鉆漲掘進機及鉆漲破巖方法與流程
本技術涉及掘進機,具體而言,涉及一種鉆漲掘進機及鉆漲破巖方法。
背景技術:
1、目前,切割功率大、截割效率高、工作穩定且有很好的除塵系統的全巖巷重型懸臂式掘進機代表著巖巷掘進技術今后的發展方向;懸臂式掘進機與單體錨桿鉆機配套作業線(也稱為煤巷綜合機械化掘進)已逐步成為我國煤巷高效掘進方式中最主要的方式。
2、但是,巖層的硬度是一個非確定值,即不同區域內的巖層硬度不一定相同,且工作條件十分惡劣,當巖層硬度f(普氏硬度系數)大于10時,懸臂式掘進機不但效率極低、能耗增大,而且截齒掉落嚴重、甚至無法掘進,通常需將掘進機后撤至安全距離后采用鉆爆破巖后再進行掘進,不僅掘進效率較低,而且爆破操作安全隱患較大。
技術實現思路
1、為了解決上述相關技術中的懸臂式掘進機無法滿足高硬度巖巷的要求的問題。
2、本技術的第一個方面在于提出一種鉆漲掘進機。
3、本技術的第二個方面在于提出一種鉆漲破巖方法。
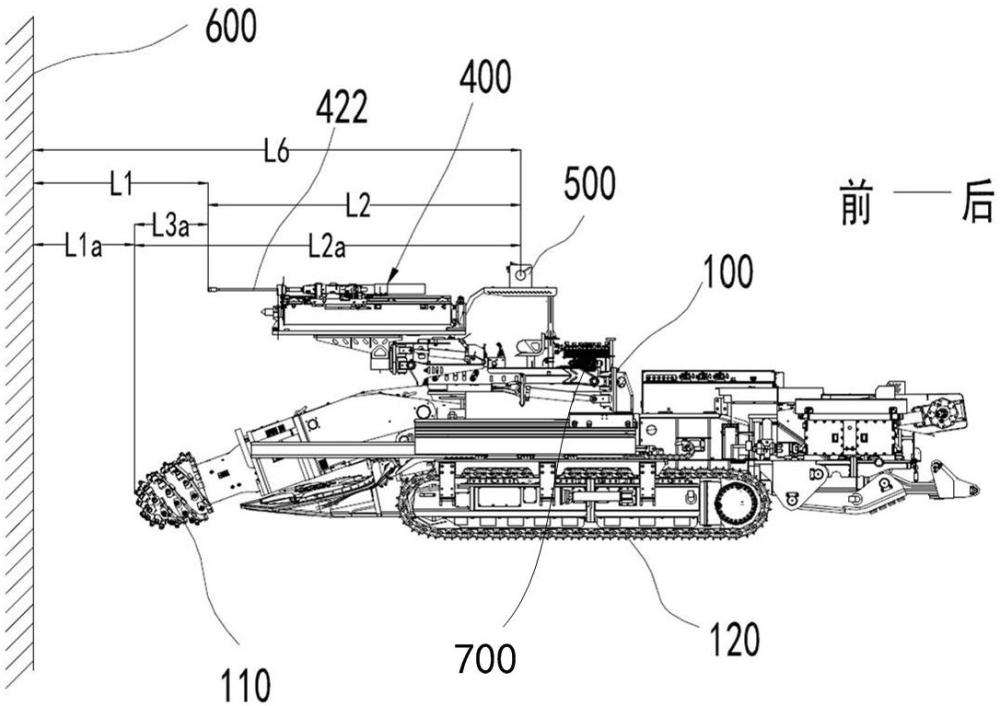
4、有鑒于此,根據本技術的第一個方面,提出了一種鉆漲掘進機,包括:掘進機本體;前后伸縮裝置,設置在掘進機本體上;角度調節裝置,設置在前后伸縮裝置上,角度調節裝置能在前后伸縮裝置的作用下沿前后方向來回移動;鉆漲裝置,設置在角度調節裝置上;定位裝置,用于定位掘進機本體在巷道中的位置;控制裝置,和定位裝置相連,并能根據定位裝置的信號控制前后伸縮裝置和角度調節裝置動作;其中,在前后伸縮裝置完全伸出時,鉆漲裝置的前端至工作面之間的距離小于掘進機本體的截割部前端至工作面之間的距離。
5、在實際應用中,以截割部處于底部狀態作為標尺,駕駛掘進機盡量移動至巷道中間并靠近斷面實現一級定位;隨后,通過定位裝置測量掘進機本體在巷道中的實際位置,通過將實際位置的位置數據和標準位置的位置數據進行對比,計算偏差值;隨后,控制裝置根據偏差值控制前后伸縮裝置和角度調節裝置的動作,調整鉆漲裝置的姿態,從而實現二級定位;最后,進行鉆漲作業。這樣一來,通過鉆漲裝置提前對巖層進行預處理,可以降低后續截割作業的難度和阻力,從而有助于提高掘進效率和作業質量;進一步地,通過二級定位過程,可以實現對巖層的高效、精確地預處理,避免處理不均影響后續作業質量,從而可以進一步提高掘進效率和作業質量。
6、在一些技術方案中,可選地,鉆漲裝置包括鉆箱、鑿巖組件和漲裂組件;鑿巖組件和漲裂組件均安裝在鉆箱上。這樣,通過鑿巖組件和漲裂組件的協同工作,能夠高效地對巖層進行預處理,為后續掘進作業創造有利條件。
7、在一些技術方案中,可選地,鉆箱包括:底座,和角度調節裝置連接;鉆箱主體,鉆箱主體和底座轉動連接;擺動機構,和鉆箱主體連接,以帶動鉆箱主體轉動;其中,鑿巖組件和漲裂組件均安裝在鉆箱主體上。
8、在上述技術方案中,通過擺動機構調整鉆箱主體的角度,從而調整鑿巖組件和漲裂組件的作業角度,以確保鑿巖組件和漲裂組件之間的協同工作,確保兩者能夠在正確的位置和角度上共同工作,以實現對巖層的高效預處理。
9、在一些技術方案中,可選地,鉆箱還包括定位錐保持架;定位錐保持架和底座連接,鉆箱主體和定位錐保持架轉動連接。這樣一來,可以提高鉆箱主體的連接穩定性,防止連接松動或失效。
10、在一些技術方案中,可選地,鉆箱還包括:定位座,設置在鉆箱主體的前端;頂伸件,設置在定位座上,并能沿前后方向來回移動;復位件,和頂伸件連接;反饋件,和控制裝置連接,用于接收并反饋頂伸件的狀態信號。
11、在上述技術方案中,在鉆漲作業前,控制鉆箱主體的前端接觸斷面,此時,頂伸件被觸發并向后移動,從而觸發反饋件將頂伸件的狀態信號反饋至控制裝置執行預設的延時操作,這樣,可以將定位座完全打入巖體,實現三級定位,從而確保鉆漲作業的高精度和穩定性,有助于提高整體掘進質量。
12、在一些技術方案中,可選地,反饋件包括:磁環,設置在頂伸件上;磁簧開關,設置在定位座上,并和控制裝置連接。通過磁簧開關的檢測信號確定頂伸件的狀態,結構簡單,占用空間小,從而方便安裝。
13、在一些技術方案中,可選地,鑿巖組件包括:鑿巖機、鉆桿和第一進給機構;其中,第一進給機構設置在鉆箱上,第一進給機構包括:滑軌,沿前后方向設置在鉆箱上;連接座,設置在滑軌上,并能沿滑軌移動;驅動單元,和連接座連接,以帶動連接座移動;鑿巖機設置在連接座上;鉆桿設置在鑿巖機的前端。
14、在一些技術方案中,可選地,第一進給機構還包括位移檢測單元,用于檢測連接座的移動距離;從而確保鑿巖機和鉆桿能夠按照預定的深度進行進給。
15、在一些技術方案中,可選地,第一進給機構還包括:惰輪,安裝在鉆箱上;連接繩,一端和連接座連接,另一端繞過惰輪和驅動單元連接。這樣,即使驅動單元和連接座在空間位置上有所限制,也可以通過惰輪和連接繩實現動力傳遞,從而有助于簡化鑿巖組件的占用空間。
16、在一些技術方案中,可選地,漲裂組件包括漲裂器和第二進給機構,漲裂器和第二進給機構連接;其中,第二進給機構和第一進給機構的結構相同。
17、在一些技術方案中,可選地,定位裝置包括:至少四個測距傳感器,用于分別測量掘進機本體在前、上、左和右四個方向和巷道的距離,從而確定掘進機本體在巷道中的位置。
18、在一些技術方案中,可選地,定位裝置還包括:保護罩,為封閉腔體,保護罩在前、上、左和右方向分別設有通孔;至少四個透光件,分別設置在通孔中,以封閉通孔;其中,測距傳感器設置在保護罩中,并和透光件一一對應設置。
19、在上述技術方案中,測距傳感器設置在保護罩的內部腔體中,且測量信號可以通過相應地透光件。這樣一來,可以保護測距傳感器,避免其受外部環境的影響(如塵埃,水分等)。
20、在一些技術方案中,可選地,定位裝置還包括清洗件,清洗件用于清洗透光件。通過增加清洗件對透光件進行清洗,可以去除附著在透光件表面的塵埃等其他雜質,從而可以確保測距傳感器的測量精度和穩定性。
21、根據本技術的第二個方面,本技術提出了一種鉆漲破巖方法,利用如上述任一項技術方案提出的鉆漲掘進機鉆漲破巖,由此,具有上述任一技術方案的全部有益效果,在此不再贅述。
22、鉆漲破巖方法包括如下步驟:
23、以掘進機的截割部處于底部狀態作為標尺,使掘進機靠近巷道的中間位置,并靠近斷面,完成一級定位;
24、通過定位裝置定位掘進機在巷道中的實際位置;
25、計算實際位置的位置數據和標準位置的位置數據的偏差值;
26、根據偏差值調節角度調節裝置和前后伸縮裝置的動作,完成二級定位;
27、控制鉆漲裝置向工作面進給;
28、進行鉆漲破巖作業。
29、在一些技術方案中,可選地,鉆漲裝置包括鉆箱、鑿巖組件和漲裂組件;鉆箱包括鉆箱主體、定位座、頂伸件、復位件和反饋件;其中,定位座設置在鉆箱主體的前端;頂伸件設置在定位座上,并能沿前后方向來回移動;復位件和頂伸件連接;反饋件和控制裝置連接,用于接收并反饋頂伸件的狀態信號;其中,控制鉆漲裝置向工作面進給具體包括:
30、控制鉆箱主體的前端接觸斷面,此時,頂伸件被觸發并移動至觸發反饋件,反饋件將頂伸件的狀態信號反饋至控制裝置,使控制裝置執行預設的延時操作,從而將定位座完全打入巖體,實現三級定位。
31、通過以上說明可知,本技術提出的鉆漲掘進機及鉆漲破巖方法,該鉆漲掘進機結構緊湊,能夠在不大幅度增加功率的前提下,通過對巖層硬度f大于10的堅硬巖層自動打孔并漲裂,創造自由面后,再進行截割作業,進而實現提高掘進效率、井下少人化作業的目的。
32、本技術的附加方面和優點將在下面的描述部分中變得明顯,或通過本技術的實踐了解到。
- 還沒有人留言評論。精彩留言會獲得點贊!