一種無人機抓捕方法、抓捕裝置及其控制系統與流程
本發明屬于無人機抓捕,具體屬于一種無人機抓捕方法、抓捕裝置及其控制系統。
背景技術:
1、隨著無人機技術的快速發展,無人機應用于人們生活的各個領域,給人們帶來方便的同時也帶來了煩惱。有時出現在禁止無人機飛行的區域或者場所,如無人機在不恰當時刻在飛機場的上空出現,造成航班延誤、飛機不能起飛或被迫降落等情況;如在重要會議進行中,無人機飛到該會議場所,并進行錄音或者攝像等操作,進而會導致會議內容和重要的參會人員信息泄露,造成嚴重的信息泄露,以及無人機在一些秘密場地的上空飛行,獲取該秘密場地的區域位置以及場地的作業信息,造成機密的泄露;進而由于無人機帶來的種種不便,故而在一些場地外,都會配備無人機抓捕設備進行,對入侵特定區域的無人機進行抓捕。無人機抓捕設備包括外部目標探測設備、無人機和網槍,即通過在外部目標探測設備的目標指示引導下,無人機攜帶網槍自動接近和跟蹤目標,通過無人機在與目標無人機交匯時,通過網槍對目標無人機發射網彈,拋射飛網,即折疊放置在網倉內的柔性繩網在牽引體慣性作用下拉伸展開,與目標接觸碰撞,當柔性繩網展開到最大極限時,由于自身彈性牽引體開始反彈導致柔性網收縮,并在牽引體的甩動纏繞下完成對目標的捕捉。抓捕后,使用柔性繩網上系留繩將目標無人機帶回。
2、目前,無人機上攜帶的網槍,通過在無人機上搭載網槍、光電吊艙以及控制器來實現空中遠程發射抓捕網,能夠對目標實施抓捕,但由于該網槍是由手持抓捕網發射器改進而來,即采用制式手槍發射結構,內部結構包含扳機、擊錘、擊針等組成機械撞擊發火機構。其在使用過程中,通過擊發火藥后產生高壓氣體將抓捕網發射出去,進而發射過程中會產生很大的后坐力,會使得精密儀器較多的無人機及光電吊艙損壞,甚至會導致無人機失去平衡而墜毀,導致無人機抓捕的失敗率高;同時,機械撞擊發火機構需要外力擊發,外力擊發需要在結構上安裝舵機來實現,這種結構會使無人機整體重量大大增加,進而影響無人機飛行姿態,影響無人機的抓捕。
技術實現思路
1、現有無人機上攜帶的網槍是通過機械撞擊發火機構將抓捕網發射出去,會產生很大的后坐力,導致無人機抓捕的失敗率高。為了解決這個問題,本發明提供了一種無人機抓捕方法、抓捕裝置及其控制系統。
2、為實現上述目的,本發明提供如下技術方案:
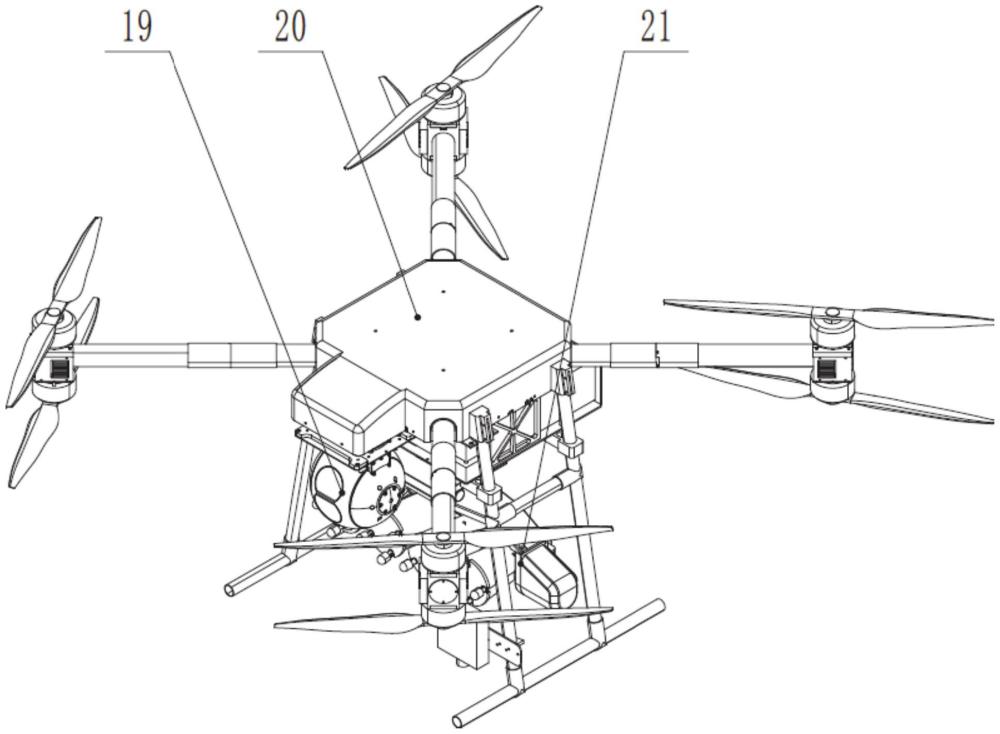
3、本發明公開了一種無人機抓捕裝置,包括無人機,所述無人機上安裝有捕網裝置和目標獲取件;
4、所述捕網裝置包括掛架板,所述掛架板上對稱連接有安裝臂,所述安裝臂上安裝有角度調節組件,所述角度調節組件上安裝有網槍;
5、所述網槍包括發射管,所述發射管安裝于所述角度調節組件上,所述發射管內安裝有抓捕網,所述抓捕網上連接有牽引頭,所述牽引頭安裝在所述發射管上;
6、所述發射管上連接有氣體發生器,所述氣體發生器內安裝有發射藥,所述氣體發生器連接所述牽引頭,所述氣體發生器上連接有擊發器,所述擊發器內安裝有電底火,所述電底火用于點燃所述發射藥。
7、優選地,所述角度調節組件包括俯仰軸,所述俯仰軸安裝在所述安裝臂上,所述俯仰軸上連接有聯軸器,所述聯軸器上連接有伺服驅動件,所述俯仰軸上位于所述掛架板內安裝有支架,所述支架上安裝所述發射管。
8、優選地,所述牽引頭上設置有抓捕網重錘。
9、優選地,所述抓捕網的面積為3.5x3.5m。
10、優選地,所述掛架板上連接有快拆安裝件,所述包括連接架,所述連接架固定在掛架板上,所述連接架上設置有卡槽,所述卡槽內安裝有卡臺,所述卡臺固定在所述無人機上,所述連接架上設置有限位柱,所述限位柱用于固定所述卡臺。
11、優選地,所述聯軸器為十字軸式萬向聯軸器。
12、優選地,所述伺服驅動件為俯仰伺服電機。
13、優選地,所述目標位置獲取件為光電吊艙。
14、本發明還公開了一種無人機抓捕控制系統,包括處理模塊、控制終端和傳輸模塊;
15、所述傳輸模塊通信連接有光電吊艙控制器、無人機控制器和俯仰伺服電機控制器;
16、所述處理模塊包括模型構建單元、仿真單元和修正單元,其中,所述模型構建單元通信連接所述仿真單元、所述無人機控制器和所述光電吊艙控制器;
17、所述仿真單元通信連接所述修正單元、所述無人機控制器和所述光電吊艙控制器;
18、所述修正單元通信連接所述仿真單元、所述無人機控制器、所述光電吊艙控制器、所述俯仰伺服電機控制器和所述傳輸模塊。
19、所述控制終端包括顯控單元和傳導單元,所述顯控單元通信連接所述傳導單元,所述傳導單元無線通信連接所述傳輸模塊。
20、本發明還公開了一種無人機抓捕方法,包括以下步驟:
21、步驟1,在無人機上安裝捕網裝置,控制無人機升空到指定的高度;
22、步驟2,基于無人機的雷達和光電吊艙獲取待抓捕目標的信息;
23、步驟3,基于待抓捕目標的信息規劃攜無人機的飛行路線、預抓捕位置和預抓捕時間;
24、步驟4,修正攜帶網槍的無人機的飛行路線、預抓捕位置和預抓捕時間,確定抓捕位置和抓捕時間,控制抓捕裝置對待抓捕無人機進行實施抓捕。
25、與現有技術相比,本發明具有以下有益的技術效果:
26、本發明公開了一種無人機抓捕裝置,本裝置中通過擊發器點燃氣體發生器內的發射藥,將發射管內抓捕網發出,進而取代扳機、擊錘等組成的機械擊發結構,減輕了整體結構的重量,降低整體結構的復雜性,降低發射抓捕網時的后坐力,減少無人機在發射抓捕網過程中的震動,使得無人機平穩地飛行,提高抓捕無人機的成功率。
27、進一步地,本裝置中通過角度調節組件中的伺服驅動件帶動俯仰軸轉動,進而使得支架能夠隨著俯仰軸轉動而轉動,進而實現捕網裝置角度的調節,使得使用者通過控制伺服驅動組件,即可輕松調節捕網裝置的發射角度,提高了操作便利性和裝置穩定性。
28、更進一步地,本裝置中抓捕網的面積設定為3.5x3.5m,保了抓捕網足夠的覆蓋范圍,能夠有效地包裹住目標,同時保持操作的靈活性和便捷性,提高了抓捕效率和成功率;同時,牽引頭上設置有抓捕網重錘,能夠增加抓捕網在空中的穩定性,使其在飛行過程中不易受到風等外界因素的干擾,確保抓捕的精準性。
29、更進一步地,本裝置中在掛架板上設置快拆安裝件,極大地提升了無人機與捕網裝置之間的連接便捷性和穩定性。通過連接架上的卡槽和卡臺與無人機固定連接,實現了快速安裝與拆卸的功能,簡化了安裝步驟,還提高了操作的靈活性。同時,連接架上的限位柱確保了卡臺的穩定固定,進一步增強了整個系統的安全性。在需要更換或維修捕網裝置時,這種快拆設計能夠大大節省時間,提高工作效率,還便于無人機攜帶多種捕網裝置,以適應不同的任務需求,提升了無人機的多任務執行能力。
30、更進一步地,本裝置中聯軸器為十字軸式萬向聯軸器,十字軸式萬向聯軸器可以有效緩沖俯仰伺服電機的機械沖擊,保證俯仰伺服電機穩定地工作;伺服驅動件為俯仰伺服電機,伺服電機能夠實現微小且準確的位置調整,進而能夠精準地將網搶對準抓捕目標,伺服電機響應速度快,可以在短時間內實現高速運動,確保無人機抓捕裝置能夠迅速調整角度,快速捕捉目標,目標位置獲取件為光電吊艙,通過光電吊艙能夠快速、準確地獲取目標位置,提高無人機抓捕或作戰的效率和成功率。
31、本發明還公開了一種無人機抓捕控制系統,該系統通過集成處理模塊、控制終端和傳輸模塊,形成了一套高效、智能的控制系統。該系統不僅實現了對光電吊艙、無人機和俯仰伺服電機的精確控制,還通過處理模塊的模型構建、仿真和修正功能,進一步提升了系統的智能化水平和抓捕效率。
32、本發明還公開了一種無人機抓捕方法,該方法中通過獲取待抓捕目標的信息,通過在無人機上安裝捕網裝置,實現了無人機對另一無人機的有效抓捕,提高了空中作業的靈活性和效率。其次,利用無人機的雷達和光電吊艙精確獲取待抓捕目標的信息,確保了抓捕過程的精確性和安全性。此外,基于獲取的信息規劃飛行路線、預抓捕位置和預抓捕時間,提高了抓捕的準確性和成功率。最后,通過修正飛行路線、預抓捕位置和預抓捕時間,進一步確保了抓捕的精準性和實時性。
- 還沒有人留言評論。精彩留言會獲得點贊!