一種應用于驅動軸支架的深度在線檢測方法、系統及介質與流程
本發明涉及驅動軸支架的檢測,尤其是涉及一種應用于驅動軸支架的深度在線檢測方法、系統及介質。
背景技術:
1、隨著汽車行業的飛速發展,汽車零部件生產商不斷改進新技術,新技術的引入提高了生產效率,提升了產品品質,品質至上,高精度的要求,使企業在不斷激化的競爭中處于不敗之地,因而產品的品質在愈發激烈的競爭中受到所有企業的重點關注。
2、驅動軸支架是汽車重要安全零部件,其功用為固定導正驅動軸,充分認識其安全特性對支架的加工有著特別重要的作用,并應貫穿到整個制造過程的控制。驅動軸支架是固定傳動軸,精確定位。如果驅動軸支架出現任何尺寸精度及技術問題,會對汽車安全造成極大影響。
技術實現思路
1、鑒于以上問題,本發明提供了一種應用于驅動軸支架的深度在線檢測方法、系統及介質,不僅能夠對驅動軸支架的尺寸和精度進行準確的檢測,保證產品的品質,而且整個檢測過程,無需人工參與,降低人工參與導致誤差偏大的風險,進一步提高了驅動軸支架的產品合格率,保證車輛的安全行駛。
2、為了實現上述目的及其他相關目的,本發明提供的技術方案如下:
3、一種應用于驅動軸支架的深度在線檢測方法,所述方法包括:
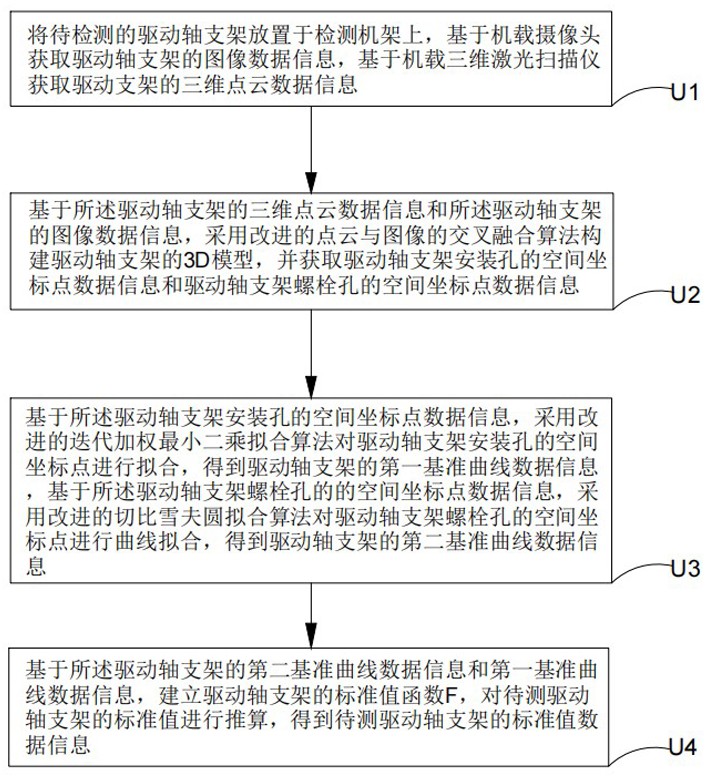
4、u1.將待檢測的驅動軸支架放置于檢測機架上,基于機載攝像頭獲取驅動軸支架的圖像數據信息,基于機載三維激光掃描儀獲取驅動軸支架的三維點云數據信息;
5、u2.基于所述驅動軸支架的三維點云數據信息和所述驅動軸支架的圖像數據信息,采用改進的點云與圖像的交叉融合算法構建驅動軸支架的3d模型,并獲取驅動軸支架安裝孔的空間坐標點數據信息和驅動軸支架螺栓孔的空間坐標點數據信息;
6、u3.基于所述驅動軸支架安裝孔的空間坐標點數據信息,采用改進的迭代加權最小二乘擬合算法對驅動軸支架安裝孔的空間坐標點進行擬合,得到驅動軸支架的第一基準曲線數據信息,基于所述驅動軸支架螺栓孔的空間坐標點數據信息,采用改進的切比雪夫圓擬合算法對驅動軸支架螺栓孔的空間坐標點進行曲線擬合,得到驅動軸支架的第二基準曲線數據信息;
7、u4.基于所述驅動軸支架的第二基準曲線數據信息和第一基準曲線數據信息,建立驅動軸支架的標準值函數f,對待測驅動軸支架的標準值進行推算,得到待測驅動軸支架的標準值數據信息。
8、進一步的,在步驟u2中,所述采用改進的點云與圖像的交叉融合算法構建驅動軸支架的3d模型包括:
9、u21.基于所述驅動軸支架的三維點云數據信息,建立驅動軸支架的內部點云序列函數g1,
10、
11、其中,x為驅動軸支架的三維點云數據信息,α和β為三維點云的序列優化參數,對驅動軸支架的三維點云進行序列化表征,得到驅動軸支架的三維點云序列數據信息;
12、u22.基于所述驅動軸支架的圖像數據信息,建立驅動軸支架的內部圖像序列函數g2,
13、
14、其中,y為驅動軸支架的圖像數據信息,σ1和σ2為圖像數據的序列決定因子,對驅動軸支架的圖像數據進行序列化表征,得到驅動軸支架的圖像序列數據信息;
15、u23.基于所述驅動軸支架的圖像序列數據信息和所述驅動軸支架的三維點云序列數據信息,建立點云與圖像的交叉融合函數h,
16、
17、其中,a為驅動軸支架的圖像序列數據信息,b為驅動軸支架的三維點云序列數據信息,λ1,λ2和λ3為驅動軸支架的交叉融合優化常量參數,a為圖像到像素的平移矩陣,b為圖像到像素的旋轉矩陣,對驅動軸支架的圖像和點云進行交叉融合,并構建驅動軸支架的3d模型。
18、進一步的,所述驅動軸支架的交叉融合優化常量參數λ1,λ2和λ3的約束條件為,
19、
20、進一步的,在步驟u3中,所述采用改進的迭代加權最小二乘擬合算法對驅動軸支架安裝孔的空間坐標點進行擬合包括:
21、u311.基于所述驅動軸支架安裝孔的空間坐標點數據信息,建立驅動軸支架的空間坐標點的特征點提取函數q,
22、
23、其中,q為驅動軸支架安裝孔的空間坐標點數據信息,δ為特征提取因子,得到驅動軸支架安裝孔的空間特征坐標點數據信息;
24、u312.基于所述驅動軸支架安裝孔的空間特征坐標點數據信息,建立驅動軸支架的迭代加權最小二乘擬合函數w,
25、
26、其中,ci為驅動軸支架安裝孔的第i個空間特征坐標點數據信息,η1,η2和η3為驅動軸支架安裝孔的曲線擬合因子,n為正整數;
27、u313.基于所述驅動軸支架的迭代加權最小二乘擬合函數w,對驅動軸支架安裝孔的空間坐標點進行擬合,得到驅動軸支架的第一基準曲線數據信息。
28、進一步的,所述驅動軸支架安裝孔的曲線擬合因子η1,η2和η3分別為,
29、
30、
31、其中,ci為驅動軸支架安裝孔的第i個空間特征坐標點數據信息。
32、進一步的,在步驟u3中,所述采用改進的切比雪夫圓擬合算法對驅動軸支架螺栓孔的空間坐標點進行曲線擬合包括:
33、u321.基于所述驅動軸支架螺栓孔的空間坐標點數據信息,建立驅動軸支架螺栓孔的聚類函數p,
34、
35、其中,dj為驅動軸支架螺栓孔的第j個空間坐標點數據信息,j為樣本容量,d0為驅動軸支撐架螺栓孔的中心坐標點,ρj為驅動軸支架螺栓孔的聚類分析因子,對驅動軸支撐架螺栓孔的空間坐標點進行聚類分析,得到聚類分析后的驅動軸支架螺栓孔的空間坐標數據信息;
36、u322.基于所述聚類分析后的驅動軸支架螺栓孔的空間坐標數據信息,建立驅動軸支架螺栓孔的切比雪夫圓擬合函數r,
37、
38、其中,r為聚類分析后的驅動軸支架螺栓孔的空間坐標數據信息,θ1,θ2和θ3為驅動軸支架螺栓孔的擬合因子;
39、u323.基于所述驅動軸支架螺栓孔的切比雪夫圓擬合函數r,對驅動軸支架螺栓孔的空間坐標點進行曲線擬合,得到驅動軸支架的第二基準曲線數據信息。
40、進一步的,所述驅動軸支架螺栓孔的擬合因子θ1,θ2和θ3分別為,
41、
42、
43、
44、其中,r為聚類分析后的驅動軸支架螺栓孔的空間坐標數據信息。
45、進一步的,所述驅動軸支架的標準值函數f為,
46、
47、其中,f1為驅動軸支架第一基準曲線數據信息,f2為驅動軸支架第二基準曲線數據信息,γ1,γ2和γ3為驅動軸支架的標準常量參數;并設置預設閾值,若所述待測驅動軸支架的標準值數據信息超過預設閾值則不合格,若所述待測驅動軸支架的標準值數據信息小于預設閾值則合格。
48、為了實現上述目的及其他相關目的,本發明還提供了一種應用于驅動軸支架的深度在線檢測系統,包括計算機設備,該計算機設備被編程或配置以執行任意一項所述的應用于驅動軸支架的深度在線檢測方法的步驟。
49、為了實現上述目的及其他相關目的,本發明還提供了一種計算機可讀存儲介質,該計算機可讀存儲介質上存儲有被編程或配置以執行任意一項所述的應用于驅動軸支架的深度在線方法的計算機程序。
50、本發明具有以下積極效果:
51、1.本發明通過采用點云與圖像的交叉融合算法構建驅動軸支架的3d模型,并結合采用改進的迭代加權最小二乘擬合算法對驅動軸支架安裝孔的空間坐標點進行擬合和采用改進的切比雪夫圓擬合算法對驅動軸支架螺栓孔的空間坐標點進行曲線擬合,不僅能夠精確地對驅動軸支架進行分析,保證驅動軸支架各個部分的尺寸和精度的準確性,而且采用第一基準曲線和第二基準曲線對驅動軸支架的關鍵點進行表征,提高了驅動軸支架檢測精度,從而保證產品的合格率。
52、2.本發明通過建立驅動軸支架的標準值函數f,對待測驅動軸支架的標準值進行推算,不僅能夠便捷性地對每個驅動軸支架進行檢測,而且整個檢測過程,無需人工參與,降低人工參與導致誤差偏大的風險,進一步提高了驅動軸支架的產品合格率,保證車輛的安全行駛。
- 還沒有人留言評論。精彩留言會獲得點贊!