一種機鎖鉆桿控制方法、監控模擬系統及工程機械與流程
本發明涉及機鎖鉆桿,更具體地說,涉及一種機鎖鉆桿控制方法。此外,本發明還涉及一種用于實施上述機鎖鉆桿控制方法的監控模擬系統及包括上述監控模擬系統的工程機械。
背景技術:
1、現有技術中,使用機鎖伸縮鉆桿時,鉆桿地下部分為不可見的部分,其相關的加壓臺連接的解鎖情況無法直觀的觀察,當鉆桿上提回收時,需要進行相應的解鎖操作,這對于操作者尤其是經驗不豐富的操作者來說難度較大,容易出現帶桿事故,損壞設備,甚至出現人員傷亡的情況,為客戶帶來巨大的經濟財產損失。
2、綜上所述,如何提供一種可方便觀察鉆桿帶桿情況的控制方法,是目前本領域技術人員亟待解決的問題。
技術實現思路
1、有鑒于此,本發明的目的是提供一種機鎖鉆桿控制方法,可通過判斷鉆桿是否處于帶桿狀態,方便觀察鉆桿帶桿情況,避免帶桿事故。
2、本發明的另一目的是提供一種用于實施上述機鎖鉆桿控制方法的監控模擬系統及包括上述監控模擬系統的工程機械。
3、為了實現上述目的,本發明提供如下技術方案:
4、一種機鎖鉆桿控制方法,應用于機鎖鉆桿裝置,所述機鎖鉆桿裝置包括桅桿、鉆桿、帶動所述鉆桿升降的主卷揚、動力頭、帶動所述動力頭升降的動力頭卷揚、第一測力傳感器及第二測力傳感器;所述第一測力傳感器用于獲取所述主卷揚的第一拉力信息gz,所述第二測力傳感器用于獲取所述動力頭卷揚的第二拉力信息gd;
5、所述機鎖鉆桿控制方法包括:
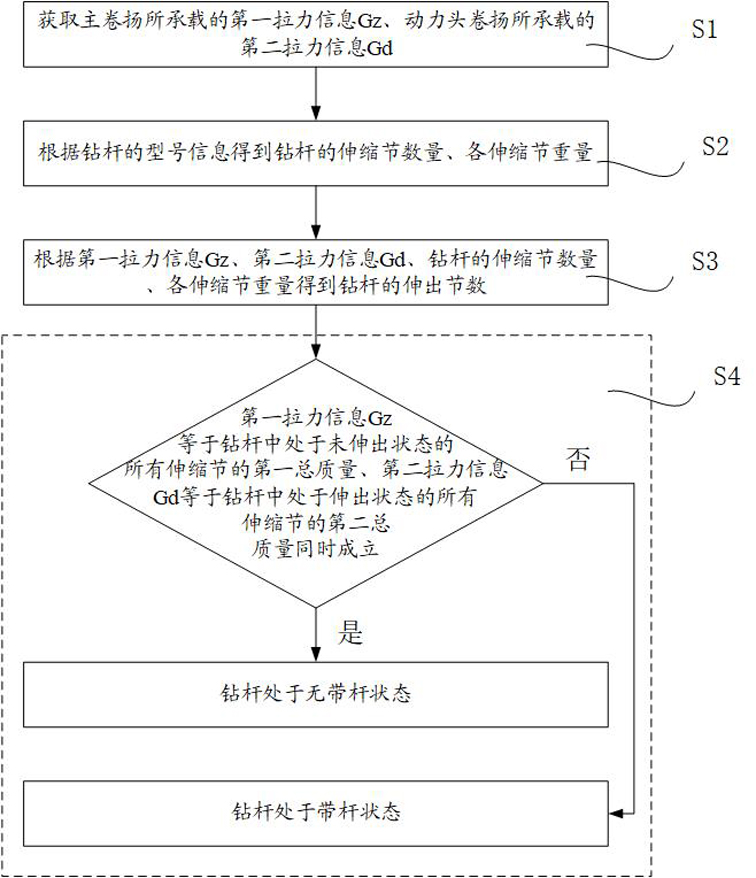
6、獲取所述主卷揚所承載的第一拉力信息gz、所述動力頭卷揚所承載的第二拉力信息gd;
7、根據所述鉆桿的型號信息得到所述鉆桿的伸縮節數量、各伸縮節重量;
8、根據所述第一拉力信息gz、所述第二拉力信息gd、所述鉆桿的伸縮節數量、各伸縮節重量得到所述鉆桿的伸出節數;
9、判斷所述第一拉力信息gz等于所述鉆桿中處于未伸出狀態的所有伸縮節的第一總質量、所述第二拉力信息gd等于所述鉆桿中處于伸出狀態的所有伸縮節的第二總質量是否同時成立,若是,則所述鉆桿處于無帶桿狀態,若否,則所述鉆桿處于帶桿狀態。
10、可選地,定義所述鉆桿的伸縮節數量為n,其中n為大于或等于2的正整數;所述鉆桿的總重量為gn,各伸縮節的重量依次為:g1、g2、g3、……gn;
11、所述根據所述第一拉力信息gz、所述第二拉力信息gd、所述鉆桿的伸縮節數量、各伸縮節重量得到所述鉆桿的伸出節數包括:
12、判斷所述第一拉力信息gz是否等于所述鉆桿的總重量,若是,則所述鉆桿的伸縮節均未伸出,若否,則進入下一步;
13、定義前m個伸縮節的總重量為gm,其中m為大于或等于2的正整數;
14、判斷所述第二拉力信息gd小于或等于gm且大于前m個伸縮節的總重量為gm與第m個伸縮節的重量gm的差值、所述第一拉力信息gz大于或等于所述鉆桿的總重量為gn與前m個伸縮節的總重量gm的差值是否同時成立,若是,則所述鉆桿的伸出節數為m。
15、可選地,所述機鎖鉆桿裝置還包括第一測距傳感器及第二測距傳感器;所述第一測距傳感器用于獲取所述動力頭的最下端與所述桅桿的最下端之間的第一距離l1,所述第二測距傳感器用于獲取所述鉆桿的最下端與所述桅桿的最下端之間的第二距離l2;當所述動力頭的最下端位于所述桅桿的最下端的上側時,所述第一距離l1為正值;當所述鉆桿的最下端位于所述桅桿的最下端的下側時,所述第二距離l2為正值,當所述鉆桿的最下端位于所述桅桿的最下端的上側時,所述第二距離l2為負值;
16、上述步驟中若是,則所述鉆桿的伸出節數為m之后,所述機鎖鉆桿控制方法還包括:
17、根據所述鉆桿的型號信息得到所述鉆桿的伸縮節數量、各伸縮節長度及各伸縮節中各加壓臺距離其所在伸縮節的最上端的加壓臺距離信息;
18、獲取所述鉆桿的伸出節數m,計算所有處于伸出狀態的伸縮節的總長度信息與最近伸出的伸縮節的長度信息的長度差值信息;
19、計算所述第一距離l1與所述第二距離l2相加的總距離信息;
20、將所述長度差值信息分別與最近伸出的伸縮節中所有加壓臺距離信息相加;得到最近伸出的伸縮節中各加壓臺距離鉆桿最低端的第三距離信息l3;
21、定義最近伸出的伸縮節中加壓臺的數量為p,p為大于或等于1的正整數,最近伸出的伸縮節中各加壓臺距離鉆桿最低端的第三距離信息l3由小到大依次為:l31、l32、……l3p;
22、判斷所述總距離信息是否等于所述第三距離信息l3中的任意一者,若是,則所述動力頭位于所述第三距離信息l3與所述總距離信息相等的一者所對應的加壓臺處;若否,則進入下一步;
23、判斷所述總距離信息是否位于所述第三距離信息l3中由小到大依次排列的任意兩個距離l3f、l3f+1之間,l3f、l3f+1為所述第三距離信息l3中相鄰的兩者,若是,則所述動力頭位于l3f所對應的加壓臺與所述l3f+1所對應的加壓臺之間;
24、計算所述動力頭距離l3f所對應的加壓臺的第四距離l4,所述第四距離l4為所述總距離信息與l3f的差值;計算所述動力頭距離l3f+1所對應的加壓臺的第五距離l5,所述第五距離l5為所述總距離信息與l3f+1的差值。
25、可選地,各伸縮節的長度依次為:lz1、lz2、lz3、……lzn;
26、所述機鎖鉆桿控制方法還包括:
27、計算所述第一距離l1與所述第二距離l2相加的總距離信息;
28、計算所有處于伸出狀態的伸縮節的總長度信息以及所述總長度信息與最近伸出的伸縮節的長度信息的長度差值信息;
29、根據所述總距離信息大于所述總長度信息與最近伸出的伸縮節的長度信息的長度差值信息,且所述總距離信息小于所有處于伸出狀態的伸縮節的總長度信息,得到所述鉆桿的伸出節數;
30、判斷所述第二拉力信息gd等于所述鉆桿中處于伸出狀態的所有伸縮節的第二總質量、所述第一拉力信息gz等于所述鉆桿中處于未伸出狀態的所有伸縮節的第一總質量是否均不成立,若是,則所述鉆桿處于帶桿狀態,若否,則所述鉆桿處于無帶桿狀態。
31、一種監控模擬系統,用于實施上述任一項所述的機鎖鉆桿控制方法,所述監控模擬系統包括:
32、第一測力檢測單元,用于獲取主卷揚的第一拉力信息gz;
33、第二測力檢測單元,用于獲取動力頭卷揚的第二拉力信息gd;
34、數據存儲單元,用于存儲鉆桿的型號信息、伸縮節數量、各伸縮節重量、各伸縮節長度及各伸縮節中各加壓臺距離其所在伸縮節的最上端的加壓臺距離信息;
35、第一控制器,用于根據所述第一拉力信息gz、所述第二拉力信息gd、所述鉆桿的伸縮節數量、各伸縮節重量得到所述鉆桿的伸出節數;并根據所述第一拉力信息gz、處于未伸出狀態的所有伸縮節的第一總質量、所述第二拉力信息gd、處于伸出狀態的所有伸縮節的第二總質量判斷所述鉆桿是否處于帶桿狀態。
36、可選地,還包括第一顯示器,所述第一顯示器設置有用于顯示所述鉆桿處于帶桿狀態的第一顯示標識及用于顯示所述鉆桿處于未帶桿狀態的第二顯示標識。
37、可選地,還包括警示器,所述警示器用于在所述鉆桿處于帶桿狀態時發出警示信息。
38、可選地,還包括第二控制器,所述第二控制器用于根據所述第二拉力信息gd、所述各伸縮節重量、所述第一拉力信息gz計算得到所述鉆桿的伸出節數。
39、可選地,還包括:
40、第一測距單元,用于獲取所述動力頭的最下端與所述桅桿的最下端之間的第一距離l1;
41、第二測距單元,用于獲取所述鉆桿的最下端與所述桅桿的最下端之間的第二距離l2;
42、第三控制器,用于根據所述第一距離l1、所述第二距離l2、所述鉆桿的伸縮節數量、各伸縮節長度及各伸縮節中各加壓臺距離其所在伸縮節的最上端的加壓臺距離信息得到動力頭與相鄰的加壓臺的距離信息。
43、可選地,還包括第二顯示器,所述第二顯示器用于顯示所述動力頭與相鄰的加壓臺的距離信息。
44、一種工程機械,包括上述任一項所述的監控模擬系統。
45、在使用本發明提供的機鎖鉆桿控制方法的過程中,首先,通過第一測力傳感器獲取主卷揚所承載的第一拉力信息gz,通過第二測力傳感器獲取動力頭卷揚所承載的第二拉力信息gd;根據鉆桿的型號信息得到鉆桿的伸縮節數量、各伸縮節重量;根據第一拉力信息gz、第二拉力信息gd、鉆桿的伸縮節數量、各伸縮節重量得到鉆桿的伸出節數;判斷第一拉力信息gz等于鉆桿中處于未伸出狀態的所有伸縮節的第一總質量、第二拉力信息gd等于鉆桿中處于伸出狀態的所有伸縮節的第二總質量是否同時成立,若是,則鉆桿處于無帶桿狀態,若否,則鉆桿處于帶桿狀態。
46、本發明提供的機鎖鉆桿控制方法在實際實施的過程中,可以對鉆桿是否處于帶桿狀態作出判斷,及時發現鉆桿處于帶桿狀態的信息,避免帶桿狀態的解鎖操作,提高設備運行的安全性。
47、此外,本發明還提供了一種用于實施上述機鎖鉆桿控制方法的監控模擬系統及包括上述監控模擬系統的工程機械。
- 還沒有人留言評論。精彩留言會獲得點贊!