一種一體式的滾柱絲杠集成模組的制作方法
本發明涉及滾柱絲杠,尤其涉及一種一體式的滾柱絲杠集成模組。
背景技術:
1、不同于滾珠絲杠采用滾珠傳遞負載,行星絲杠通過螺紋滾柱傳遞負載,更多的接觸點和螺紋角度設計使得行星絲杠的負載等同于更大直接的滾珠絲杠,同時行星絲杠可以提供更高的轉速和更大的接速度,具有更強的剛度和抗沖擊能力。
2、滾柱絲杠一般包括rv行星滾柱絲杠和rvi反轉式行星滾柱絲杠兩種,其中rv行星滾柱絲杠是驅動絲杠轉動,通過滾柱傳動使得螺母進行直線運動,其行程由絲杠的螺紋長度決定,滾柱與進行直線運動的螺母保持相對靜止。而rvi反轉式行星滾柱絲杠是驅動螺母轉動,通過滾柱傳動使得絲杠進行直線運動,其行程由螺母的內螺紋長度決定,滾柱與進行直線運動的絲杠保持相對靜止。
3、在人形機器人的身體肢干連接中,通常需要使用rvi反轉式行星滾柱絲杠結構,但是在實際使用過程中,其行程受螺母內螺紋長度限制,螺母長度較長時內螺紋加工極其困難。另外rvi反轉式行星滾柱絲杠工作時,電機包裹在螺母外驅動螺母轉動,電機的長度也相應較長,加工成本高,而且電機中孔需要安裝螺母、滾柱和絲杠,導致電機內徑大、壁厚薄,電機的功率和扭矩能力都被限制,絲杠直徑也受限制,影響絲杠的負載能力。
技術實現思路
1、本發明的目的是提供一種一體式的滾柱絲杠集成模組,其具有高負載、較小導程、較小驅動扭矩、更小體積、高精度、耐沖擊、高剛度等特點,且降低加工成本和加工難度。
2、本發明的上述技術目的是通過以下技術方案得以實現的:
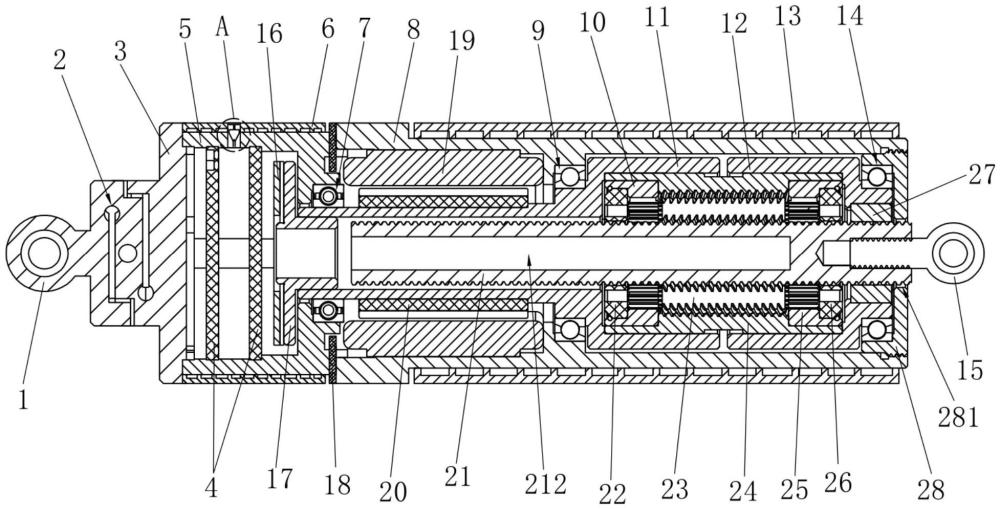
3、一種一體式的滾柱絲杠集成模組,包括同軸設置的電機定子、電機轉子、電機輸出法蘭、固定法蘭、螺母、絲杠、內齒圈一、內齒圈二和端蓋法蘭,還包括固定魚眼桿端、連接法蘭、驅動板、外殼一、外殼二、輸出魚眼桿端;
4、所述固定魚眼桿端與連接法蘭連接,所述外殼一設置在連接法蘭遠離固定魚眼桿端的一端,所述驅動板設置在外殼一內與電機定子控制連接;所述外殼二設置在外殼一遠離連接法蘭的一端,所述電機定子、電機轉子、電機輸出法蘭、固定法蘭、螺母、絲杠、內齒圈一、內齒圈二和端蓋法蘭均設置在外殼二內,且所述端蓋法蘭設置在外殼二遠離外殼一的一端;
5、所述電機定子靠近外殼一,所述電機轉子位于電機定子內圈內,所述電機輸出法蘭一端位于電機轉子內圈內,一端伸出電機定子靠近固定法蘭;
6、所述螺母遠離外殼一與電機輸出法蘭及固定法蘭連接,且安裝在電機輸出法蘭及固定法蘭的內圈內,所述內齒圈一和內齒圈二分別安裝在螺母內圈的兩端;
7、所述螺母兩端還分別安裝有保持架一和保持架二,所述絲杠外周和螺母內圈之間設有若干繞絲杠圓周陣列設置的滾柱,若干所述滾柱兩端均安裝在保持架一和保持架二上,且每個所述滾柱兩端通過齒輪與內齒圈一、內齒圈二嚙合;若干所述滾柱與螺母內壁及絲杠外壁均螺紋連接,且所述絲杠外壁的螺紋為與絲杠等長的全螺紋;
8、所述絲杠沿其長度方向限位滑動安裝在端蓋法蘭上,其一端位于電機輸出法蘭及螺母的內孔內,另一端伸出端蓋法蘭與輸出魚眼桿端連接;
9、所述電機輸出法蘭靠近外殼一的一端和外殼一之間設有深溝球軸承,所述電機輸出法蘭和外殼二之間設有位于電機定子和螺母之間的支撐軸承一,所述固定法蘭靠近端蓋法蘭的一端和端蓋法蘭之間設有支撐軸承二。
10、通過采用上述技術方案,固定魚眼桿端作為固定側,輸出魚眼桿端作為輸出側,兩者固定整個模組。工作時,通過驅動板控制,電流通過驅動板通往電機定子使其產生旋轉力矩,電機轉子承受該旋轉力矩并通過電機輸出法蘭一體輸出轉矩,從而帶動螺母進行旋轉運動。在保持架一和保持架二作用下,帶動若干滾柱同步轉動,滾柱與螺母保持相對靜止的同時滾柱在兩端齒輪與內齒圈一、內齒圈二的嚙合下旋轉,與螺母及絲杠螺紋連接,實現驅動絲杠沿其長度方向水平滑動,帶動輸出魚眼桿端同步運動,實現推力或拉力的輸出。
11、本發明中,相較于傳統rvi反轉式行星滾柱絲杠,絲杠采用全螺紋結構,且滾柱與螺母保持相對靜止,其行程由絲杠長度決定,螺母長度無需較長,因此不需要加工冗長的螺母內螺紋,降低加工難度和加工成本。同時電機定子、電機轉子組成的電機與螺母形成串聯結構,而非包裹在螺母外,電機可選擇非細長的常規結構,降低電機加工難度和成本,且電機定子的壁厚可加大,能夠極大地提高電機的功率和扭矩能力,同時絲杠的外徑可以相應增大,提高絲杠的負載能力,使得輸出側可輸出高軸向負載力。整個模組一體化設計,具有更小的體積,更耐沖擊和更高的剛度。另外,本發明中螺母靠近輸出魚眼桿端,若輸出魚眼桿端發生撬動,螺母位置為支點位置,大部分情況下力矩較短,對絲杠、滾柱及螺母之間的徑向間隙影響小,只有絲杠遠離輸出魚眼桿端的一端滑動至螺母位置處時才會對徑向間隙影響較大。
12、進一步地,所述絲杠外壁圓周陣列設有至少兩個沿其長度方向設置的扁位,所述扁位與絲杠等長或位于絲杠靠近輸出魚眼桿端的一端,所述端蓋法蘭上設有與絲杠配合的扁位孔,所述絲杠外壁的螺紋覆蓋扁位且扁位處的螺紋高度減半。
13、通過采用上述技術方案,在扁位和扁位孔的配合作用下,實現絲杠的限位安裝,避免輸出魚眼桿端發生旋轉時帶動絲杠旋轉,影響絲杠和滾柱的傳動精度。其中,rv行星滾柱絲杠中由于絲杠為非全螺紋結構,可隨意在絲杠非螺紋位置隨意設置扁位進行限位,但是在全螺紋的絲杠外壁一般無法加工扁位,因此本發明中特別設置絲杠外壁的螺紋覆蓋扁位且扁位處的螺紋高度減半,以保證在實現設置扁位進行限位的同時,保證整體剛性和螺紋嚙合順暢性,避免螺紋嚙合發生卡頓。
14、進一步地,還包括力矩傳感器、編碼器和安裝法蘭,所述力矩傳感器集成設置在固定魚眼桿端和連接法蘭上,所述編碼器通過安裝法蘭安裝在電機輸出法蘭靠近外殼一的一端,所述編碼器位于外殼一內且位于驅動板靠近外殼二的一側,所述編碼器與驅動板通信反饋連接。
15、通過采用上述技術方案,設置力矩傳感器對模組的力矩進行監控,保證控制精度。設置編碼器與驅動板配合,對電機定子的旋轉進行控制,提高模組運行精度,提高模組集成度。
16、進一步地,所述外殼一外部設有散熱器一,所述外殼二外部設有散熱器二。
17、通過采用上述技術方案,利用散熱器一和散熱器二分別對外殼一和外殼二進行散熱,保證模組內部熱量能夠及時排出,避免模組因高溫發生故障,保證模組的工作壽命。
18、進一步地,所述外殼一連接有通氣組件,所述通氣組件包括設置在外殼一側壁且貫穿散熱器一的通氣孔,所述通氣孔與外殼一內部連通,且所述通氣孔內設有單向閥。
19、通過采用上述技術方案,驅動板設置在外殼一內,工作時產生的熱量高且驅動板直接影響整個模組的正常工作,因此通過設置包括通氣孔和單向閥的通氣組件,輔助散熱器一對外殼一進行散熱,保證外殼一內部由于運行產生的熱量能夠及時排出,且在單向閥的作用下保證外部水汽、灰塵等異物不會進入外殼一內。
20、進一步地,所述外殼一和外殼二之間設有隔熱圈,所述隔熱圈位于深溝球軸承外圈外。
21、通過采用上述技術方案,設置隔熱圈減少電機運行產生的熱量進入外殼一內,保證驅動板的運行環境良好。
22、進一步地,所述絲杠靠近輸出魚眼桿端的一端和固定法蘭之間設有刮油環,且所述刮油環位于螺母和端蓋法蘭之間。
23、通過采用上述技術方案,設置刮油環來保護絲杠,避免異物進入外殼一內對絲杠的正常工作造成影響。
24、進一步地,所述絲杠遠離輸出魚眼桿端的一端設有與其同軸的減重孔。
25、通過采用上述技術方案,在保證絲杠強度和剛性的前提下,在絲杠內設置減重孔實現減重,降低螺母和滾柱的驅動負載。
26、進一步地,所述內齒圈一、螺母、內齒圈二三者為分體式結構或一體式結構。
27、通過采用上述技術方案,內齒圈一、螺母、內齒圈二分體式結構便于加工,一體式結構便于安裝,可根據實際生產需求靈活選擇。
28、進一步地,所述支撐軸承一和支撐軸承二為角接觸球軸承、圓錐滾子軸承、十字交叉軸承中的一種。
29、通過采用上述技術方案,支撐軸承一和支撐軸承二用于分別固定和限位做旋轉運動的電機輸出法蘭和固定法蘭,并抵消產生的軸向力,可根據實際使用需求選擇角接觸球軸承、圓錐滾子軸承、十字交叉軸承中的一種。同時端蓋法蘭對支撐軸承一和支撐軸承二施加預緊力,消除軸向間隙,有效提高精度。
30、綜上所述,本發明具有以下有益效果:
31、1、本發明中滾柱通過保持架一和保持架二安裝在螺母上,絲杠采用全螺紋結構,工作時電機驅動螺母轉動,滾柱與螺母保持相對靜止,滾柱驅動絲杠進行直線運動,相較于傳統rvi反轉式行星滾柱絲杠,絲杠的運動行程由絲杠長度決定,螺母長度無需較長,因此不需要加工冗長的螺母內螺紋,降低加工難度和加工成本;
32、2、本發明中電機定子、電機轉子組成的電機與螺母形成串聯結構,而非包裹在螺母外,電機可選擇非細長的常規結構,降低電機加工難度和成本,且電機定子的壁厚可加大,能夠極大地提高電機的功率和扭矩能力,同時絲杠的外徑可以相應增大,提高絲杠的負載能力,使得輸出側可輸出高軸向負載力;
33、3、本發明中螺母靠近輸出魚眼桿端,若輸出魚眼桿端發生撬動,螺母位置為支點位置,大部分情況下力矩較短,對絲杠、滾柱及螺母之間的徑向間隙影響小;
34、4、本發明中絲杠外壁設置扁位,絲杠外壁的螺紋覆蓋扁位且扁位處的螺紋高度減半,端蓋法蘭設置于扁位配合的扁位孔,實現絲杠的限位安裝,避免輸出魚眼桿端發生旋轉時帶動絲杠旋轉,影響絲杠和滾柱的傳動精度,同時保證整體剛性和螺紋嚙合順暢性,避免螺紋嚙合發生卡頓;
35、5、本發明的一體化模組輸出側可輸出高軸向負載力,一體化結構體積更小,高精度滾柱絲杠組合更耐沖擊,具有更高的剛度,編碼器和力矩傳感器的運用進一步提高精度,絲杠設置減重孔降低驅動負載。
- 還沒有人留言評論。精彩留言會獲得點贊!