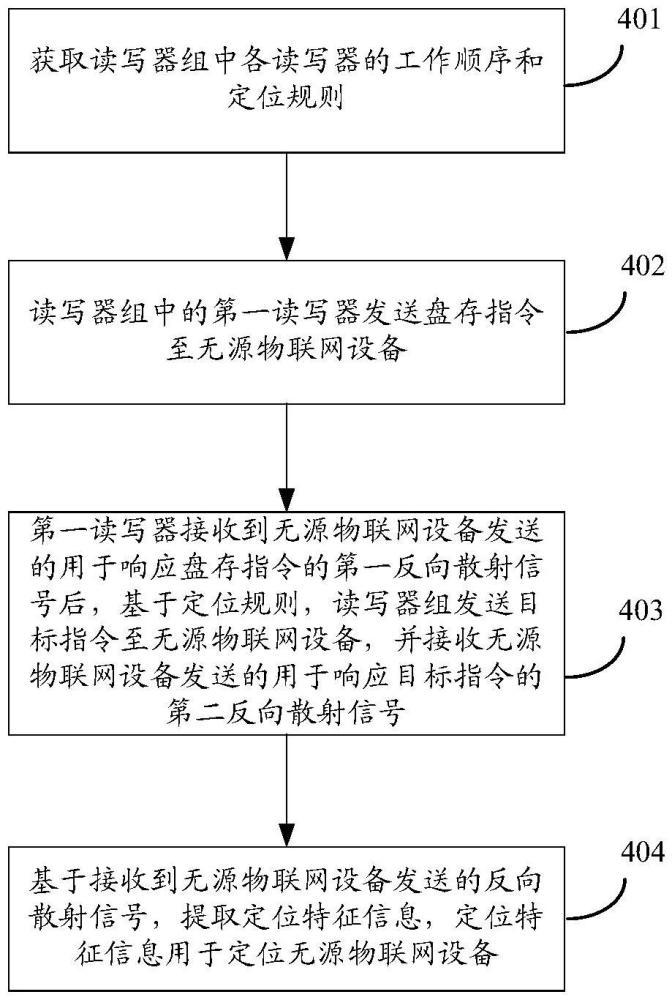
4、獲取所述讀寫器組中各讀寫器的工作順序和定位規則;
5、所述讀寫器組中的第一讀寫器發送盤存指令至無源物聯網設備;
6、所述第一讀寫器接收到所述無源物聯網設備發送的用于響應所述盤存指令的第一反向散射信號后,基于所述定位規則,所述讀寫器組發送目標指令至所述無源物聯網設備,并接收所述無源物聯網設備發送的用于響應所述目標指令的第二反向散射信號;
7、基于接收到所述無源物聯網設備發送的反向散射信號,提取定位特征信息,所述定位特征信息用于定位所述無源物聯網設備;
8、其中,所述讀寫器組還包括用于發送所述目標指令的第二讀寫器和第三讀寫器,所述第一讀寫器、所述第二讀寫器和所述第三讀寫器由所述各讀寫器的工作順序確定,所述目標指令包括:盤存定位指令或者接入確認指令。
9、上述方案中,所述獲取所述讀寫器組中各讀寫器的定位規則,包括:
10、獲取指示基于隨機數信號定位的第一定位規則;或者,
11、獲取指示基于產品標識代碼epc信號定位的第二定位規則;
12、其中,所述第一反向散射信號為響應所述盤存指令的第一隨機數信號,所述第二反向散射信號包括:響應所述盤存定位指令的隨機數信號或者響應所述接入確認指令的epc信號。
13、上述方案中,所述基于所述定位規則,所述讀寫器組發送目標指令至所述無源物聯網設備,并接收所述無源物聯網設備發送的用于響應所述目標指令的第二反向散射信號,包括:
14、若確定所述定位規則為所述第一定位規則,則所述讀寫器組發送所述盤存定位指令至所述無源物聯網設備,并接收所述無源物聯網設備發送的用于響應所述盤存定位指令的隨機數信號;
15、若確定所述定位規則為所述第二定位規則,則所述讀寫器組發送所述接入確認指令至所述無源物聯網設備,并接收所述無源物聯網設備發送的用于響應所述接入確認指令的epc信號。
16、上述方案中,所述讀寫器組發送所述盤存定位指令至所述無源物聯網設備,并接收所述無源物聯網設備發送的用于響應所述盤存定位指令的隨機數信號,包括:
17、所述第二讀寫器發送第一盤存定位指令至所述無源物聯網設備;
18、所述第二讀寫器接收用于響應所述第一盤存定位指令的第二隨機數信號;
19、所述第三讀寫器發送第二盤存定位指令至所述無源物聯網設備;
20、所述第三讀寫器接收用于響應所述第二盤存定位指令的第三隨機數信號。
21、上述方案中,所述第二讀寫器發送第一盤存定位指令至所述無源物聯網設備,包括:
22、所述第一讀寫器接收到所述第一隨機數信號后,所述第一讀寫器發送第一通知信息至所述第二讀寫器;基于所述第一通知信息,所述第二讀寫器發送所述第一盤存定位指令至所述無源物聯網設備;
23、所述第三讀寫器發送第二盤存定位指令至所述無源物聯網設備,包括:
24、所述第二讀寫器接收到所述第二隨機數信號后,發送第二通知信息至所述第三讀寫器;基于所述第二通知信息,所述第三讀寫器發送所述第二盤存定位指令至所述無源物聯網設備。
25、上述方案中,所述方法還包括:
26、確定所述讀寫器組中各讀寫器的工作順序后,所述第二讀寫器和所述第三讀寫器分別開始計時;
27、所述第二讀寫器發送第一盤存定位指令至所述無源物聯網設備,包括:
28、若所述第二讀寫器計時達到第一設定時長,則所述第二讀寫器發送所述第一盤存定位指令至所述無源物聯網設備;
29、所述第三讀寫器發送第二盤存定位指令至所述無源物聯網設備,包括:
30、若所述第三讀寫器計時達到第二設定時長,則所述第三讀寫器發送所述第二盤存定位指令至所述無源物聯網設備;
31、其中,所述第一設定時長小于所述第二設定時長。
32、上述方案中,所述基于接收到所述無源物聯網設備發送的反向散射信號,提取定位特征信息,包括:
33、基于接收到的所述第一隨機數信號、所述第二隨機數信號和所述第三隨機數信號,提取所述定位特征信息。
34、上述方案中,所述方法還包括:
35、獲取所述讀寫器組中各讀寫器的工作順序和所述定位規則后,生成會話標識,所述會話標識用于所述無源物聯網設備確認接收到的盤存定位指令;
36、其中,所述盤存指令、所述第一盤存定位指令和所述第二盤存定位指令均攜帶所述會話標識。
37、上述方案中,所述方法還包括:
38、基于所述第三隨機數信號,所述第三讀寫器發送接入確認指令至所述無源物聯網設備;
39、接收所述無源物聯網設備發送的用于響應所述接入確認指令的epc信號。
40、上述方案中,所述讀寫器組發送所述接入確認指令至所述無源物聯網設備,并接收所述無源物聯網設備發送的用于響應所述接入確認指令的所述epc信號,包括:
41、所述第一讀寫器發送第一接入確認指令至所述無源物聯網設備;
42、所述第一讀寫器接收用于響應所述第一接入確認指令的第一epc信號;
43、所述第二讀寫器發送第二接入確認指令至所述無源物聯網設備;
44、所述第二讀寫器接收用于響應所述第二接入確認指令的第二epc信號;
45、所述第三讀寫器發送第三接入確認指令至所述無源物聯網設備;
46、所述第三讀寫器接收用于響應所述第三接入確認指令的第三epc信號。
47、上述方案中,所述方法還包括:
48、基于所述第一隨機數信號,所述第一讀寫器獲取所述第一隨機數信號攜帶的隨機數,所述隨機數用于所述無源物聯網設備確認接收到的接入確認指令;
49、其中,所述第一接入確認指令、所述第二接入確認指令和所述第三接入確認指令均攜帶所述隨機數。
50、上述方案中,所述方法還包括:
51、所述第一讀寫器發送攜帶所述隨機數的通知信息至所述第二讀寫器和所述第三讀寫器;所述第二讀寫器和所述第三讀寫器接收到所述通知消息后,分別開始計時;
52、所述第二讀寫器發送第二接入確認指令至所述無源物聯網設備,包括:
53、若所述第二讀寫器計時達到第三設定時長,則所述第二讀寫器發送所述第二接入確認指令至所述無源物聯網設備;
54、所述第三讀寫器發送第三接入確認指令至所述無源物聯網設備,包括:
55、若所述第三讀寫器計時達到第四設定時長,則所述第三讀寫器發送所述第三接入確認指令至所述無源物聯網設備;
56、其中,所述第三設定時長小于所述第四設定時長。
57、上述方案中,所述第二讀寫器發送第二接入確認指令至所述無源物聯網設備,包括:
58、所述第一讀寫器接收到所述第一epc信號后,發送攜帶所述隨機數的第三通知消息至所述第二讀寫器;基于所述第三通知消息,所述第二讀寫器發送所述第二接入確認指令至所述無源物聯網設備;
59、所述第三讀寫器發送第三接入確認指令至所述無源物聯網設備,包括:
60、所述第二讀寫器接收到所述第二epc信號后,發送攜帶所述隨機數的第四通知消息至所述第三讀寫器;基于所述第四通知消息,所述第三讀寫器發送所述第三接入確認指令至所述無源物聯網設備。
61、上述方案中,所述基于接收到所述無源物聯網設備發送的反向散射信號,提取定位特征信息,包括:
62、基于接收到的所述第一epc信號、所述第二epc信號和所述第三epc信號,提取所述定位特征信息。
63、第二方面,本技術實施例提供了一種讀寫器組,所述讀寫器組至少包括三個讀寫器,所述讀寫器組還包括:處理器和用于存儲能夠在處理器上運行的計算機程序的存儲器,其中,所述處理器,用于運行計算機程序時,執行如第一方面所述方法的步驟。
64、第三方面,本技術實施例提供了一種存儲介質,所述存儲介質上存儲有計算機程序,所述計算機程序被處理器執行時,實現如第一方面所述方法的步驟。
65、第四方面,本技術實施例提供了一種計算機程序產品,包括計算機程序,所述計算機程序在被處理器執行時,實現如第一方面所述方法的步驟。
66、本技術實施例提供的無源物聯網設備的定位方法,包括:獲取讀寫器組中各讀寫器的工作順序和定位規則;讀寫器組中的第一讀寫器發送盤存指令至無源物聯網設備;第一讀寫器接收到無源物聯網設備發送的用于響應盤存指令的第一反向散射信號后,基于定位規則,讀寫器組發送目標指令至無源物聯網設備,并接收無源物聯網設備發送的用于響應目標指令的第二反向散射信號;基于接收到無源物聯網設備發送的反向散射信號,提取定位特征信息,定位特征信息用于定位無源物聯網設備;其中,讀寫器組還包括用于發送目標指令的第二讀寫器和第三讀寫器,第一讀寫器、第二讀寫器和第三讀寫器由各讀寫器的工作順序確定,目標指令包括:盤存定位指令或者接入確認指令。如此,本技術基于多個讀寫器之間的信息交互,在面向定位的無源物聯網設備的盤存過程中,簡化讀寫器與無源物聯網設備的交互過程,提升多讀寫器覆蓋場景下無源物聯網設備的定位效率和定位精度。
- 還沒有人留言評論。精彩留言會獲得點贊!