副像偏離值測量方法及測量裝置與流程
本技術涉及玻璃生產,尤其涉及一種副像偏離值測量方法及測量裝置。
背景技術:
1、隨著車輛的社會化和私家車的大量發展,汽車玻璃的安全保障作用越來越受到全社會的重視;汽車風擋玻璃作為汽車安全系統的重要組成部分之一,已經不只是一個遮風擋雨的工具,它隨時關系到駕駛員和乘客的安全,因此需要對風擋玻璃的副像偏離情況進行檢測。副像偏離是指當玻璃兩個表面不平行時,在一定的光照條件下,通過玻璃看物體時,除了看到主像還會看到一個或多個副像,副像與主像之間形成的夾角稱為副像偏離角,如果副像偏離較大,駕駛員就會產生錯覺,易發生交通事故。
2、目前,較為常見的檢測方式為人工測量,將被檢測的玻璃放在中間,玻璃兩側分別放置準直望遠鏡和光源儀,通過準直望遠鏡觀察光源照射在玻璃上產生的主像和副像,并利用準直望遠鏡的極坐標對應計算該玻璃的副像偏離。
3、但是,人工檢測方式不僅人工標記過程存在誤差,還大大降低了檢測速率,甚至致使成本升高。
技術實現思路
1、本技術所要解決的一個技術問題是:人工檢測方式確定玻璃的副像偏離值不僅人工標記過程存在誤差,還大大降低了檢測速率甚至致使成本升高的問題。
2、為解決上述技術問題,本技術實施例提供一種副像偏離值測量方法,其包括如下步驟:
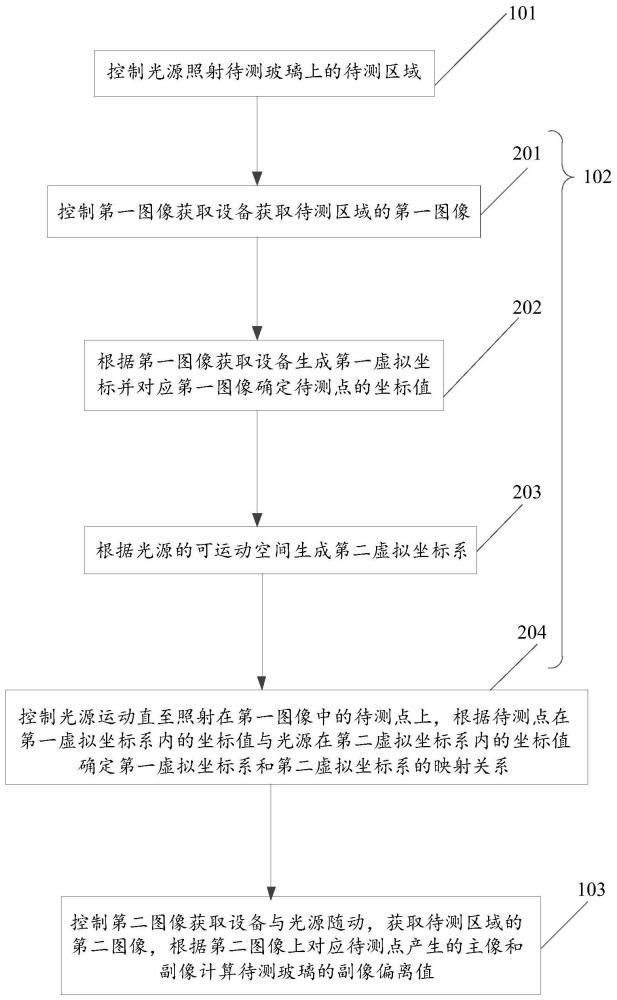
3、控制光源發出檢測光線照射待測玻璃上的待測區域;
4、控制第一圖像獲取設備獲取待測區域的第一圖像,根據第一圖像調整光源位置直至照射到待測區域內的待測點;
5、控制第二圖像獲取設備與光源隨動,獲取待測區域的第二圖像,根據第二圖像上對應待測點產生的主像和副像計算待測玻璃的副像偏離值。
6、在本技術的一些變更實施方式中,前述的控制光源發出檢測光線照射待測玻璃上的待測區域的步驟之前,還包括:
7、校準光源和所述第二圖像獲取設備,使所述光源和所述第二圖像獲取設備的光軸同軸;
8、其中,所述第二圖像獲取設備用于在待測玻璃的第二側獲取所述第二圖像,所述第一圖像獲取設備用于在待測玻璃的第二側相背的第一側獲取所述第一圖像。
9、在本技術的一些變更實施方式中,前述的校準所述光源和所述第二圖像獲取設備,使所述光源和所述第二圖像獲取設備的光軸同軸的步驟,包括:
10、控制所述光源運動,至少包括沿第一方向、第二方向的移動和繞所述第一方向、所述第二方向的翻轉,其中第一方向和所述第二方向相互垂直;
11、控制所述第二圖像獲取設備與所述光源隨動,控制第三圖像獲取設備獲取所述光源發出檢測光線照射在所述第二圖像獲取設備上的第三圖像;
12、獲取所述第二圖像獲取設備的視場下的第四圖像;
13、根據第三圖像和第四圖像調整所述光源和/或所述第二圖像獲取設備的位置,使所述光源照射在所述第二圖像獲取設備的鏡頭中心時光源照射在第四圖像的中心,確定所述光源和所述第二圖像獲取設備的隨動偏差。
14、在本技術的一些變更實施方式中,前述的控制第一圖像獲取設備獲取待測區域的第一圖像,根據第一圖像調整光源位置直至照射到待測區域內的待測點的步驟,包括:
15、控制所述第一圖像獲取設備獲取待測區域的第一圖像;
16、根據第一圖像獲取設備生成第一虛擬坐標系并對應第一圖像確定待測點的坐標值;
17、根據所述光源的可運動空間生成第二虛擬坐標系;
18、控制所述光源運動直至照射在第一圖像中的待測點上,根據待測點在第一虛擬坐標系內的坐標值與所述光源在第二虛擬坐標系內的坐標值確定第一虛擬坐標系和第二虛擬坐標系的映射關系。
19、在本技術的一些變更實施方式中,前述的控制第二圖像獲取設備與光源隨動,獲取待測區域的第二圖像,根據第二圖像上對應待測點產生的主像和副像計算待測玻璃的副像偏離值的步驟,包括:
20、根據下述公式計算副像偏離值
21、θ=atan(np/f)
22、式中:θ為主像和副像偏離角度;h為主像和副像在第二圖像中的距離,p為第二圖像獲取設備的像素點距離;n為h與p比值;f為第二圖像獲取設備的焦距。
23、在本技術的第二方面提供一種基于前述副像偏離值測量方法的副像偏離值測量裝置,其包括:
24、承載機構,所述承載機構包括并排且間隔設置的第一承載架、第二承載架以及第三承載架;所述第一承載架包括承載部,所述承載部能夠相對于水平面繞第一方向活動設置,以傾斜承載待測玻璃使所述待測玻璃保持其安裝角度的狀態;所述第一方向平行水平面;
25、光源,所述光源活動設置于所述第二承載架,以向所述第一承載架發射檢測光線;
26、第一圖像獲取設備,所述第一圖像獲取設備活動設置于所述第二承載架,以朝向所述第一承載架獲取并發送包含所述待測玻璃上待測區域的第一圖像;
27、第二圖像獲取設備,所述第二圖像獲取設備活動設置于所述第三承載架,以朝向所述第一承載架獲取并發送被檢測光線照射的待測玻璃上待測區域的第二圖像;
28、處理器,所述處理器信號連接所述光源、所述第一圖像獲取設備和所述第二圖像獲取設備;所述處理器控制所述第二圖像獲取設備與所述光源同步隨動;所述處理器能夠根據所述第一圖像調整所述光源的照射方向;所述處理器能夠根據所述第二圖像計算待測點產生的副像偏離值。
29、在本技術的一些變更實施方式中,前述的副像偏離值測量裝置,其還包括直線驅動機構,所述直線驅動機構設置于所述第二承載架和所述第三承載架;
30、所述直線驅動機構包括第一導向件、第二導向件、安裝部、第一驅動部以及第二驅動部;
31、所述安裝部用于活動連接所述光源或所述第二圖像獲取設備;
32、所述第一導向件沿所述第一方向延伸,所述安裝部活動設置于所述第一導向件,所述第一驅動部連接于所述安裝部,所述第一驅動部信號連接所述處理器,以根據控制信號驅動所述安裝部在所述第一導向件上沿所述第一方向往復運動;
33、所述第二導向件沿第二方向延伸,所述第一導向件活動設置于所述第二導向件上,所述第二驅動部連接于所述第一導向件,所述第二驅動部信號連接所述處理器,以根據控制信號驅動所述第一導向件在第二導向件上沿所述第二方向往復運動;所述第二方向垂直所述第一方向。
34、在本技術的一些變更實施方式中,前述的副像偏離值測量裝置,其還包括轉向驅動機構,所述轉向驅動機構于所述安裝部上接于所述光源或所述第二圖像獲取設備;
35、所述轉向驅動機構包括電動旋轉臺和電動俯仰臺,所述電動旋轉臺設置于所述安裝部上,所述電動旋轉臺與所述處理器信號連接,以能夠根據控制信號繞所述第二方向往復轉動第一指定角度;
36、所述電動俯仰臺設置于所述電動旋轉臺上,所述電動俯仰臺信號連接于所述處理器,以能夠根據控制信號繞所述第一方向轉動第二指定角度;
37、其中,所述光源或所述第二圖像獲取設備設置于所述電動俯仰臺。
38、在本技術的一些變更實施方式中,前述的副像偏離值測量裝置,其還包括第三圖像獲取設備,所述第三圖像獲取設備設置于所述電動俯仰臺上,所述第三圖像獲取設備與所述處理器信號連接,以根據控制信號獲取并傳輸所述光源發出的檢測光線照射在所述第二圖像獲取設備上的第三圖像至所述處理器;
39、還包括旋轉安裝部;
40、兩個所述旋轉安裝部沿第二方向間隔設置于所述第二承載架上,用于可拆卸安裝所述光源;所述第二方向垂直所述第一方向。
41、在本技術的一些變更實施方式中,前述的副像偏離值測量裝置,其中所述第一承載架包括支座;
42、所述支座上繞所述第一方向轉動設有連接部,所述連接部用于連接所述承載部,以使所述承載部能夠繞所述第一方向轉動;
43、所述承載部包括第一架體、第二架體、第三架體和第四架體;
44、所述第一架體和所述第二架體沿所述第一方向相對且間隔設置,所述第一架體和/或所述第二架體接于所述連接部,所述第一架體朝向所述第二架體的一側以及所述第二架體朝向所述第一架體的一側均沿其延伸方向依次設有若干限位部;
45、所述第三架體和所述第四架體分別對應所述第一架體的兩端活動設置于所述第一架體和所述第二架體之間,所述第三架體、所述第四架體與所述限位部相適配;
46、其中,所述第三架體朝向所述第四架體的一側以及所述第四架體朝向所述第三架體的一側分別設有承托板,用于承托待測玻璃上相對的兩邊緣。
47、通過上述技術方案,本技術提供的副像偏離值測量方法,通過對光源、第一圖像獲取設備以及第二圖像獲取設備的自動控制實現高效且精準的檢測過程,避免人工定位和觀測帶來的誤差;同時配合對于圖像的自動處理提高測試結果的準確性;有效解決現有技術中人工檢測方式確定玻璃的副像偏離值不僅人工標記過程存在誤差,還大大降低了檢測速率甚至致使成本升高的問題。
- 還沒有人留言評論。精彩留言會獲得點贊!