一種同時對托盤及其上的鋼桶進行對中調節的方法與流程
本發明涉及自動化,尤其涉及一種同時對托盤及其上的鋼桶進行對中調節的方法。
背景技術:
1、在灌裝運輸領域,除了大型的油罐車運輸液體,還有將化學物料充填到鋼桶中,然后將鋼桶碼放在車廂內進行運輸。鋼桶運輸的過程中,通常要先將鋼桶碼放在托盤上,然后再由叉車將托盤叉起并移載到車廂中。
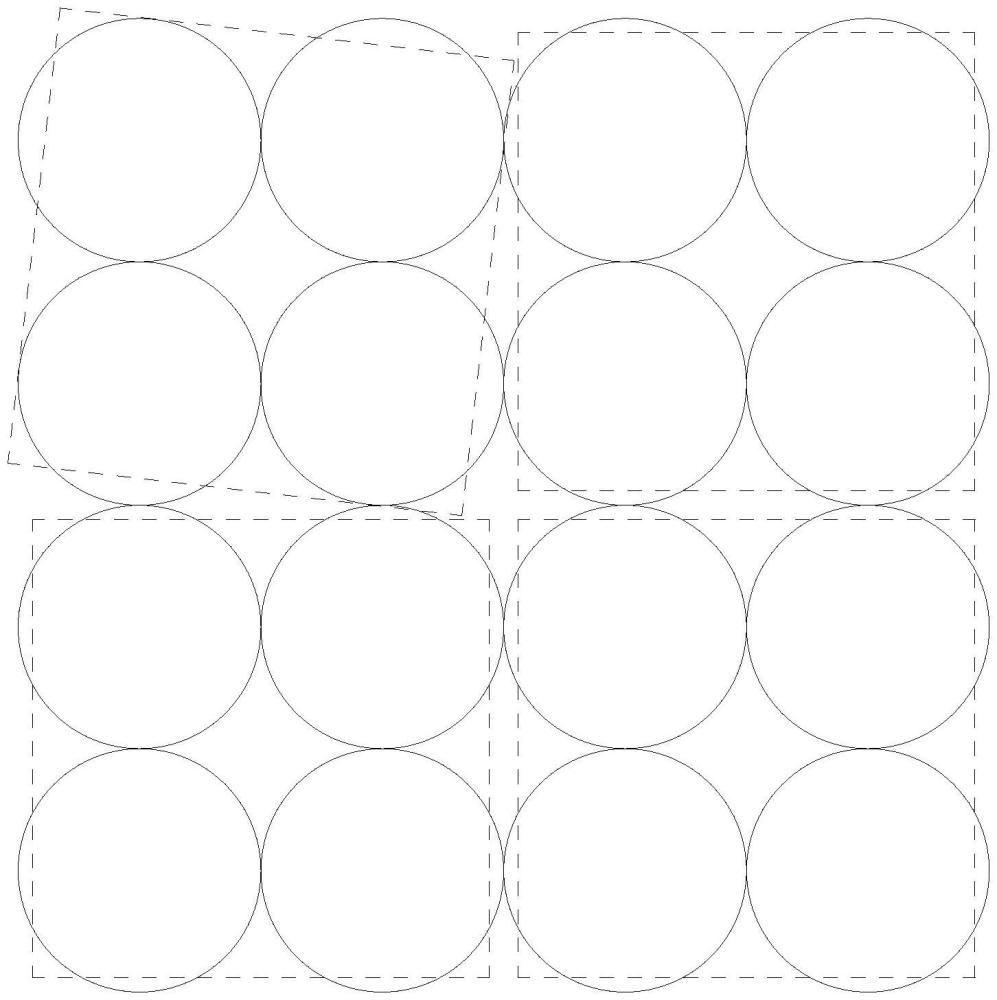
2、現有技術有人研發了針對鋼桶進行調整的裝置,但是在實際工作過程中,僅移動鋼桶是不夠的,還需要對托盤進行調節,否則鋼桶在托盤上的位置容易偏移,就會產生如圖3中左上角的托盤扭轉的問題。一旦這樣問題出現,托盤的底部可能就會與其他托盤上的鋼桶產生干涉,從而影響其他托盤鋼桶的碼放;而即使碼放成功了,在將鋼桶從車廂中卸貨時,還需要再次借助叉車叉起托盤及其上的鋼桶,而由于托盤上還與其他托盤的鋼桶產生重疊,所以叉車在叉起托盤之后,將托盤提起的過程中,會導致其他托盤上的鋼桶翻倒或被帶動,就使得卸貨無法繼續進行。
技術實現思路
1、為了解決現有技術存在的問題,本發明提供一種同時對托盤及其上的鋼桶進行對中調節的方法,解決同時對托盤和鋼桶調節時,托盤和鋼桶之間的摩擦阻礙調節,并且很難實現對中的問題。
2、為實現上述目的,提供以下技術方案:
3、一種同時對托盤及其上的鋼桶進行對中調節的方法,包括:
4、步驟a、輸送輥道(9100)獲得載有鋼桶(11)的托盤(10),并由輸送輥道(9100)向前輸送到預定工位,停止等待調整;
5、步驟b、操作縱移支架(9500)沿著支架導軌移動到托盤(10)的上方,并由圖像裝置對下方的托盤(10)及其上的鋼桶(11)進行拍攝圖像;
6、步驟c、識別圖像中托盤(10)四個頂點的坐標和四個鋼桶(11)的圓心坐標;判斷托盤(10)的第一偏移角度、四個鋼桶(11)的中心點和四個鋼桶(11)的第二偏移角度,并發送給控制器;
7、步驟d、由縱移支架(9500)帶動旋轉驅動機構(9900)的中心移動到四個鋼桶(11)的中心點,然后由控制器控制旋轉驅動機構(9900),帶動四個鋼桶夾爪(9600)正向轉動第二偏移角度,以與鋼桶(11)上下正對應;
8、步驟e、控制四個鋼桶夾爪(9600)下行并夾持四個鋼桶(11),然后對四個鋼桶施加不大于四個鋼桶(11)總重量的提升力,使四個鋼桶(11)仍坐落在托盤(10)上;
9、步驟f、控制四個橫向對中調節機構(9300)和兩個縱向對中調節機構(9200)一起推動托盤(10)和鋼桶(11),同時由旋轉驅動機構(9900)反向轉動驅動四個鋼桶(11)轉動第二偏移角度。
10、步驟a中,利用輸送輥道兩側的光柵結構檢測到托盤時,發送第一信號給控制器,由控制器控制輸送輥道停止。
11、步驟b中,圖像裝置在縱移支架(9500)沿著導軌移動至托盤(10)的上方時開始連續拍照,并對每個照片中的托盤(10)和鋼桶(11)的投影面積進行計算,且篩選其中投影面積最小的照片作為識別圖像的參考照片。
12、步驟c還包括,確定托盤(10)的中心點,并判斷該中心點在縱向方向上與橫向對中調節機構(9300)的坐標中心的距離d;
13、對應地,步驟f還包括,驅動輸送輥道(9100)帶動托盤(10)移動距離d,使托盤(10)的中心點在縱向方向上與橫向對中調節機構(9300)的坐標中心對齊。
14、步驟d還包括,當四個鋼桶(11)的中心點的橫坐標不在輸送輥道的中心線時,控制橫移機構(9400)帶動旋轉驅動機構(9900)橫向移動到四個鋼桶(11)的中心點的橫坐標位置。
15、步驟e還包括,獲取輸送輥道(9100)上的受力作用,當輸送輥道(9100)上的受力小于托盤和空的鋼桶重量之和時,保持提升力。
16、提升力是通過第一升降驅動機構或第二升降驅動機構提供。
17、步驟f還包括,釋放提升力,之后使鋼桶夾爪與鋼桶分離,并將橫向對中調節機構和縱向對中調節機構復位。
18、所述同時對托盤及其上的鋼桶進行對中調節的方法,使用同時對托盤及其上的鋼桶進行對中調節設備。
19、本發明還提供一種同時對托盤及其上的鋼桶進行對中調節設備,包括縱移支架(9500)及支架導軌,縱移支架(9500)滾動連接在支架導軌上;
20、輸送輥道(9100),位于縱移支架(9500)的下方,并且輸送輥道(9100)輸送方向與縱移支架(9500)的移動方向相同,用于輸送載有鋼桶(11)的托盤(10);
21、橫向對中調節機構(9300),具有兩個,安裝在輸送輥道(9100)的兩側,用于對輸送輥道(9100)一側的前后兩個鋼桶(11)向中間對中調節;
22、縱向對中調節機構(9200),具有四個,兩兩成對地布置在輸送輥道(9100)的兩側,并且位于橫向對中調節機構(9300)的下方,其高度同時與托盤(10)及鋼桶(11)的底部對齊,用于將托盤(10)和鋼桶(11)推向輸送輥道(9100)的中間位置;
23、圖像裝置,安裝在縱移支架(9500)上,能夠向下拍攝輸送輥道(9100)上的托盤(10)和鋼桶(11),識別托盤(10)的四個頂點和四個鋼桶(11)的圓心,并發送給控制器;
24、鋼桶夾爪(9600),具有四個,每個夾爪與一個鋼桶(11)的位置對應;
25、旋轉驅動機構(9900),用于帶動四個鋼桶夾爪控制四個鋼桶(11)整體轉向,使四個鋼桶(11)位于托盤(10)的正中并與托盤(10)的方向對齊;
26、第一升降驅動機構(9800),安裝在縱移支架(9500),旋轉驅動機構(9900)安裝在第一升降驅動機構(9800)的底部,第一升降驅動機構(9800)用于驅動旋轉驅動機構(9900)的升降;
27、橫移機構(9400),用于通過第一升降驅動機構(9800)、旋轉驅動機構(9900)帶動四個鋼桶(11)橫向移動到托盤(10)的中心。
28、還包括:第二升降驅動機構(9700),具有四個,與鋼桶夾爪(9600)對應,鋼桶夾爪(9600)通過第二升降驅動機構(9700)連接在旋轉驅動機構(9900)。
29、縱向對中調節機構(9200)包括前后兩個收攏撥桿(9210),每個收攏撥桿(9210)能夠翻轉而達到水平和豎直兩種狀態;
30、所述橫向對中調節機構(9300)包括對中調節模塊(9310)、推送氣缸(9320)和推送導柱(9330),其中所述對中調節模塊(9310)的后端與所述推送氣缸(9320)和推送導柱(9330)連接,所述橫向對中調節機構(9300)的對中調節模塊(9310)將輸送輥道(9100)上的托盤(10)及其上的鋼桶(11)從兩側向輸送輥道(9300)的中間位置對中推送。
31、所述對中調節模塊(9310)包括下部與托盤抵接的托盤抵接部(9311)和上部與鋼桶抵接的鋼桶矯正部(9312)。
32、進一步優選地,所述鋼桶矯正部(9312)相對于所述托盤抵接部(9311)的位置向內收,從而使鋼桶的邊緣能夠凸出于托盤的邊緣;
33、進一步優選地,所述托盤抵接部(9311)為一平面,且與輸送輥道(9100)的縱向平行;
34、進一步優選地,所述鋼桶矯正部(9312)為與鋼桶表面弧度相同的弧面,或者為兩個豎直布置的圓輥。
35、所述鋼桶夾爪(9600)為三爪結構,并且每個鋼桶夾爪(9600)中的一個爪的方向指向四個鋼桶夾爪(9600)的中心。
36、所述鋼桶夾爪(9600)的中心設有防撞墊(9610),并在防撞墊(9610)外側還設有伸縮觸碰頭(9620),所述伸縮觸碰頭(9620)能夠上下伸縮,并且所述伸縮觸碰頭(9620)的底部的高度低于所述防撞墊(9610)的高度,從而使所述伸縮觸碰頭(9620)能夠先于所述防撞墊(9610)與鋼桶的頂部接觸;所述伸縮觸碰頭(9620)與控制器連接,控制器的功能之一為控制第二升降驅動機構(9700)和/或第一升降驅動機構(9800)的動作。
37、所述第一升降驅動機構(9800)包括轉盤(9810)和升降機構(9830),四個鋼桶夾爪(9600)安裝在所述轉盤(9810)上;從而由所述轉盤(9810)帶動鋼桶夾爪在水平面做周向轉動;轉盤(9810)安裝在升降機構(9830)的底部。
38、所述第一升降驅動機構(9800)還包括橫向導軌(9820),所述橫向導軌(9820)安裝在所述支架(9500)上,所述升降機構(9830)連接在所述橫向導軌(9820)上,從而使升降機構(9830)能夠沿著所述橫向導軌(9820)做橫向運動。
39、所述縱向對中調節機構(9200)還包括翻轉驅動體(9220)、滑動連接板(9230)、支撐橫桿(9240)、聯動翻轉板(9250)、伸縮導軌(9260)、連桿(9270)、收攏驅動氣缸(9280)、收攏驅動桿(9290)。
40、所述旋轉驅動機構(9900)包括驅動小齒輪(9910)、驅動轉盤(9920)和旋轉驅動電機(9930),其中,旋轉驅動電機(9930)通過驅動小齒輪(9910)帶動驅動轉盤(9920)轉動。
41、所述第二升降驅動機構(9700)采用氣缸驅動。
42、當鋼桶夾爪(9600)夾持住鋼桶(11)之后,由第一升降驅動機構(9800)或第二升降驅動機構(9700)向上提升,以使鋼桶(11)壓在托盤(10)上的壓力減小,并且提升力小于鋼桶(11)滿桶后的重力,以使鋼桶(11)仍然與托盤(10)接觸不分離,然后再通過成對的橫向對中調節機構(9300)驅動對中調節模塊(9310),以使鋼桶(11)和托盤(10)對中調節;并且此時通過橫移機構(9400)橫向驅動第一升降驅動機構(9800)以帶動四個鋼桶夾爪(9600)隨著橫向對中調節機構(9300)的動作而與鋼桶(11)同步移動。
43、與現有技術相比,本發明的優點如下:
44、本發明提供的同時對托盤及其上的鋼桶進行對中調節的方法,能夠同時將托盤及其上的鋼桶進行對中調整,特別是在對托盤和鋼桶對中調整的過程中,利用鋼桶夾爪將鋼桶向上提拉,使鋼桶與托盤之間的壓力減小,從而便于鋼桶和托盤之間的相互移動;在對鋼桶和托盤對中移動的過程中,還能夠借助頂部的橫移機構和旋轉機構對鋼桶進行提拉的同時進行位置和方位的調節,從而使鋼桶能夠同步動作,鋼桶與托盤之間僅有微小的摩擦力甚至無摩擦力作用,避免鋼桶產生傾斜或側翻,也避免了鋼桶底部與托盤表面摩擦阻礙對中調節,不會導致托盤表面摩擦受損。
- 還沒有人留言評論。精彩留言會獲得點贊!