倉儲系統、以及倉儲調度方法和倉儲調度裝置與流程
本技術涉及倉儲物流技術,特別涉及一種倉儲系統、一種倉儲調度方法、一種倉儲調度裝置、一種電子設備、一種非瞬時計算機可讀存儲介質、以及一種計算機程序產品。
背景技術:
1、倉儲空間中可以部署包括多排貨架的貨架排組,貨架排組中的每排貨架都可以具有用于貯存貨物單元的貯存儲位,并且,貨物單元在每個貨架排組中的任意貯存儲位的入倉和出倉,可以通過部署在貨架立面的軌道機器人來實現。
2、倉儲空間中通常還需要部署工作站,工作站的水平臺面可以用于對貨物單元執行揀選操作,即,揀選操作臺的水平臺面可以被稱作揀選操作面,并且,待入倉或待出倉的貨物單元可以利用地面搬運機器人在工作站用作揀選操作面的水平臺面和貨架排組之間轉運,即,工作站可以看作是被并發執行出入倉搬運的多個貨物單元的集散地。通常情況下,貨物單元的出入倉搬運是并發執行的,因此,貨物單元在工作站和貨架排組之間的轉運也是并發的,即,工作站周圍會同時存在用于并發轉運的多臺地面搬運機器人。在此情況下,為了避免用于并發轉運的多臺地面搬運機器人在工作站周圍發生擁堵,工作站和貨架排組之間還會預留出疏散通行區域。
3、然而,揀選操作臺和疏散通行區域會減少倉儲空間中用于部署貨架的可用面積,可用面積的減少意味著貨架排組中的貨架數量減少,并且,貨架數量減少意味著倉儲空間的貯存儲位的數量減少。從而,倉儲空間的空間利用率會由于揀選操作臺和疏散通行區域的存在而降低。尤其是,對于諸如“店中倉”或“前置倉”等空間尺寸有限的倉儲空間而言,揀選操作臺和疏散通行區域所導致的空間利用率下降更為嚴重。
4、如上可見,如何在保留倉儲空間內的揀選操作的情況下提高倉儲空間的空間利用率,成為現有技術中有待解決的技術問題。
技術實現思路
1、本技術的實施例提供了一種一種倉儲系統、一種倉儲調度方法、一種倉儲調度裝置、一種電子設備、一種非瞬時計算機可讀存儲介質、以及一種計算機程序產品,有助于在保留倉儲空間內的揀選操作的情況下,提高倉儲空間的空間利用率。
2、在本技術的一個實施例中,提供了一種倉儲系統,包括:
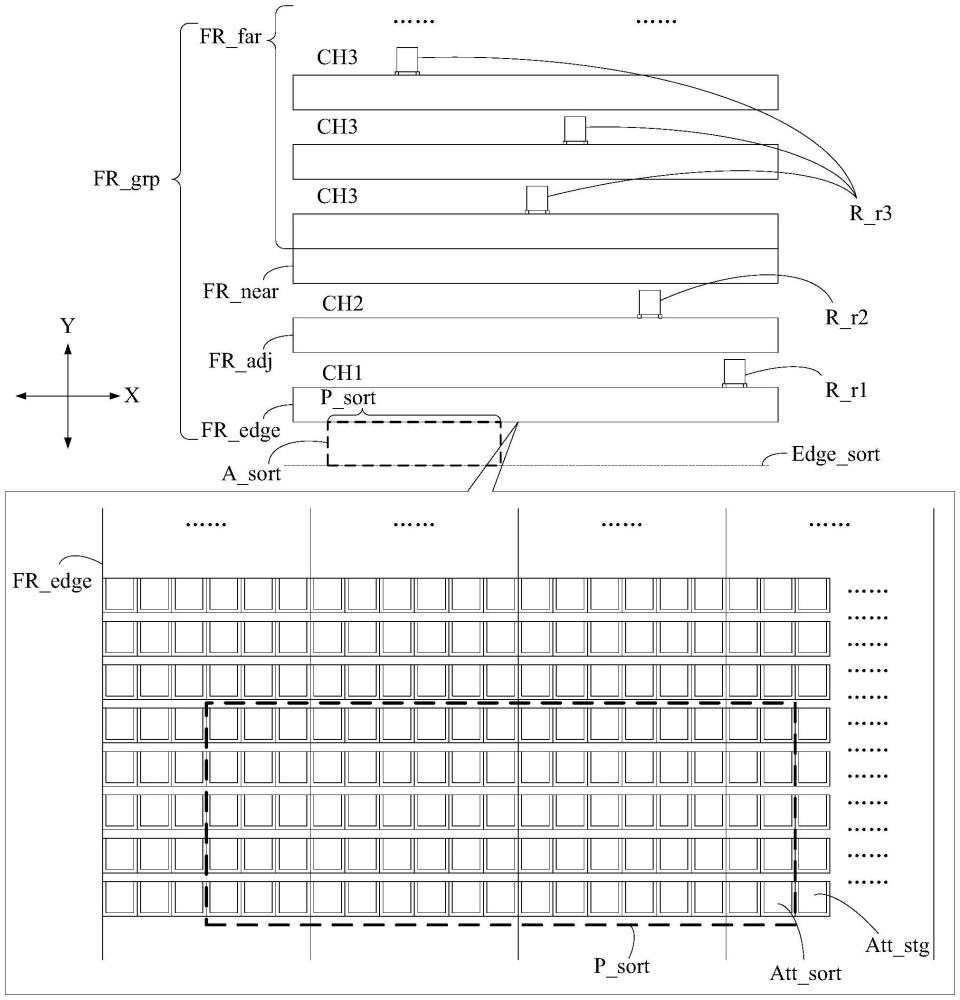
3、貨架排組,所述貨架排組位于倉儲空間內,所述貨架排組包括至少兩排貨架,所述至少兩排貨架中的每一排貨架均具有用于貯存貨物單元的貯存儲位,每一排貨架的貯存儲位均在該排貨架的兩側貨架立面之間貫通,所述至少兩排貨架包括最靠近所述倉儲空間的選定空間邊界的一排邊緣貨架,所述邊緣貨架朝向所述選定空間邊界的一側貨架立面的局部區域被設定為揀選操作面,所述邊緣貨架的貯存儲位分布在所述揀選操作面的范圍之外,所述邊緣貨架還具有分布在所述揀選操作面的范圍之內的揀選儲位,揀選儲位用于暫存在所述揀選操作面被揀選的所述貨物單元,并且,揀選儲位在所述邊緣貨架的兩側貨架立面之間貫通;
4、機器人群組,所述機器人群組包括第一軌道機器人,并且,所述第一軌道機器人可移動地部署在所述邊緣貨架背向所述選定邊界的另一側貨架立面;
5、調度管理平臺,用于向所述機器人群組下達出入倉搬運調度任務,使所述第一軌道機器人在所述出入倉搬運調度任務指定的揀選儲位執行對所述貨物單元的取放操作,以實現所述貨物單元在所述揀選操作面和所述出入倉搬運調度任務指定的貯存儲位之間的出入倉搬運。
6、在一些示例中,可選地,所述揀選操作面在所述邊緣貨架的高度方向和寬度方向中的至少一個方向上的尺寸,小于所述外側貨架立面在對應方向上的尺寸。
7、在一些示例中,可選地,揀選儲位包括在高度方向上從所述邊緣貨架的最底層向上連續排布的至少兩層。
8、在一些示例中,可選地,所述揀選操作面與所述選定空間邊界之間預留有人工分揀操作空間,并且,所述人工分揀操作空間在垂直于所述邊緣貨架的貨架立面的深度方向上的深度尺寸,小于所述人工分揀操作空間在所述邊緣貨架的寬度方向上的寬度尺寸。
9、在一些示例中,可選地,所述至少兩排貨架的其中至少一排的貯存儲位為雙深儲位,所述雙深儲位具有在垂直于貨架立面的深度方向上貫通的兩個單位儲位空間,并且,每個所述單位儲位空間用于貯存一個所述貨物單元。
10、在一些示例中,可選地,所述至少兩排貨架均平行于所述選定空間邊界。
11、在一些示例中,可選地,所述出入倉搬運用于實現所述貨物單元從所述出入倉搬運調度任務指定的揀選儲位到貯存儲位的入倉搬運,或者,所述貨物單元從所述出入倉搬運調度任務指定的貯存儲位到揀選儲位的出倉搬運。
12、在一些示例中,可選地,所述出入倉搬運調度任務指定的揀選儲位由在所述揀選操作面實施的人機交互操作確定。
13、在一些示例中,可選地,所述出入倉搬運調度任務指定的貯存儲位由所述調度管理平臺確定。
14、在一些示例中,可選地,所述邊緣貨架的貯存儲位的儲位類別為第一類貯存儲位,所述出入倉搬運調度任務包括出入倉單機調度任務,并且,所述出入倉單機調度任務用于使所述第一軌道機器人通過獨立執行第一出入倉操作組合,完成所述貨物單元在所述出入倉單機調度指定的揀選儲位和所述第一類貯存儲位之間的出入倉搬運;其中,所述第一出入倉操作組合包括:所述第一軌道機器人在所述出入倉單機調度任務指定的揀選儲位,對所述貨物單元執行的第一取放操作;以及,所述第一軌道機器人在所述出入倉單機調度任務指定的所述第一類貯存儲位,對所述貨物單元執行的第二取放操作,并且,所述第二取放操作和所述第一取放操作為互逆操作。
15、在一些示例中,可選地,所述至少兩排貨架還包括與所述邊緣貨架相鄰的一排鄰域貨架,所述鄰域貨架位于所述邊緣貨架背向所述選定空間邊界的一側,所述鄰域貨架與所述邊緣貨架之間具有用于供所述第一軌道機器人移動的第一通道,并且,所述鄰域貨架的貯存儲位的儲位類別為所述第一類貯存儲位;其中,當所述出入倉單機調度任務指定的所述第一類貯存儲位位于所述鄰域貨架時,所述第一出入倉操作組合還包括:所述第一軌道機器人在所述第一通道內的第一轉向操作,所述第一轉向操作的執行時機位于所述第一取放操作和所述第二取放操作之間,并且,所述第一轉向操作使所述貨物單元在被執行所述第一取放操作和所述第二取放操作時的擺放方位相反。
16、在一些示例中,可選地,所述至少兩排貨架還包括與所述鄰域貨架相鄰的一排近端貨架,所述近端貨架位于所述鄰域貨架背向所述邊緣貨架的一側,所述機器人群組還包括第二軌道機器人,所述第二軌道機器人可移動地部署在所述鄰域貨架朝向所述近端貨架的一側貨架立面、或位于所述近端貨架朝向所述鄰域貨架的一側貨架立面,并且,所述鄰域貨架與所述近端貨架之間具有用于供所述第二軌道機器人移動的第二通道;所述近端貨架的貯存儲位的儲位類別為第二類貯存儲位,所述出入倉搬運調度任務包括同時下達給所述第一軌道機器人和所述第二軌道機器人的出入倉接力調度任務,并且,所述出入倉接力調度任務用于使所述第一軌道機器人和所述第二軌道機器人通過協同執行第二出入倉操作組合,完成所述貨物單元在所述出入倉接力調度指定的揀選儲位和所述第二類貯存儲位之間的出入倉搬運;其中,所述第二出入倉操作組合包括:所述第一軌道機器人在所述出入倉接力調度任務指定的揀選儲位,對所述貨物單元的第一取放操作;所述第一軌道機器人和所述第二軌道機器人在所述出入倉接力調度任務指定的第一交接位置,對所述貨物單元的第一交接操作;所述第二軌道機器人在所述出入倉接力調度任務指定的所述第二類貯存儲位,對所述貨物單元的第三取放操作,并且,所述第三取放操作和所述第一取放操作為互逆操作;所述第一軌道機器人在所述第一通道內的第一轉向操作,所述第一轉向操作的執行時機位于所述第一取放操作和所述第一交接操作之間,并且,所述第一轉向操作使所述貨物單元在被執行所述第一取放操作和所述第二取放操作時的擺放方位相反;以及,所述第二軌道機器人在所述第二通道內的第二轉向操作,所述第二轉向操作的執行時機位于所述第一交接操作和所述第三取放操作之間,并且,所述第二轉向操作使所述貨物單元在被執行所述第一交接操作和所述第三取放操作時的擺放方位相反。
17、在一些示例中,可選地,所述第一軌道機器人和所述第二軌道機器人的所述第一交接位置位于所述鄰域貨架中被所述出入倉接力調度任務指定的貯存儲位。
18、在一些示例中,可選地,所述至少兩排貨架還包括至少一排所述遠端貨架,所述遠端貨架位于所述鄰域貨架背向所述邊緣貨架的一側,所述機器人群組還包括地面搬運機器人和第三軌道機器人,所述地面搬運機器人獨立于所述至少兩排貨架自由移動,并且,所述第三軌道機器人可移動地部署在所述遠端貨架的一側貨架立面;所述遠端貨架的貯存儲位的儲位類別為第三類貯存儲位,所述出入倉搬運調度任務包括同時下達給所述第一軌道機器人、所述地面搬運機器人以及所述第三軌道機器人的出入倉協同調度任務,并且,所述出入倉協同調度任務用于使所述第一軌道機器人、所述地面搬運機器人以及所述第三軌道機器人通過協同執行第三出入倉操作組合,完成所述貨物單元在所述出入倉協同調度指定的揀選儲位和所述第三類貯存儲位之間的所述出入倉搬運;其中,所述第三出入倉操作組合包括:所述第一軌道機器人在所述出入倉協同調度任務指定的揀選儲位,對所述貨物單元的第一取放操作;所述第一軌道機器人和所述地面搬運機器人在所述出入倉協同調度任務指定的第二交接位置,對所述貨物單元的第二交接操作;所述地面搬運機器人和所述第三軌道機器人在所述出入倉協同調度任務指定的第三交接位置,對所述貨物單元的第三交接操作;以及,所述第三軌道機器人在所述出入倉協同調度任務指定的所述第三類貯存儲位,對所述貨物單元的第四取放操作,并且,所述第四取放操作和所述第一取放操作為互逆操作。
19、在一些示例中,可選地,所述至少兩排貨架還包括一排近端貨架,所述近端貨架位于所述鄰域貨架背向所述邊緣貨架的一側,并且,所述遠端貨架位于所述近端貨架背向所述鄰域貨架的一側;其中:與所述近端貨架相鄰的一排所述遠端貨架與所述近端貨架貼靠布置;和/或,所述第三軌道機器人可移動地部署在所述遠端貨架背向所述近端貨架的一側貨架立面;和/或,所述遠端貨架為至少兩排,每兩排相鄰的所述遠端貨架之間具有用于供所述第三軌道機器人移動的第三通道。
20、在一些示例中,可選地,所述第一軌道機器人和所述地面搬運機器人的所述第二交接位置位于所述第一通道或所述第二通道中;或者,所述鄰域貨架和/或所述邊緣貨架中最底層的貯存儲位的下方還具有吊裝儲位或梳齒懸臂,并且,所述第一軌道機器人和所述地面搬運機器人的所述第二交接位置,位于所述鄰域貨架或所述邊緣貨架的下方被所述出入倉協同調度任務指定的吊裝儲位或梳齒懸臂。
21、在一些示例中,可選地,所述第一軌道機器人和所述地面搬運機器人的所述第三交接位置位于所述第三通道中;或者,所述遠端貨架中最底層的貯存儲位的下方還具有吊裝儲位或梳齒懸臂,并且,所述地面搬運機器人和所述第三軌道機器人的所述第三交接位置,位于所述遠端貨架的下方被所述出入倉協同調度任務指定的吊裝儲位或梳齒懸臂。
22、在一些示例中,可選地,所述調度管理平臺還用于:基于在任意一個揀選儲位內等待入倉的所述貨物單元的預測出倉頻率,確定所述貨物單元的匹配儲位類別;以及,在所述貨物單元的匹配儲位類別的貯存儲位中,選擇所述出入倉搬運調度任務指定的貯存儲位。
23、在一些示例中,可選地,所述倉儲空間包括在遠離所述選定空間邊界的方向上依次排列的第一空間、第二子空間以及第三子空間,所述至少兩排貨架中位于所述第一子空間內的每排貨架的貯存儲位的儲位類別均為第一類貯存儲位,所述邊緣貨架位于所述第一子空間內,所述至少兩排貨架中位于所述第二子空間內的每排貨架的貯存儲位的儲位類別均為第二類貯存儲位,所述至少兩排貨架中位于所述第三子空間內的每排貨架的貯存儲位的儲位類別為均第三類貯存儲位;并且:若所述預測出倉頻率大于預設的第一頻率域值,則,所述貨物單元的匹配儲位類別為所述第一類貯存儲位;若所述預測出倉頻率小于等于所述第一頻率域值、且大于等預設的第二頻率域值,則,所述貨物單元的匹配儲位類別為所述第二類貯存儲位;若所述預測出倉頻率小于所述第二頻率域值,則,所述貨物單元的匹配儲位類別為所述第三類貯存儲位。
24、在一些示例中,可選地,所述倉儲空間包括與所述選定空間邊界相鄰的第一子空間、以及相比于所述第一子空間遠離所述選定空間邊界的第二子空間或第三子空間,所述至少兩排貨架中位于所述第一子空間內的每排貨架的貯存儲位的儲位類別均為第一類貯存儲位,所述邊緣貨架位于所述第一子空間內,所述至少兩排貨架中位于所述第二子空間內的每排貨架的貯存儲位的儲位類別均為第二類貯存儲位,所述至少兩排貨架中位于所述第三子空間內的每排貨架的貯存儲位的儲位類別為第三類貯存儲位;并且:若所述預測出倉頻率大于預設的第一頻率域值,則,所述貨物單元的匹配儲位類別為所述第一類貯存儲位;若所述預測出倉頻率小于等于所述第一頻率域值,則,所述貨物單元的匹配儲位類別為所述第二類貯存儲位或所述第三類貯存儲位。
25、在一些示例中,可選地,所述調度管理平臺還用于:響應于已貯存在任意一個貯存儲位的所述貨物單元的理貨條件觸發,向所述機器人群組下達理貨搬運調度任務,以實現所述貨物單元在所述理貨搬運調度任務指定的不同貯存儲位之間的理貨搬運。
26、在一些示例中,可選地,所述至少兩排貨架的其中至少一排的貯存儲位為雙深儲位,所述雙深儲位具有在垂直于貨架立面的深度方向上貫通的兩個單位儲位空間,每個所述單位儲位空間用于貯存一個所述貨物單元,所述理貨觸發條件包括被動理貨觸發條件,所述被動理貨觸發條件用于表征:已貯存在所述雙深儲位的一個所述單位儲位空間內的所述貨物單元,阻礙所述雙深儲位中空閑的另一個所述單位儲位空間的出入倉搬運,并且,所述理貨搬運調度任務指定的不同貯存儲位的儲位類別相同。
27、在一些示例中,可選地,用于貯存所述貨物單元的貯存儲位的儲位類別為所述貨物單元的匹配儲位類別,所述貨物單元的匹配儲位類別與所述貨物單元的預測出倉頻率關聯,所述理貨觸發條件包括主動理貨觸發條件,所述主動理貨觸發條件用于表征:已貯存在任意一個貯存儲位的所述貨物單元的匹配儲位類別由于所述預測出倉頻率發生變化而變化,并且,所述理貨搬運調度任務指定的不同貯存儲位的儲位類別不同。
28、在一些示例中,可選地,所述至少兩排貨架還包括一排鄰域貨架、一排近端貨架以及至少一排遠端貨架,所述鄰域貨架位于所述邊緣貨架背向所述選定空間邊界的一側,所述鄰域貨架與所述邊緣貨架之間具有用于供所述第一軌道機器人移動的第一通道,并且,所述近端貨架位于所述鄰域貨架背向所述邊緣貨架的一側,所述遠端貨架位于所述近端貨架背向所述邊緣貨架的一側;所述邊緣貨架和所述鄰域貨架均位于所述第一子空間內,所述邊緣貨架和所述鄰域貨架的貯存儲位的儲位類別為第一類貯存儲位,所述近端貨架位于所述第二子空間內,所述近端貨架的貯存儲位的儲位類別為第二類貯存儲位,所述遠端貨架位于所述第三子空間內,并且,所述遠端貨架的貯存儲位的儲位類別為第三類貯存儲位;所述機器人群組還包括第二軌道機器人、地面搬運機器人以及第三軌道機器人,所述第二軌道機器人可移動地部署在所述鄰域貨架朝向所述近端貨架的一側貨架立面、或位于所述近端貨架朝向所述鄰域貨架的一側貨架立面,所述鄰域貨架與所述近端貨架之間具有用于供所述第二軌道機器人移動的第二通道,所述地面搬運機器人獨立于所述至少兩排貨架自由移動,并且,所述第三軌道機器人可移動地部署在所述遠端貨架的一側貨架立面。
29、在一些示例中,可選地,所述理貨搬運調度任務包括響應于所述被動理貨觸發條件下達的被動理貨搬運調度任務,并且,所述被動理貨搬運調度任務用于使所述第一軌道機器人、或所述第二軌道機器人、或所述第三軌道機器人獨立在相同儲位類別的兩個貯存儲位對同一個所述貨物單元執行互逆的兩次取放操作。
30、在一些示例中,可選地,所述理貨搬運調度任務包括響應于所述主動理貨觸發條件下達的主動理貨搬運調度任務,并且,所述主動理貨搬運調度任務包括第一主動理貨搬運調度任務、第二主動理貨搬運調度任務以及第三主動理貨搬運調度任務中的至少之一。
31、在一些示例中,可選地,所述第一主動理貨搬運調度任務用于使所述第一軌道機器人和所述第二軌道機器人通過協同執行第一主動理貨操作組合,完成所述貨物單元在所述第一主動理貨搬運調度任務指定的所述第一類貯存儲位和所述第二類貯存儲位之間的理貨搬運;其中,所述第一主動理貨操作組合包括:所述第一軌道機器人在所述第一理貨搬運調度任務在所述邊緣貨架指定的所述第一類貯存儲位,對所述貨物單元的第二取放操作;所述第一軌道機器人和所述第二軌道機器人在所述第一主動理貨搬運調度任務指定的第一交接位置,對所述貨物單元的第一交接操作;所述第二軌道機器人在所述第一理貨搬運調度任務指定的所述第二類貯存儲位,對所述貨物單元執行的第三取放操作,并且,所述第二取放操作和所述第三取放操作為互逆操作;所述第一軌道機器人在所述第一通道內的第一轉向操作,所述第一轉向操作的執行時機位于所述第一取放操作和所述第二取放操作之間,并且,所述第一轉向操作使所述貨物單元在被執行所述第一取放操作和所述第二取放操作時的擺放方位相反;以及,所述第二軌道機器人在所述第二通道內的第二轉向操作,所述第二轉向操作的執行時機位于所述第一交接操作和所述第三取放操作之間,并且,所述第二轉向操作使所述貨物單元在被執行所述第一交接操作和所述第三取放操作時的擺放方位相反。
32、在一些示例中,可選地,所述第二主動理貨搬運調度任務用于使所述第二軌道機器人、所述地面搬運機器人以及所述第三軌道機器人通過協同執行第二主動理貨操作組合,完成所述貨物單元在所述第二主動理貨搬運調度任務指定的所述第二類貯存儲位和所述第三類貯存儲位之間的理貨搬運;其中,所述第二主動理貨操作組合包括:所述第二軌道機器人在所述第二理貨搬運調度任務指定的所述第二類貯存儲位,對所述貨物單元的第五取放操作;所述第二軌道機器人和所述地面搬運機器人在所述第二理貨搬運調度任務指定的第四交接位置,對所述貨物單元的第四交接操作;所述地面搬運機器人和所述第三軌道機器人在所述第二主動理貨搬運調度任務指定的第三交接位置,對所述貨物單元的第三交接操作;以及,所述第三軌道機器人在所述第二理貨搬運調度任務指定的所述第三類貯存儲位,對所述貨物單元的第四取放操作,并且,所述第四取放操作和所述第五取放操作為互逆操作。
33、在一些示例中,可選地,所述第三主動理貨搬運調度任務用于使所述第一軌道機器人、所述地面搬運機器人以及所述第三軌道機器人通過協同執行第三主動理貨操作組合,完成所述貨物單元在所述第三主動理貨搬運調度任務指定的所述第一類貯存儲位和所述第三類貯存儲位之間的理貨搬運;其中,所述第三主動理貨操作組合包括:所述第一軌道機器人在所述第三理貨搬運調度任務指定的所述第一類貯存儲位,對所述貨物單元的第二取放操作;所述第一軌道機器人和所述地面搬運機器人在所述第三主動理貨搬運調度任務指定的第二交接位置,對所述貨物單元的第二交接操作;所述地面搬運機器人和所述第三軌道機器人在所述第三理貨搬運調度任務指定的第三交接位置,對所述貨物單元的第三交接操作;以及,所述第三軌道機器人在所述第三主動理貨搬運調度任務指定的所述第三類貯存儲位,對所述貨物單元的第四取放操作,并且,所述第二取放操作和所述第四取放操作為互逆操作。
34、在一些示例中,可選地,所述鄰域貨架以及所述遠端貨架中最底層的貯存儲位的下方均具有吊裝儲位或梳齒懸臂,并且:所述第一軌道機器人和所述第二軌道機器人的所述第一交接位置,位于所述鄰域貨架中被所述出入倉接力調度任務指定的貯存儲位;和/或,所述第一軌道機器人和所述地面搬運機器人的所述第二交接位置位于所述第一通道或所述第二通道中;或者,所述第一軌道機器人和所述地面搬運機器人的所述第二交接位置,位于所述鄰域貨架或所述邊緣貨架的下方被所述第三主動理貨搬運調度任務指定的吊裝儲位或梳齒懸臂;和/或,所述第二軌道機器人和所述地面搬運機器人的所述第四交接位置位于所述第二通道中;或者,所述第二軌道機器人和所述地面搬運機器人的所述第四交接位置,位于所述鄰域貨架的下方被所述第二主動理貨搬運調度任務指定的吊裝儲位或梳齒懸臂;和/或,所述第三軌道機器人和所述地面搬運機器人的所述第三交接位置位于所述第三通道中;或者,所述第三軌道機器人和所述地面搬運機器人的所述第三交接位置,位于所述遠端貨架的下方被所述第二主動理貨搬運調度任務或所述第三主動理貨搬運調度任務指定的吊裝儲位或梳齒懸臂。
35、在本技術的另一個實施例中,還提供了一種倉儲調度方法,包括:
36、獲取對倉儲空間內的貨架排組的儲位配置文件;其中,所述貨架排組位于倉儲空間內,所述貨架排組包括至少兩排貨架,所述至少兩排貨架中的每一排貨架均具有用于貯存貨物單元的貯存儲位,所述至少兩排貨架包括最靠近所述倉儲空間的選定空間邊界的一排邊緣貨架,所述邊緣貨架朝向所述選定空間邊界的一側貨架立面的局部區域被設定為揀選操作面,所述邊緣貨架的貯存儲位分布在所述揀選操作面的范圍之外,所述邊緣貨架還具有分布在所述揀選操作面的范圍之內的揀選儲位,揀選儲位用于暫存在所述揀選操作面被揀選的所述貨物單元,并且,所述儲位配置文件用于確定揀選儲位和貯存儲位的空間位置信息;
37、依據所述儲位配置文件,向機器人群組下達出入倉搬運調度任務;其中,所述機器人群組包括第一軌道機器人,所述第一軌道機器人可移動地部署在所述邊緣貨架背向所述選定邊界的另一側貨架立面,并且,所述出入倉搬運調度任務用于使所述第一軌道機器人在所述出入倉搬運調度任務指定的揀選儲位執行對所述貨物單元的取放操作,以實現所述貨物單元在所述揀選操作面和所述出入倉搬運調度任務指定的貯存儲位之間的出入倉搬運。
38、在本技術的另一個實施例中,還提供了一種倉儲調度裝置,包括:
39、配置獲取模塊,用于獲取對倉儲空間內的貨架排組的儲位配置文件;其中,所述貨架排組位于倉儲空間內,所述貨架排組包括至少兩排貨架,所述至少兩排貨架中的每一排貨架均具有用于貯存貨物單元的貯存儲位,所述至少兩排貨架包括最靠近所述倉儲空間的選定空間邊界的一排邊緣貨架,所述邊緣貨架朝向所述選定空間邊界的一側貨架立面的局部區域被設定為揀選操作面,所述邊緣貨架的貯存儲位分布在所述揀選操作面的范圍之外,所述邊緣貨架還具有分布在所述揀選操作面的范圍之內的揀選儲位,揀選儲位用于暫存在所述揀選操作面被揀選的所述貨物單元,并且,所述儲位配置文件用于確定揀選儲位和貯存儲位的空間位置信息;
40、任務發生模塊,用于依據所述儲位配置文件,向機器人群組下達出入倉搬運調度任務;其中,所述機器人群組包括第一軌道機器人,所述第一軌道機器人可移動地部署在所述邊緣貨架背向所述選定邊界的另一側貨架立面,并且,所述出入倉搬運調度任務用于使所述第一軌道機器人在所述出入倉搬運調度任務指定的揀選儲位執行對所述貨物單元的取放操作,以實現所述貨物單元在所述揀選操作面和所述出入倉搬運調度任務指定的貯存儲位之間的出入倉搬運。
41、在本技術的另一個實施例中,還提供了一種電子設備,包括處理器,所述處理器用于執行如前述實施例所述的倉儲調度方法。
42、在本技術的另一個實施例中,還提供了一種非瞬時計算機可讀存儲介質,該非瞬時計算機可讀存儲介質存儲指令,所述指令在由處理器執行時使得處理器執行如前述實施例所述的倉儲調度方法。
43、在本技術的另一個實施例中,還提供了一種計算機程序產品,包括計算機可執行指令,所述計算機可執行指令在被處理器執行時實現如前述實施例所述的倉儲調度方法。
44、如上可見,本技術的實施例可以不在貨架排組與倉儲空間的空間邊界之間部署揀選操作臺和疏散通行區域,并且,揀選操作臺和疏散通行區域在倉儲空間的占地面積可以用于增加貨架排組的貨架數量。在貨架數量增加后的貨架排組中,最靠近選定空間邊界的邊緣貨架的貨架立面的一部分可以配置為用于替代揀選操作臺的水平臺面的揀選操作面,邊緣貨架中位于揀選操作面的范圍內的一部分儲位可以被配置為用于暫存在揀選操作面被揀選的貨物單元的揀選儲位,邊緣貨架的貨架立面還可以部署第一軌道機器人,并且,利用第一軌道機器人在揀選儲位對貨物單元的取放操作,可以實現貨物單元在揀選操作面和貯存儲位之間的出入倉搬運。從而,本技術的實施例可以在保留倉儲空間內的揀選操作的情況下,提高倉儲空間的空間利用率。
- 還沒有人留言評論。精彩留言會獲得點贊!