用于一個騎乘者的具有在地面上滾動的球的車輛的制作方法
本發明涉及一種用于使騎乘者移動的車輛,所述車輛具有在地面上滾動的球,具有不穩定地支承在球上的騎乘者在車輛的運行期間以平衡的方式站在其上的承載元件,具有支承在承載元件上并驅動球的驅動裝置以及具有控制器,借助于控制器能夠根據承載元件的傾斜度和承載元件的傾斜方向將驅動裝置控制在期望的行進方向上。
背景技術:
1、從歐洲專利ep3043877b1已知一種用于使騎乘者移動的車輛,特別是滑板型球形腳輪。車輛主要由在地面上滾動的球、支承在球上并具有兩個站立表面的承載元件、驅動裝置和控制器組成,其中每一個站立表面用于騎乘者的一只腳。在一個實施例中,驅動裝置基本上由總共四個全向輪構成,其中三個全向輪組合成一組并在球的上半部滾動,而其中第四個全向輪沿球的中維線滾動。所有全向輪在每種情況下都在球的表面上沒有傾斜角地站立,使得當承載元件水平定向時,該組的三個全向輪的相應旋轉軸線是水平的,并且第四全向輪的旋轉軸線是垂直定向的。承載元件主要經由三個全向輪的組支承在球上。借助于第四個全向輪,承載元件能夠圍繞球的垂直軸線旋轉。因此,球能夠在位于球的中維線處的承載元件下方或承載元件中的地面上在所有方向上滾動。除了支承功能之外,所有全向輪還承擔驅動功能。為此,各個全向輪每一個經由電動馬達和安裝在承載元件上的前置變速器驅動。為了使用也可以被稱為運動裝置、休閑裝置或娛樂裝置的車輛,騎乘者以自由平衡的方式站在承載元件上,并且通過轉移他的重量來控制、制動和操縱車輛。其中,騎乘者由控制器輔助,該控制器尤其包括平衡控制模塊,該平衡控制模塊輔助騎乘者將承載元件平衡處于水平位置。車輛的運動方向以及因此球的滾動方向經由承載元件的傾斜來控制,承載元件的傾斜由騎乘者的重量的轉移引起。在控制器中處理承載元件的測量的加速度數據和角數據,基于此確定各個全向輪的哪個馬達將被驅動,并且以所需的旋轉方向和旋轉速度實現期望的行進運動和平衡位置。車輛配備有用于馬達和控制器的三個可再充電電池,這些電池圍繞球設置在承載元件的下側上。
2、另一歐洲專利ep3378540b1公開了一種類似的車輛,其具有球、承載元件和一組三個從動全向輪。這三個全向輪也在球的上半部上滾動,并且它們的旋轉軸線定向在不同方向。此外,車輛在承載元件上包括居中放置的把手,騎乘者能夠握住該把手。此外,在把手的上端上布置有控制機構,控制機構設計為操縱桿、操縱桿或搖臂開關,通過控制機構能夠設定所謂的車輛前進方向。利用控制機構,車輛的前進方向能夠以這樣的方式設定,即該方向對應于期望的行進方向,因此騎乘者在不轉頭的情況下沿行進方向看。
3、從荷蘭專利nl?1033676c2中已知一種用于個人運輸的所謂動態平衡球形踏板車,其借助于充滿壓縮空氣的球使騎乘者的移動成為可能。這個球形踏板車還包括具有用于騎乘者的轉向把手的保持桿。騎乘者站在設置在球上的承載元件上。球由總共三對全向輪驅動,每對全向輪以折疊角折疊抵靠球的表面。兩對在球的上半部滾動,第三對以相反的方式在球的下半部滾動。
4、韓國專利kr?10-1269628b1公開了另一種用于個人運輸的便攜式球形踏板車,其具有支承在形成為板的承載元件上的球和具有轉向把手的保持桿。承載元件包括居中設置的開口,球的上半部只有一小部分通過開口向上突出。球經由四個驅動馬達驅動,所述驅動馬達裝配有上游變速器和驅動輥,所述驅動輥各自支承在承載元件上。驅動輥被設置成抵靠球的表面而沒有傾斜角,具有垂直滾動方向并且在中維線處。如在球的圓周方向上所見,分別相鄰的驅動輥彼此均勻地間隔開。當承載元件水平定向時,驅動輥的旋轉軸線均水平定向。此外,每個驅動輪配置有輔助球,該輔助球經由相應的驅動輥從球向外偏移地布置,并且旨在防止球式踏板車傾翻。沒有描述承載元件借助于驅動馬達圍繞垂直軸線的旋轉運動的可能性。
5、從美國專利us8308604b2中已知全向輪關于行進機器人的球的驅動的類似裝置。四個全向輪在共同的高度處接合抵靠球的上半部,在每種情況下,沒有傾斜角并且具有水平旋轉軸線。如在球的圓周方向上所見,分別相鄰的全向輪彼此均勻地間隔開。
6、此外,從國際公開文獻wo2020110651a1中已知一種具有三個在地面上滾動的球的驅動裝置。三個球設置在一個假想三角形的角上,并由三個驅動輪驅動。在這種情況下,驅動輪分別與兩個相鄰的球接合。
7、此外,美國專利us10189342b2已經公開了一種在單個球上平衡的機器人。球通過三個分布在球的圓周上的驅動輪驅動。
技術實現思路
1、在此基礎上,本發明的目的是提供一種用于使騎乘者移動的改進的緊湊型車輛,車輛具有在地面上滾動的球,用于在所有方向上不受限制的可移動性。
2、這個目的通過具有權利要求1的特征的用于使騎乘者移動的具有在地面上滾動的球的車輛來實現。本發明的有利實施例在權利要求2至21中給出。
3、根據本發明,提供了一種用于使騎乘者移動的特別緊湊的車輛,其具有在地面上滾動的球,具有不穩定地支承在球上的騎乘者在車輛的運行期間以平衡的方式站立在其上的承載元件,,具有支承在承載元件上并且驅動球的驅動裝置,并且具有控制器,經由控制器,能夠根據承載元件的傾斜度和承載元件的傾斜方向將驅動裝置控制在期望的行進方向上,其中,驅動裝置包括四個全向輪,所述四個全向輪中的至少兩個全向輪具有不等于零的傾斜角。結合本發明,傾斜角被理解為是指依靠地面切向地立著或躺著的全向輪關于球的假想滾動方向向右或向左傾斜了傾斜角。因此,除了其在球的滾動方向上的驅動力之外,全向輪因此還可以將橫向驅動分量施加至球,橫向驅動分量可以用于承載元件圍繞球的垂直軸線在左和右方向上的旋轉并且可以用于圍繞垂直軸線在旋轉方向上的穩定。為了這個目的,四個全向輪中的至少兩個以共同旋轉的方式傾斜,以便能夠實現承載元件圍繞球的垂直軸線的兩個旋轉方向,而與球的相應滾動方向無關。由此直接得出,以共同旋轉的方式,從當承載元件是水平的時所看到的垂直的參考軸線開始,等同于正或負的傾斜角。在每種情況下,在球的中心的方向上考慮單個全向輪。因此,傾斜角也可以稱為轉向角。根據本發明的四個全向輪與傾斜角一起因此使得車輛能夠經由驅動裝置由以自由平衡的方式站立在承載元件上的騎乘者使用或不使用轉向桿在任何行進方向上移動,而無需使用保持桿,并且能夠圍繞其自身的垂直軸線旋轉成為可能。在此上下文中,“能夠在任何行進的方向上移動”應理解為是指行進的方向,例如車輛的向前行進方向,與騎乘者看著或面對的方向解耦,即,騎乘者還可以在相對于他面對的方向傾斜地在向前行進方向上行進。
4、車輛僅經由在承載元件上自由平衡的騎乘者的腳來控制。通過轉移他的重量,騎乘者發起車輛的運動。因此,控制器對承載元件的傾斜角的變化作出反應,并且經由驅動裝置驅動球在期望的方向上滾動。因此,控制器補償承載元件的測量的傾斜度,使得承載元件位于優選水平的定向。優選地,騎乘者在設有防滑覆層的站立表面區域中簡單地站立在承載元件上,使得騎乘者能夠穩固且安全地站立,并且用于更好地協調重量的轉移。
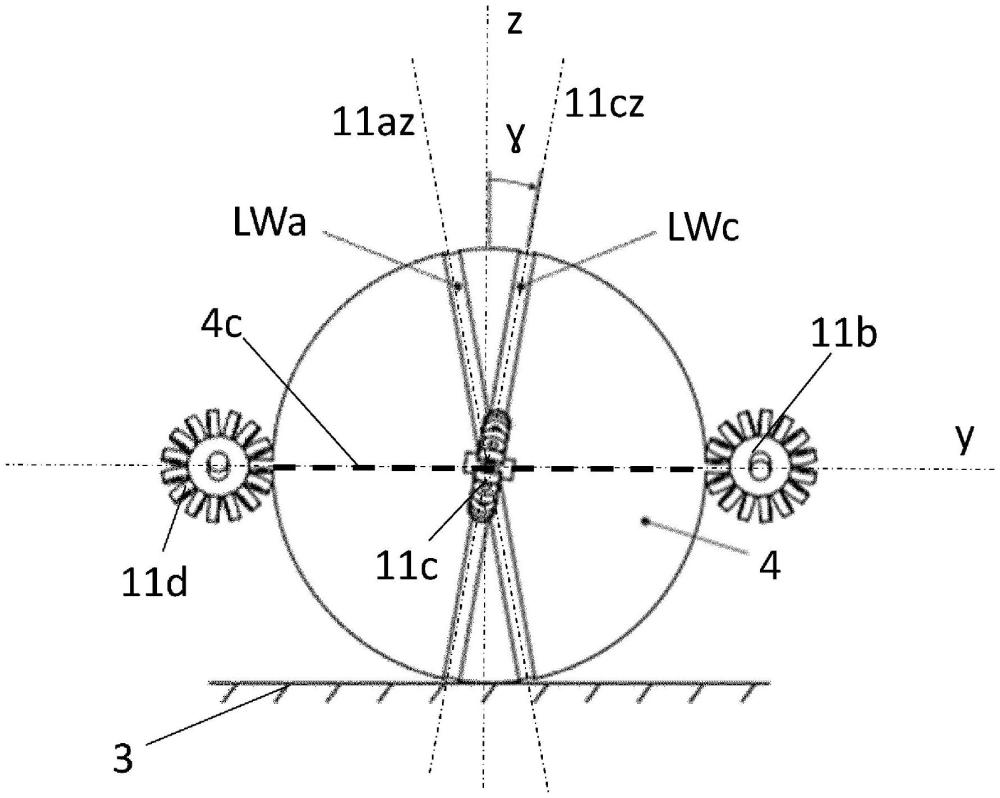
5、在特別有利的方式中,規定:相對于球的垂直軸線的傾斜角在-45度和+45度之間(排除0度,優選排除2至-2度),并且優選在-5度至-15度和+5度至+15度的范圍內(排除0度,優選排除2至-2度)。這樣,在實現了對于所有的行進運動都將驅動力良好地施加到球的表面的同時,實現了球圍繞垂直軸線的良好的可旋轉性水平。根據共向性的特征,至少兩個全向輪的傾斜角也具有相同的符號。
6、在特別有利的方式中,規定:兩個相對全向輪的傾斜角是共同旋轉的。這樣,實現了用于圍繞垂直軸線旋轉的驅動力的良好傳輸。
7、當所有全向輪傾斜了傾斜角并且相對的全向輪的傾斜角是共同旋轉的并且相鄰的全向輪的傾斜角是反向旋轉的時,實現了球圍繞垂直軸線的可靠可旋轉性。如在球的平面圖中所看到的,相對于經由球的中心點延伸的線位于相對側的全向輪被認為是相對的。
8、此外,或者規定,所有全向輪都傾斜了傾斜角,并且相鄰全向輪和相對全向輪的傾斜角是共同旋轉的。
9、在有利的方式中,車輛被設計成使得全向輪相對于球的縱向軸線折疊了折疊角,其中折疊角在-110度和+110度之間,優選地在0度和45度之間。由此,實現了車輛的特別緊湊結構。
10、全向輪相對于球的垂直軸線的最佳布置通過全向輪之間的間隔角在80和110度之間、優選地為90度來實現。這樣,驅動力能夠以特別令人滿意的方式引入到球中。在這種情況下,對于90度的間隔角,如果車輛在兩個全向輪之間的向前行進方向是45度并且以常規方式切割球的中心,則是特別有利的。
11、此外,規定在從球的中心點延伸直至通過相應全向輪的旋轉軸線的線與球的中維線之間的仰角在20和+65度之間,優選地在0度與45度之間,特別優選地為0度。仰角的調節影響車輛的行駛和傾斜行為。仰角越大,承載元件的傾斜角越大。在承載元件的更大傾斜角的情況下,更快地改變行進方向和速度是可能的。
12、結合上述傾斜角、折疊角和仰角以及與其相關的指示范圍,參考這樣的事實:盡管關于傾斜角、折疊角和仰角,這些每個優選地包括絕對相同的數值,但是它們也能夠彼此完全不同。
13、在特別有利的方式中規定,承載元件復制球的形狀,具有更大的直徑。承載元件的球形設計使得緊湊的結構成為可能。
14、在有利的方式中,承載元件被設計成使得其包括蓋部、兩個站立部和環部,蓋部覆蓋球的上部,球的下部向下突出離開環部。蓋部覆蓋球的上部,因此保護騎乘者在行進期間不與旋轉球接觸。站立部為騎乘者提供了足夠的站立表面,站立表面具有略微抬起的邊緣,確保了安全站立。環部用于穩定站立表面,并且還保護驅動裝置的部件免受灰塵響,并且保護騎乘者的腳免受與旋轉的全向輪的可能接觸。
15、從結構上講,特別有利的是,承載元件的站立部基本上設置在球的中維線處。這樣,實現了車輛關于困難的平均平衡能力。
16、為了通過球在騎乘者的腳之間的位置的車輛的良好平衡能力以及通過采用腳的預定位置的車輛的更快起動,規定:將騎乘者的站立表面設置在站立部上以及將具有站立表面的站立部以關于球相對的方式設置。
17、在特別有利的方式中,規定:驅動裝置附接至承載元件的環部并且四個全向輪每一個安裝在旋轉軸線上以將驅動力傳輸至球。
18、對于車輛的重量來說也有利的是,每個全向輪由電動馬達直接驅動而無需變速器的互連,并且每個電動馬達附接到承載元件的環部。
19、在一種優選的實施例中規定,電動馬達經由至少一個可再充電電池被供電并且電池圍繞球的圓周均勻分布地設置在承載元件的安裝空間中。由于均勻的重量心分布,電池圍繞球的圓周的布置不會損害車輛的行駛行為。
20、為了確定承載元件在空間中的位置,在承載元件上布置陀螺儀,利用陀螺儀能夠測量承載元件的傾斜程度和傾斜方向,并且將所測量的傾斜程度和傾斜方向傳輸到評估控制器。
21、在有利的方式中規定,控制器包括平衡控制模塊,該平衡控制模塊輔助騎乘者將承載元件平衡處于在空間中的水平位置。承載元件處于平衡定向的這種平衡經由第一至第四全向輪的相應致動來實現。輔助程度能夠變化并且能夠設定在使得騎乘者相對容易在承載元件上平衡的高水平。另一方面,輔助水平不是很大,以至于防止了騎乘者由于以加速器踏板的方式轉移其重量而引起的重量轉移而使車輛在傾斜方向上加速。
22、從結構上講,特別有利的是,四個傳感器設置在承載元件的站立表面上,這些傳感器記錄騎乘者的腳的腳趾或腳后跟的存在,并且將測量的重量變化傳輸到評估控制器。騎乘者的腳趾和腳后跟的抬起和降低使得控制車輛繞垂直軸線的旋轉成為可能。
23、通過承載元件經由支承裝置支承在球上,實現了車輛的沒有突然或意外運動的最佳行進行為,其中,支承裝置包括至少一個非從動全向輪。
24、在優選實施例中規定,車輛沒有關于騎乘者的把手。因此,騎乘者能夠以騎行滑板的方式在車輛的承載元件上自由平衡,而不用通過將他的手放在柱上或轉向桿上,或者坐在設置在承載元件上的車座或座位上來支撐他自己。
- 還沒有人留言評論。精彩留言會獲得點贊!