基于不同調制深度的激光相調干涉直線度與位移測量的裝置及方法
本發明涉及一種以采用光學方法為特征的計量設備及方法,尤其是涉及一種基于不同調制深度的激光相調干涉直線度與位移測量的裝置及方法。
背景技術:
1、精密線性導軌是計算機數控機床和坐標測量機等精密制造和測量設備的關鍵運動部件,作為精密線性導軌的主要性能指標,直線度結合其他自由度參數直接影響精密設備的精度,因此對高精度直線度測量儀的需求也日益增長。目前高精度直線度測量方法主要分為激光準直法、激光光柵衍射法和激光干涉法。與激光準直法、激光光柵衍射法等直線度測量方法相比,激光干涉直線度測量方法具有測量精度高、靈敏度高、穩定性好以及測量范圍大的優點。但直線度干涉儀一般僅能實現被測對象直線度誤差這一個自由度參數的檢測。針對這一問題,本課題組的發明專利(專利號:cn201811569945.x)公開了一種渥拉斯頓棱鏡移動式激光干涉直線度及位移同時測量裝置,通過半透射半反射平面鏡和渥拉斯頓棱鏡的組合,在一套激光干涉裝置中實現了直線度及位移的同時測量,同時利用渥拉斯頓棱鏡作為測量鏡對轉角誤差不敏感的特點,降低了被測對象轉角誤差對直線度誤差測量結果的影響。然而,該方案通過分別檢測單個直線度測量光束光程變化來獲取直線度誤差,提高了光路的復雜程度,采用多個探測器引入了額外的測量誤差,且位移測量結果受測量鏡轉角誤差影響。
技術實現思路
1、為了解決背景技術中存在的問題,本發明的目的在于提供了一種基于不同調制深度的激光相調干涉直線度與位移測量的裝置及方法,該測量系統以半透半反平面鏡和渥拉斯頓棱鏡為測量鏡,利用不同調制深度的兩束直線度測量光束、位移測量和參考光束形成多路相位調制干涉信號,直接從兩束直線度測量光束光程變化差獲取直線度誤差,避免了分別檢測單個直線度測量光束光程變化而引入的額外測量誤差,并利用波前差分感測獲得測量鏡轉角誤差,對位移測量結果進行補償,提高了直線度誤差與位移的測量精度。
2、本發明解決其技術問題所采用的技術方案是:
3、一、一種基于不同調制深度的激光相調干涉直線度與位移測量裝置:
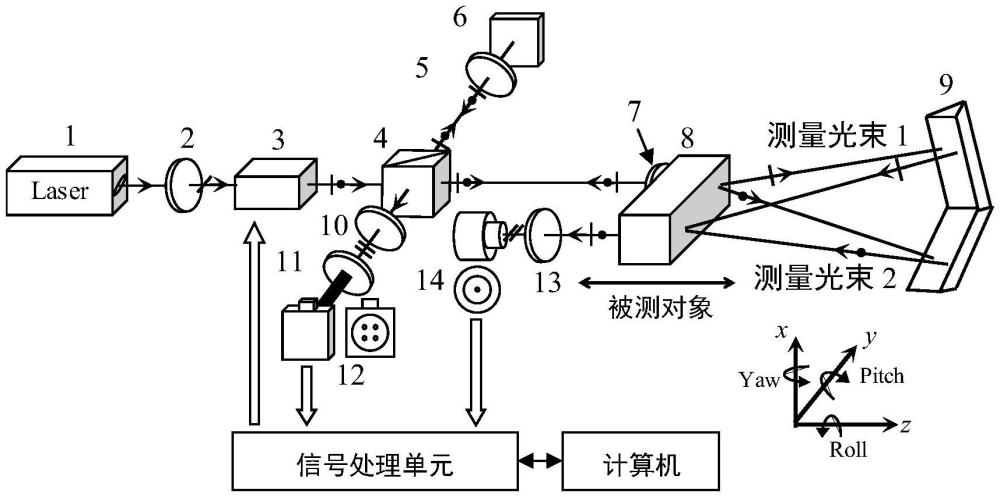
4、裝置包括單頻激光器、第一偏振片、電光相位調制器、分光棱鏡、四分之一波片、平面鏡、半透半反平面鏡、渥拉斯頓棱鏡、反射鏡、第二偏振片、透鏡、集成四光電探測器、第三偏振片和光電探測器;單頻激光器輸出激光光束,激光光束被第一偏振片和電光相位調制器調制后入射到分光棱鏡發生反射和透射的分光;反射光束作為位移參考光束,經四分之一波片入射到平面鏡發生反射進而逆反回到分光棱鏡發生透射;透射分光光束作為測量光束,入射到由半透半反平面鏡和渥拉斯頓棱鏡組成的測量鏡產生一束反射的位移測量光束和兩束透射的直線度測量光束,一束反射的位移測量光束逆反回到分光棱鏡發生反射,并和逆反回到分光棱鏡發生透射的位移參考光束一起再依次經第二偏振片、透鏡后入射到集成四光電探測器被探測接收;兩束透射的直線度測量光束入射到由上下直角棱鏡組成的反射鏡進而再入射到渥拉斯頓棱鏡發生透射,透射出渥拉斯頓棱鏡的直線度測量光束經第三偏振片后被光電探測器探測接收。
5、兩束直線度測量光束組成渥拉斯頓型干涉儀,位移測量光束與位移參考光束組成邁克爾遜型干涉儀。
6、所述的激光光束經第一偏振片調制后被轉換為線偏振光束,在經電光相位調制器調制后形成包含p線偏振光束和s線偏振光束的偏振光束;偏振光束被分光棱鏡透射和反射而分成兩束,被分光棱鏡反射的光束作為位移參考光束,經四分之一波片透射和平面鏡反射后逆反后,p線偏振光束和s線偏振光束均以偏振方向分別垂直于自身的原偏振方向地入射回到分光棱鏡再發生透射。
7、被分光棱鏡透射的光束作為直線度測量光束,先透射過半透半反平面鏡后,再入射通過渥拉斯頓棱鏡的一側分成兩束正交的線偏振光束,即分為p偏振光束和s偏振光束,兩束線偏振光束由上下直角棱鏡組成的反射鏡反射,返回到渥拉斯頓棱鏡的另一側并重組,重組的兩束光束通過第三偏振片后發生干涉,到達光電探測器。
8、由半透半反平面鏡和渥拉斯頓棱鏡組成的所述測量鏡安裝在被測對象上,隨被測對象移動和旋轉。
9、所述電光相位調制器、集成四光電探測器和光電探測器均經信號處理單元和計算機通訊連接。
10、經電光相位調制器調制后輸出的p線偏振光束和s線偏振光束具有不同調制深度,p線偏振光束和s線偏振光束的調制深度比例為1:3。
11、二、一種激光相調干涉直線度與位移測量裝置的測量方法:
12、方法過程具體為:
13、單頻激光器、第一偏振片、電光相位調制器、分光棱鏡、四分之一波片、平面鏡、半透半反平面鏡、渥拉斯頓棱鏡、反射鏡、第二偏振片、透鏡、集成四光電探測器、第三偏振片和光電探測器
14、1)將由半透半反平面鏡和渥拉斯頓棱鏡組成的測量鏡安裝在被測對象所在的運動平臺上;
15、2)直線度誤差及其位置的測量是以半透半反平面鏡和渥拉斯頓棱鏡組成的測量鏡為感測單元,通過第三偏振片將兩束直線度測量光束均被轉換為相對于光學元件所在光路平面呈45°的線偏振光束,兩束線偏振光束相互干涉后通過光電探測器,經分析處理得到兩束直線度測量光束運動前后位置的相位差
16、回到分光棱鏡的位移測量光束和位移參考光束分別被第二偏振片的轉換為垂直于光學元件所在光路平面的線偏振光束,兩束線偏振光束相互干涉后通過集成四光電探測器探測,經分析處理得到位移測量光束的運動前后位置的相位差
17、3)根據光電探測器和集成四光電探測器探測得到的結果進行處理獲得直線度誤差和位移;
18、4)根據集成四光電探測器探測到的信號處理獲得被測對象的偏擺角和俯仰角,再根據被測對象的偏擺角和俯仰角對步驟3)獲得的被測對象的位移進行補充,獲得最終的被測對象的準確位移。
19、所述步驟3)中,被測對象的直線度誤差δh及相對于初始位置的位移s分別按照以下公式計算獲得:
20、直線度誤差:
21、位移:
22、式中,λ是單頻激光器輸出激光光束的激光波長,θ是1/2渥拉斯頓棱鏡分束角度。
23、所述步驟4)具體為:
24、4.1)轉角誤差的測量以由半透半反平面鏡和渥拉斯頓棱鏡構成的測量鏡為感測單元,根據集成四光電探測器探測到的信號作為感測單元旋轉前后的信號,按照以下公式得到被測對象運動過程中的轉角,表示為:
25、偏擺角:
26、俯仰角:
27、式中,δl1-2為旋轉前后經信號處理后得到的集成四光電探測器橫向相鄰兩個探頭之間探測到的位移差,δl1-3為旋轉前后經信號處理后得到的集成四光電探測器縱向相鄰兩個探頭之間探測到的位移差,d1、d2分別表示集成四光電探測器橫向相鄰兩個探頭中心之間的距離和縱向相鄰兩個探頭中心之間的距離;
28、4.2)根據被測對象的偏擺角和俯仰角,然后對位移的測量結果按以下公式進行補償,獲得補償后的位移s’:
29、補償后的位移:
30、式中,s0表示半透半反平面鏡到分光棱鏡之間的光軸距離,s1表示分光棱鏡到集成四光電探測器之間的距離,hx和hy分別表示半透半反平面鏡上測量光束的中心到半透半反平面鏡旋轉中心在x軸和y軸方向上距離。
31、本發明的單頻激光器輸出線偏振光束經電光相位調制器調制后,進入由半透半反平面鏡和渥拉斯頓棱鏡組成的感測單元,產生兩束直線度測量光束和一束位移測量光束,分別形成渥拉斯頓型干涉儀和邁克爾遜型干涉儀,同時測得直線度誤差與位移。
32、本發明利用不同調制深度的兩束直線度測量光束、位移測量和參考光束形成多路相位調制干涉信號,直接從兩束直線度測量光束光程變化差獲取直線度誤差,避免了分別檢測單個直線度測量光束光程變化而引入的額外測量誤差,并利用波前差分感測獲得測量鏡轉角誤差,對位移測量結果進行補償,提高了直線度誤差與位移的測量精度。
33、本發明具有的有益效果是:
34、1)該測量方法采用電光相位調制器調制激光光束,產生不同調制深度的兩束直線度測量光束,直接從兩束直線度測量光束的光程變化之差獲取直線度誤差,避免了分別檢測單個直線度測量光束光程變化而引入的額外測量誤差,提高了直線度誤差的測量穩定性和精度;
35、2)該測量方法充分利用了高精度激光干涉儀來實現多自由度參數測量,采用激光相調干涉方法實現了直線度誤差、位移、偏擺角和俯仰角四個自由度參數的測量;
36、3)該測量方法補償了直線度誤差與位移同時測量過程中被測對象轉角誤差對位移測量結果的影響,提高了位移的測量精度,完善了激光相調干涉直線度誤差及其位置的測量方法。
37、本發明主要適用于超精密機械加工、微光機電系統、集成電路芯片制造和精密儀器等技術領域所涉及的精密工作臺及精密導軌的直線度、位移以及其他多自由度運動參數的同時檢測。
- 還沒有人留言評論。精彩留言會獲得點贊!