一種變水頭參數自適應雙饋抽水蓄能機組及其控制方法與流程
本發明屬于抽水蓄能機組控制,更具體地,涉及一種變水頭參數自適應雙饋抽水蓄能機組及其控制方法。
背景技術:
1、目前,國內外對于變速抽水蓄能機組的研究集中在系統建模和控制器改進方面。與常規水電機組相比,小型抽水蓄能機組水庫容量小,調節系統非線性特性明顯。現有技術中機組采用統一pi參數的控制方法在面臨不同水頭時控制效果不佳,引起較大的轉速波動。而傳統研究僅聚焦在抽蓄機組的系統建模、控制器改進或算法的改進方面,缺少考慮水頭變化的小型變速抽水蓄能機組控制策略的研究。
2、此外,根據現有抽水蓄能機組模型,當抽蓄機組負載突增時,機組降低轉速補充功率輸出缺額,調速器受轉速控制指令觸發,增加導葉開度,提高水流量以恢復轉速。但由于導葉機械裝置和水流均具有慣性,當負載突變量較大時,轉速不易快速恢復至參考值,而持續存在的較大轉差會加重變流器的運行負擔,從而形成變頻失敗的風險隱患。同時,微型抽蓄因庫容較小而水頭波動更為顯著,此種運行工況特性進一步加劇了上述運行風險。鑒于此,需要一種水頭自適應的參數優化控制方法,以鞏固抽蓄控制策略在變水頭工況下對轉速的控制能力。
技術實現思路
1、為解決現有技術中存在的不足,本發明提供一種變水頭參數自適應雙饋抽水蓄能機組及其控制方法,實現水頭自適應的pi參數優化。
2、本發明采用如下的技術方案。
3、本發明的第一方面提供了一種變水頭參數自適應雙饋抽水蓄能機組控制方法,包括以下步驟:
4、建立雙饋抽水蓄能機組數學模型,其中所述數學模型包括雙饋感應電機數學模型和水泵水輪機及調速系統數學模型;
5、根據雙饋感應電機數學模型和水泵水輪機及調速系統數學模型,構建功率解耦的機側、網側變流器控制策略;
6、通過對抽蓄控制環節pi參數進行可行域分析和尋優,構建水頭自適應控制策略,配合機側、網側變流器控制策略實現變水頭工況下對雙饋抽水蓄能機組的控制。
7、優選地,雙饋感應電機數學模型包括電壓、磁鏈、電磁轉矩和定子有功和無功模型,
8、建立雙饋抽水蓄能機組數學模型,包括:
9、電壓方程表示如下,
10、
11、式中:
12、usd、usq、urd、urq分別為定、轉子電壓d、q軸分量;
13、isd、isq、ird、irq分別為定、轉子電流d、q軸分量;
14、rs、rr分別為電機定、轉子側繞組電阻;
15、d/dt為微分算子;
16、ψsd、ψsq、ψrd、ψrq分別為定、轉子磁鏈d、q軸分量;
17、ωs、ωr分別為電機的定、轉子電角速度;
18、ωslip為電機定轉子電角速度差,ωslip=ωs-ωr;
19、磁鏈方程表示如下,
20、
21、式中:
22、ls、lr、lm分別為定、轉子電感和互感;
23、電磁轉矩方程表示如下,
24、te=nplm(isqird-isdirq)
25、式中:
26、te為電磁轉矩;
27、np為電機的極對數;
28、定子有功和無功以如下公式表示,
29、
30、式中:
31、ps、qs分別為定子有功和無功功率。
32、優選地,建立水泵水輪機及調速系統數學模型,包括:
33、水泵水輪機數學模型以如下公式表示,
34、
35、式中:
36、q為流量;
37、h為有效水頭;
38、g為導葉開度;
39、h0為實際水頭;
40、ηt為水輪機效率;
41、tw為水流慣性時間常數;
42、tm為機械轉矩;
43、pm為機械功率;
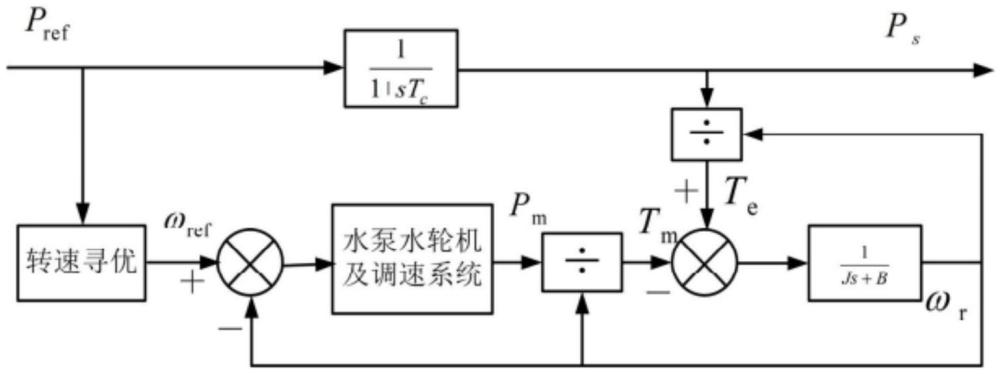
44、根據水泵水輪機模型,以最大化水輪機效率為目標,計算調速系統最優參考轉速,作為調速系統的輸入,最優參考轉速以如下公式表示,
45、ωref=e0+e1(pref-e2)+e3(h0-e4)
46、式中:
47、ωref為參考轉速;
48、pref為參考功率;
49、ei,i∈{0,1,…,4}為線性擬合系數;
50、根據調速器和液壓執行機構模型計算調速系統傳遞函數,建立調速系統數學模型,以如下公式表示,
51、
52、式中:
53、δω為轉速偏差;
54、kp、ki為調速器的控制參數;
55、ka為接力器增益;
56、ta為液壓執行機構響應時間常數。
57、優選地,機側變流器采用基于定子電壓定向矢量控制,以如下公式表示,
58、
59、式中:
60、urd、urq分別為轉子電壓d、q軸分量;
61、rr為電機轉子側繞組電阻;
62、ird、irq為轉子電流d、q軸軸分量;
63、ωs、ωr分別為電機的定、轉子電角速度;
64、ωslip為電機定轉子電角速度差;
65、ls、lr、lm分別為定、轉子電感和互感;
66、為漏磁系數;
67、un為電網電壓。
68、優選地,網側變換器采用帶解耦和擾動補償的直流環節電壓、電流雙閉環控制,電流內環以如下公式表示,
69、
70、式中:
71、vgdref、vgqref分別為變換器交流側d、q軸參考電壓;
72、igdref、igqref分別為d、q軸參考電流;
73、ugd是電網電壓的d軸分量;
74、igd、igq分別為輸入電流的d、q軸分量;
75、ω1表示同步旋轉坐標系的d軸與定子電壓矢量重合時的轉子的角速度;
76、lg為濾波電感;
77、kp、ki為調速器的控制參數;
78、電壓外環以如下公式表示,
79、
80、式中:
81、udc為直流母線電壓;
82、udcref為直流母線參考電壓。
83、優選地,構建水頭自適應控制策略的步驟具體包括:
84、構建雙饋式抽蓄機組轉速響應模型,采用根軌跡法分析kp和ki控制參數對轉速動態特性的影響,計算pi參數的可行域;
85、采用優化算法在可行域范圍內對pi參數進行尋優;
86、根據參數優化模型求解結果,得到可行域范圍內的最優轉速控制參數并輸入到調速器中進行轉速控制,配合機側、網側變流器功率解耦控制,進而實現水頭自適應的雙饋抽水蓄能機組控制。
87、優選地,雙饋式抽蓄機組轉速響應模型的開環傳遞函數以如下公式表示,
88、
89、式中:
90、kp、ki為調速器的控制參數;
91、j為雙饋式抽蓄機組轉動慣量;
92、b為雙饋感應電機的摩擦系數;
93、ka為接力器增益;
94、tw為水流慣性時間常數;
95、ta為液壓執行機構響應時間常數。
96、優選地,pi參數尋優使用雙饋抽蓄機組轉速偏差的時間加權積分絕對誤差作為優化算法的適應度函數;
97、所述時間加權積分絕對誤差準則以如下公式表示,
98、
99、式中:
100、t為時間;
101、ts為積分時間;
102、e(t)為誤差。
103、優選地,引入罰函數控制參數尋優過程中越限,參數優化模型以如下公式表示,
104、
105、式中:
106、ωref為參考轉速;
107、ω為實際轉速;
108、δ為懲罰量。
109、本發明的第二方面提供了一種變水頭參數自適應雙饋抽水蓄能機組,包括:
110、模型構建模塊,用于建立雙饋抽水蓄能機組數學模型,其中所述數學模型包括雙饋感應電機數學模型和水泵水輪機及調速系統數學模型;
111、變流器控制模塊,用于根據雙饋感應電機數學模型和水泵水輪機及調速系統數學模型,構建功率解耦的機側、網側變流器控制策略;
112、pi參數優化模塊,用于通過對抽蓄控制環節pi參數進行可行域分析和尋優,構建水頭自適應控制策略,配合機側、網側變流器控制策略實現變水頭工況下對雙饋抽水蓄能機組的控制。
113、優選地,機側變流器采用基于定子電壓定向矢量控制,網側變換器采用帶解耦和擾動補償的直流環節電壓、電流雙閉環控制。
114、優選地,pi參數優化模塊構建水頭自適應控制策略具體包括:
115、構建雙饋式抽蓄機組轉速響應模型,采用根軌跡法分析kp和ki控制參數對轉速動態特性的影響,計算pi參數的可行域;
116、采用優化算法在可行域范圍內對pi參數進行尋優;
117、根據參數優化模型求解結果,得到可行域范圍內的最優轉速控制參數并輸入到調速器中進行轉速控制,配合機側、網側變流器功率解耦控制,實現水頭自適應的雙饋抽水蓄能機組控制。
118、優選地,pi參數優化模塊構建的雙饋式抽蓄機組轉速響應模型以如下公式表示,
119、
120、式中:
121、kp、ki為調速器的控制參數;
122、j為雙饋式抽蓄機組轉動慣量;
123、b為雙饋感應電機的摩擦系數;
124、ka為接力器增益;
125、tw為水流慣性時間常數;
126、ta為液壓執行機構響應時間常數。
127、優選地,pi參數尋優模塊適應度函數為雙饋抽蓄機組轉速偏差的時間加權積分絕對誤差,pi參數尋優模塊采用罰函數控制越限,參數優化模型以如下公式表示,
128、
129、式中:
130、ωref為參考轉速;
131、ω為實際轉速;
132、δ為懲罰量。
133、與現有技術相比,本發明的有益效果至少包括:
134、(1)本發明彌補了水頭變化的小型變速抽水蓄能機組控制策略的空缺,實現了變水頭工況下機組的自適應控制,且轉速波動小,控制效果更好;
135、(2)本發明能有效降低負載突變時變流器變頻失敗的風險;
136、(3)本發明采用自適應pi參數優化方法,在庫容較小水頭變幅大的情況下,使微型抽蓄機組轉速可以更快恢復至參考值。
- 還沒有人留言評論。精彩留言會獲得點贊!