一種基于多連桿跳躍機構的高仿生青蛙及其控制方法
本發明涉及仿生機器人領域,尤其涉及一種基于多連桿跳躍機構的高仿生青蛙及其控制方法。
背景技術:
1、青蛙具有優秀的跳躍爆發力和越障能力,屬于間歇性跳躍,能夠一次跳躍超過自身長度十余倍的距離。青蛙身體各部分發育不平衡,后肢粗大而前肢短小,起跳時強大的后肢肌肉像彈簧一樣迅速將身體彈起,落地時前肢緩沖平穩著陸。
2、研究青蛙后腿結構和其起跳過程腿部運動有助于機器人系統設計,結合仿生學與機械設計理論共同構建仿蛙機器人模型,不僅有利于機器人跳躍能力的提高,而且有利于生物跳躍機理的揭示。
技術實現思路
1、本發明提供一種基于多連桿跳躍機構的高仿生青蛙及其控制方法,旨在至少解決現有技術中存在的技術問題之一。
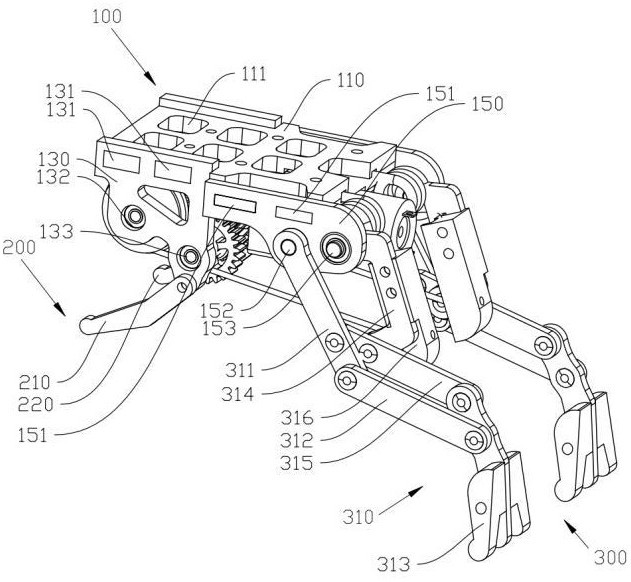
2、本發明的技術方案為一種基于多連桿跳躍機構的高仿生青蛙,包括:
3、軀干部,所述軀干部包括軀干主板、夾板、左側絞盤板、右側絞盤板、左側腿根板和右側腿根板,所述左側絞盤板、所述右側絞盤板、所述左側腿根板和所述右側腿根板分別與所述軀干主板連接,所述夾板設置在所述軀干主板后側的下方;
4、前肢部,所述前肢部包括左側前肢板和右側前肢板,所述左側前肢板的一端與所述左側絞盤板的底端通過螺栓連接,所述右側前肢板的一端與所述右側絞盤板的底端通過螺栓連接;
5、后肢部,所述后肢部包括左側后肢子部和右側后肢子部,所述左側后肢子部和所述右側后肢子部分別與所述軀干部連接;
6、蓄力機構,所述蓄力機構安裝在所述軀干部內,所述蓄力機構用于驅動所述前肢部和所述后肢部運動。
7、進一步,所述軀干主板上設置有至少一個用于減少重量的鏤空槽;
8、所述軀干主板的前端左側設置有用于與所述左側絞盤板連接的第一凸塊,所述左側絞盤板上設置有用于安裝所述第一凸塊的第一安裝孔,所述軀干主板的前端右側設置有用于與所述右側絞盤板連接的第二凸塊,所述右側絞盤板上設置有用于安裝所述第二凸塊的第二安裝孔。
9、進一步,所述夾板左側設置有用于與所述左側腿根板連接的第三凸塊,所述左側腿根板上設置有用于安裝所述第三凸塊的第三安裝孔,所述夾板右側設置有用于與所述右側腿根板連接的第四凸塊,所述右側腿根板上設置有用于安裝所述第四凸塊的第四安裝孔。
10、進一步,所述左側腿根板上設置有用于安裝所述左側第一大腿的第五通孔和用于安裝所述左側第二大腿的第六通孔;
11、所述左側后肢子部包括依次連接的左側第一大腿、左側第一小腿和左側腳趾,還包括左側第二大腿、左側第二小腿和左側大腿連接件,所述左側第一大腿的一端與所述第五通孔連接,所述左側第二大腿的一端與所述第六通孔連接,所述左側第二大腿的另一端與所述左側第二小腿的一端連接,所述左側第二小腿的另一端與所述左側腳趾連接,所述左側大腿連接件與所述左側第二大腿固定。
12、進一步,所述右側腿根板上設置有用于安裝所述右側第一大腿的第七通孔和用于安裝所述右側第二大腿的第八通孔;
13、所述右側后肢子部包括依次連接的右側第一大腿、右側第一小腿和右側腳趾,還包括右側第二大腿、右側第二小腿和右側大腿連接件,所述右側第一大腿的一端與所述第七通孔連接,所述右側第二大腿的一端與所述第八通孔連接,所述右側第二大腿的另一端與所述右側第二小腿的一端連接,所述右側第二小腿的另一端與所述右側腳趾連接,所述右側大腿連接件與所述右側第二大腿固定。
14、進一步,所述蓄力機構包括減速電機、電機減速箱、電機固定件、蝸桿、渦輪、蝸桿約束件、不完全齒輪、不完全齒輪軸、從動齒輪、左側絞盤、右側絞盤和從動齒輪軸;
15、所述減速電機通過所述電機減速箱安裝在所述電機固定件上,所述電機固定件的頂部和所述夾板的頂部依次通過螺栓與所述軀干主板的底部連接,所述蝸桿安裝在所述減速電機的輸出軸上,所述蝸桿約束件安裝在所述蝸桿的末端,所述蝸桿約束件的頂部通過螺栓與所述軀干主板的底部連接,所述渦輪與所述蝸桿嚙合且所述渦輪安裝在所述不完全齒輪軸上,所述不完全齒輪軸上安裝有不完全齒輪,所述從動齒輪與所述不完全齒輪嚙合,所述從動齒輪、所述左側絞盤和所述右側絞盤分別安裝在所述從動齒輪軸上。
16、進一步,所述左側絞盤板上設置有第一通孔和第二通孔,所述右側絞盤板上設置有與所述第一通孔設置位置相對應的第三通孔和與所述第二通孔設置位置相對應的第四通孔。
17、進一步,所述左側絞盤靠近所述第一通孔設置,所述右側絞盤靠近所述第三通孔設置,所述從動齒輪軸安裝在左側絞盤板的第一通孔和右側絞盤板的第三通孔之間,所述不完全齒輪軸安裝在左側絞盤板的第二通孔和右側絞盤板的第四通孔之間。
18、進一步,所述蓄力機構還包括雙扭簧、左側拉繩和右側拉繩;
19、所述雙扭簧的中部安裝在所述軀干主板和所述夾板之間,所述軀干主板的底部設置有用于安裝所述雙扭簧中部的上弧形槽,所述夾板的頂部設置有用于安裝所述雙扭簧中部的下弧形槽,所述上弧形槽和所述下弧形槽的深度均為所述雙扭簧線徑的一半,所述雙扭簧的兩端分別安裝在所述左側大腿連接件和所述右側大腿連接件的內側;
20、所述左側拉繩的一端與所述左側絞盤連接,所述左側拉繩的另一端與所述左側大腿連接件固定,所述右側拉繩的一端與所述右側絞盤連接,所述右側拉繩的另一端與所述右側大腿連接件固定。
21、進一步,本發明還公開一種基于多連桿跳躍機構的高仿生青蛙的控制方法,應用在所述的基于多連桿跳躍機構的高仿生青蛙上,所述的控制方法包括以下步驟:
22、s100、在蓄能階段,減速電機通過電機減速箱帶動蝸桿轉動,渦輪隨著蝸桿的轉動而轉動,從而不完全齒輪軸上的不完全齒輪轉動,與不完全齒輪嚙合的從動齒輪轉動,帶動從動齒輪軸轉動,從而使得設置在從動齒輪軸兩端的左側絞盤和右側絞盤轉動;
23、s200、左側絞盤旋轉拉動左側拉繩,右側絞盤旋轉拉動右側拉繩,使后肢部蜷縮,壓縮雙扭簧直到蓄能壓縮完成;
24、s300、在釋放階段,雙扭簧的彈性勢能轉化為機器人的動能,不完全齒輪脫離嚙合狀態,左側拉繩和右側拉繩失去約束;
25、s400、雙扭簧的兩臂夾角在短時間內迅速增大,擠壓左側大腿連接件和右側大腿連接件,后肢部迅速展開,作出向下和向后蹬地的動作,基于多連桿跳躍機構的高仿生青蛙迅速離地,實現向前和向上運動。
26、本發明的有益效果是:
27、所述的基于多連桿跳躍機構的高仿生青蛙采用碳纖維板作為主體材料,有利于在減重的同時保證結構強度。軀干主板設計凸起,左側絞盤板、右側絞盤板、左側腿根板和右側腿根板挖槽,采用榫接緊配方式,節省螺栓重量。采用蝸輪蝸桿傳動,不僅有利于增大轉矩,而且能將縱向轉矩轉化為橫向轉矩,使較長的減速電機可以縱向安裝,增強了結構的緊湊性與對稱性。采用繩驅方式實現后肢部的收縮,實現了由左側絞盤和右側絞盤的曲線運動轉化為拉繩的直線運動,再轉化為后肢部的曲線運動,通過調整左側絞盤和右側絞盤與大腿連接件的相對位置,使蓄力初期拉繩與大腿的夾角成銳角,蓄力末期與大腿夾角成直角或近似直角,使阻力力矩與繩驅動力力矩成正相關關系,機構簡單,傳動效率高,故障率低。本方案采用不完全齒輪搭配從動齒輪作為儲能-釋放機構的核心部件,不完全齒輪持續旋轉,實現與從動齒輪的周期性嚙合與脫離嚙合,從而在僅有一個電機單向旋轉的前提下實現自動儲能與自動釋放。通過改變不完全齒輪、從動齒輪的齒數或絞盤的直徑可調整最終輸出的力矩與蓄力時間。
- 還沒有人留言評論。精彩留言會獲得點贊!