車輛的轉向控制方法和車輛與流程
本技術涉及車輛,并且更具體地,涉及車輛中一種車輛的轉向控制方法和車輛。
背景技術:
1、隨著車輛技術的發展,越來越多的車輛配置了后輪轉向系統,通過后輪轉向系統能夠控制車輛的后輪進行轉向,從而提高車輛的轉向性能。
2、相關技術中,后前輪轉向比例通常是預先配置好的,后輪轉向系統的能力沒有被充分利用,后輪轉向功能與車輛的適配性較差。
3、因此,如何提高后輪轉向功能與車輛的適配性是研究的熱點。
技術實現思路
1、本技術實施例提供了一種車輛的轉向控制方法和車輛,能夠提高后輪轉向功能與車輛的適配性,技術方案如下:
2、一方面,提供了一種車輛的轉向控制方法,所述方法包括:
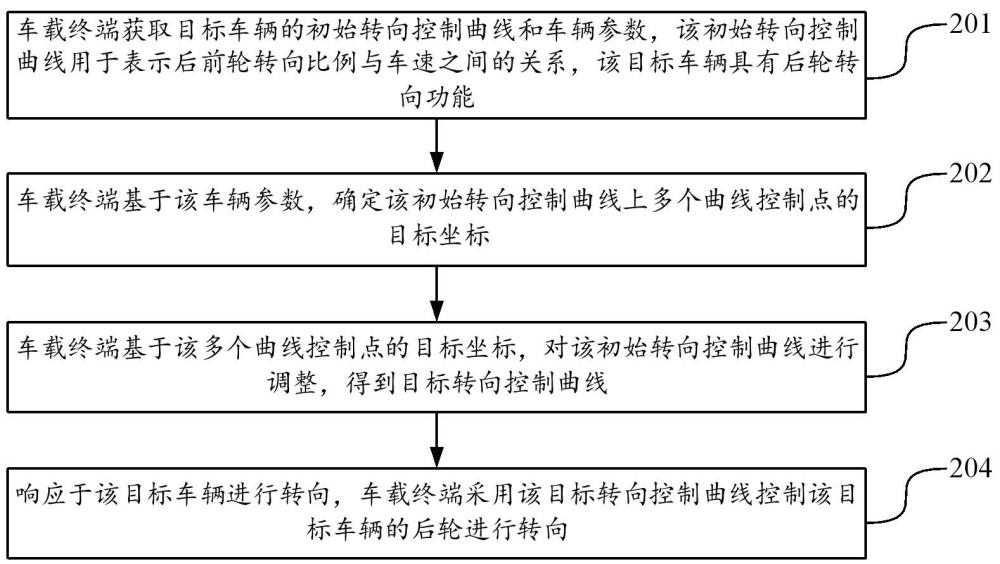
3、獲取目標車輛的初始轉向控制曲線和車輛參數,所述初始轉向控制曲線用于表示后前輪轉向比例與車速之間的關系,所述目標車輛具有后輪轉向功能;
4、基于所述車輛參數,確定所述初始轉向控制曲線上多個曲線控制點的目標坐標;
5、基于所述多個曲線控制點的目標坐標,對所述初始轉向控制曲線進行調整,得到目標轉向控制曲線;
6、響應于所述目標車輛進行轉向,采用所述目標轉向控制曲線控制所述目標車輛的后輪進行轉向。
7、在一種可能的實施方式中,所述多個曲線控制點包括第一曲線控制點、第二曲線控制點、第三曲線控制點、第四曲線控制點以及第五曲線控制點,所述第一曲線控制點、所述第二曲線控制點、所述第三曲線控制點、所述第四曲線控制點以及所述第五曲線控制點分別對應的車速依次增大,所述基于所述車輛參數,確定所述初始轉向控制曲線上多個曲線控制點的目標坐標,包括:
8、基于所述車輛參數,確定所述第一曲線控制點的目標坐標、第二曲線控制點的目標坐標、第三曲線控制點的目標坐標、第四曲線控制點的目標坐標以及第五曲線控制點的目標坐標;
9、其中,所述第一曲線控制點為轉向控制曲線的最低點,所述第二曲線控制點為轉向控制曲線中零車速對應的點,所述第三曲線控制點為轉向控制曲線的平臺起點,所述第四曲線控制點為轉向控制曲線的平臺終點,所述第五曲線控制點為轉向控制曲線的最高點,所述平臺為轉向控制曲線中后前輪轉向比例保持不變的位置。
10、在一種可能的實施方式中,所述車輛參數包括車輛屬性、車輛駕駛參數、車輛橫擺參數以及橫擺評價參數,所述基于所述車輛參數,確定所述第一曲線控制點的目標坐標、第二曲線控制點的目標坐標、第三曲線控制點的目標坐標、第四曲線控制點的目標坐標以及第五曲線控制點的目標坐標,包括:
11、基于所述車輛屬性以及所述橫擺評價參數,確定所述第一曲線控制點的目標坐標,所述橫擺評價參數用于表示目標對象對所述目標車輛在不同車速的橫擺情況的評價,所述目標對象為所述目標車輛的駕駛員或測試人員;
12、基于所述車輛橫擺參數以及所述車輛駕駛參數,確定所述第二曲線控制點的目標坐標,所述車輛橫擺參數用于表示所述目標車輛在不同車速的橫擺情況;
13、基于所述車輛屬性和車輛橫擺參數,確定所述第三曲線控制點的目標坐標以及所述第四曲線控制點的目標坐標;
14、基于所述車輛屬性,確定所述第五曲線控制點的目標坐標。
15、在一種可能的實施方式中,所述車輛屬性包括后輪轉向范圍以及需求最小轉彎半徑,所述基于所述車輛屬性以及所述橫擺評價參數,確定所述第一曲線控制點的目標坐標,包括:
16、確定所述后輪轉向范圍指示的最小后輪轉向角度;
17、將所述最小后輪轉向角度、所述需求最小轉彎半徑以及所述橫擺評價參數代入第一關系數據,得到所述第一曲線控制點的目標坐標;
18、或者,采用所述最小后輪轉向角度、所述需求最小轉彎半徑以及所述橫擺評價參數在第一關系表中進行查詢,得到所述第一曲線控制點的目標坐標。
19、在一種可能的實施方式中,所述車輛駕駛參數包括車輛駕駛模式,所述基于所述車輛橫擺參數以及所述車輛駕駛參數,確定所述第二曲線控制點的目標坐標,包括:
20、采用所述車輛橫擺參數和所述車輛駕駛模式在第二關系表中進行查詢,得到所述第二曲線控制點的目標坐標。
21、在一種可能的實施方式中,所述車輛屬性包括中等車速的車速區間,所述基于所述車輛屬性和車輛橫擺參數,確定所述第三曲線控制點的目標坐標以及所述第四曲線控制點的目標坐標,包括:
22、基于所述中等車速的車速區間的最低車速、最高車速以及所述車輛橫擺參數,確定所述第三曲線控制點的目標坐標和所述第四曲線控制點的目標坐標。
23、在一種可能的實施方式中,所述車輛屬性包括后輪轉向范圍,所述基于所述車輛屬性,確定所述第五曲線控制點的目標坐標,包括:
24、確定所述后輪轉向范圍指示的最大后輪轉向角度;
25、基于所述最大后輪轉向角度,確定所述第五曲線控制點的目標坐標。
26、在一種可能的實施方式中,所述基于所述多個曲線控制點的目標坐標,對所述初始轉向控制曲線進行調整,得到目標轉向控制曲線,包括:
27、采用所述多個曲線控制點的目標坐標來更新所述初始轉向控制曲線中對應曲線控制點的坐標,得到參考轉向控制曲線;
28、對所述參考轉向控制曲線進行平滑處理,得到所述目標轉向控制曲線。
29、在一種可能的實施方式中,所述對所述參考轉向控制曲線進行平滑處理,得到所述目標轉向控制曲線,包括:
30、采用所述多個曲線控制點將所述參考轉向控制曲線分為多個曲線段;
31、采用各個所述曲線段對應的曲線平滑方式對各個所述曲線段進行平滑處理,得到各個所述曲線段對應的參考曲線段;
32、拼接多個參考曲線段,得到所述目標轉向控制曲線。
33、在一種可能的實施方式中,所述采用各個所述曲線段對應的曲線變化梯度對各個所述曲線段進行平滑處理,得到各個所述曲線段對應的參考曲線段,包括:
34、對于所述多個曲線段中的目標曲線段,基于所述目標車輛的加速度和方向盤轉角變化率,確定所述目標曲線段的曲線變化梯度;
35、采用所述曲線變化梯度對所述目標曲線段進行平滑處理,得到所述目標曲線段對應的參考曲線段;
36、對于所述多個曲線段中的除所述目標曲線段之外的多個其他曲線段,采用所述多個其他曲線段分別對應的曲線平滑方式對各個所述其他曲線段進行平滑處理,得到各個所述其他曲線段對應的參考曲線段。
37、在一種可能的實施方式中,所述響應于所述目標車輛進行轉向,采用所述目標轉向控制曲線控制所述目標車輛的后輪進行轉向,包括:
38、響應于所述目標車輛進行轉向,確定所述目標車輛的前輪的第一轉向角度;
39、基于所述目標車輛的當前車速、所述第一轉向角度以及所述目標轉向控制曲線,確定所述目標車輛的后輪的第二轉向角度;
40、控制所述目標車輛的后輪以所述第二轉向角度進行轉向。
41、一方面,提供了一種車輛的轉向控制裝置,所述裝置包括:
42、獲取模塊,用于獲取目標車輛的初始轉向控制曲線和車輛參數,所述初始轉向控制曲線用于表示后前輪轉向比例與車速之間的關系,所述目標車輛具有后輪轉向功能;
43、目標坐標確定模塊,用于基于所述車輛參數,確定所述初始轉向控制曲線上多個曲線控制點的目標坐標;
44、曲線調整模塊,用于基于所述多個曲線控制點的目標坐標,對所述初始轉向控制曲線進行調整,得到目標轉向控制曲線;
45、轉向控制模塊,用于響應于所述目標車輛進行轉向,采用所述目標轉向控制曲線控制所述目標車輛的后輪進行轉向。
46、在一種可能的實施方式中,所述多個曲線控制點包括第一曲線控制點、第二曲線控制點、第三曲線控制點、第四曲線控制點以及第五曲線控制點,所述第一曲線控制點、所述第二曲線控制點、所述第三曲線控制點、所述第四曲線控制點以及所述第五曲線控制點分別對應的車速依次增大,所述目標坐標確定模塊,用于基于所述車輛參數,確定所述第一曲線控制點的目標坐標、第二曲線控制點的目標坐標、第三曲線控制點的目標坐標、第四曲線控制點的目標坐標以及第五曲線控制點的目標坐標;其中,所述第一曲線控制點為轉向控制曲線的最低點,所述第二曲線控制點為轉向控制曲線中零車速對應的點,所述第三曲線控制點為轉向控制曲線的平臺起點,所述第四曲線控制點為轉向控制曲線的平臺終點,所述第五曲線控制點為轉向控制曲線的最高點,所述平臺為轉向控制曲線中后前輪轉向比例保持不變的位置。
47、在一種可能的實施方式中,所述車輛參數包括車輛屬性、車輛駕駛參數、車輛橫擺參數以及橫擺評價參數,所述目標坐標確定模塊,用于基于所述車輛屬性以及所述橫擺評價參數,確定所述第一曲線控制點的目標坐標,所述橫擺評價參數用于表示目標對象對所述目標車輛在不同車速的橫擺情況的評價,所述目標對象為所述目標車輛的駕駛員或測試人員;基于所述車輛橫擺參數以及所述車輛駕駛參數,確定所述第二曲線控制點的目標坐標,所述車輛橫擺參數用于表示所述目標車輛在不同車速的橫擺情況;基于所述車輛屬性和車輛橫擺參數,確定所述第三曲線控制點的目標坐標以及所述第四曲線控制點的目標坐標;基于所述車輛屬性,確定所述第五曲線控制點的目標坐標。
48、在一種可能的實施方式中,所述車輛屬性包括后輪轉向范圍以及需求最小轉彎半徑,所述目標坐標確定模塊,用于確定所述后輪轉向范圍指示的最小后輪轉向角度;將所述最小后輪轉向角度、所述需求最小轉彎半徑以及所述橫擺評價參數代入第一關系數據,得到所述第一曲線控制點的目標坐標;或者,采用所述最小后輪轉向角度、所述需求最小轉彎半徑以及所述橫擺評價參數在第一關系表中進行查詢,得到所述第一曲線控制點的目標坐標。
49、在一種可能的實施方式中,所述目標坐標確定模塊,用于采用所述車輛橫擺參數和所述車輛駕駛模式在第二關系表中進行查詢,得到所述第二曲線控制點的目標坐標。
50、在一種可能的實施方式中,所述車輛屬性包括中等車速的車速區間,所述目標坐標確定模塊,用于基于所述中等車速的車速區間的最低車速、最高車速以及所述車輛橫擺參數,確定所述第三曲線控制點的目標坐標和所述第四曲線控制點的目標坐標。
51、在一種可能的實施方式中,所述車輛屬性包括后輪轉向范圍,所述目標坐標確定模塊,用于確定所述后輪轉向范圍指示的最大后輪轉向角度;基于所述最大后輪轉向角度,確定所述第五曲線控制點的目標坐標。
52、在一種可能的實施方式中,所述曲線調整模塊,用于采用所述多個曲線控制點的目標坐標來更新所述初始轉向控制曲線中對應曲線控制點的坐標,得到參考轉向控制曲線;對所述參考轉向控制曲線進行平滑處理,得到所述目標轉向控制曲線。
53、在一種可能的實施方式中,所述曲線調整模塊,用于采用所述多個曲線控制點將所述參考轉向控制曲線分為多個曲線段;采用各個所述曲線段對應的曲線平滑方式對各個所述曲線段進行平滑處理,得到各個所述曲線段對應的參考曲線段;拼接多個參考曲線段,得到所述目標轉向控制曲線。
54、在一種可能的實施方式中,所述曲線調整模塊,用于對于所述多個曲線段中的目標曲線段,基于所述目標車輛的加速度和方向盤轉角變化率,確定所述目標曲線段的曲線變化梯度;采用所述曲線變化梯度對所述目標曲線段進行平滑處理,得到所述目標曲線段對應的參考曲線段;對于所述多個曲線段中的除所述目標曲線段之外的多個其他曲線段,采用所述多個其他曲線段分別對應的曲線平滑方式對各個所述其他曲線段進行平滑處理,得到各個所述其他曲線段對應的參考曲線段。
55、在一種可能的實施方式中,所述轉向控制模塊,用于響應于所述目標車輛進行轉向,確定所述目標車輛的前輪的第一轉向角度;基于所述目標車輛的當前車速、所述第一轉向角度以及所述目標轉向控制曲線,確定所述目標車輛的后輪的第二轉向角度;控制所述目標車輛的后輪以所述第二轉向角度進行轉向。
56、一方面,提供了一種車輛,所述車輛包括一個或多個處理器和一個或多個存儲器,所述一個或多個存儲器中存儲有至少一條程序代碼,所述程序代碼由所述一個或多個處理器加載并執行以實現所述車輛的轉向控制方法所執行的操作。
57、一方面,提供了一種計算機可讀存儲介質,所述計算機可讀存儲介質中存儲有至少一條程序代碼,所述程序代碼由處理器加載并執行以實現所述車輛的轉向控制方法所執行的操作。
58、采用本技術實施例提供的技術方案,獲取目標車輛的初始轉向控制曲線和車輛參數,該初始轉向控制曲線用于表示后前輪轉向比例與車速之間的關系,也即是通過該初始轉向控制曲線能夠找到不同車速對應的后前輪轉向比例,該初始轉向控制曲線為該目標車輛的默認轉向控制曲線。基于該車輛參數,確定該初始轉向控制曲線上多個曲線控制點的目標坐標,曲線控制點用于改變初始轉向控制曲線的形狀,從而改變初始轉向控制曲線表示的后前輪轉向比例與車速之間的對應關系。基于多個曲線控制點的目標坐標,對該初始轉向控制曲線進行調整,得到目標轉向控制曲線,該目標轉向控制曲線為與車輛參數適配性較好的轉向控制曲線。響應于該目標車輛進行轉向,采用該目標轉向控制曲線來控制該目標車輛的后輪進行轉向,從而實現對后輪轉向功能的充分利用。
- 還沒有人留言評論。精彩留言會獲得點贊!