基于不同換道風格的汽車安全控制方法、系統及介質與流程
本發明涉及汽車控制,尤其涉及一種基于不同換道風格的汽車安全控制方法、系統及介質。
背景技術:
1、現有技術中的自動駕駛車輛一般會配備基礎的換道輔助功能,同時也會提供人機交互界面供駕駛員在行車過程中根據需要進行不同的換道風格的調整,例如對常見的換道風格,如舒適風格、標準風格和激進風格的調整。
2、在有關車輛換道輔助功能配置的換道風格的用戶體驗方面,不同的換道風格下用戶的安全駕駛體驗差異較大,尤其是系統在激進換道風格下無法及時避開或者提醒用戶危險情況;或者是在舒適風格下,過早進行了避開或者提醒用戶危險情況,導致換道中斷,換道體驗降低。
3、因此,目前一般的自動駕駛換道輔助功能縱向安全距離模型僅針對自車道及目標車道的前后車安全距離進行換道動作及對應的換道風格規劃,無法動態準確獲取不同換道風格下的安全程度,無法保證在不同換道風格下用戶的安全駕駛體驗,也無法保證在不同換道風格和場景下安全策略一致。
技術實現思路
1、針對上述技術問題,本發明提供了一種基于不同換道風格的汽車安全控制方法、系統及介質,至少解決上述背景技術中所述的一種問題。
2、本發明第一方面提供一種基于不同換道風格的汽車安全控制方法,包括:
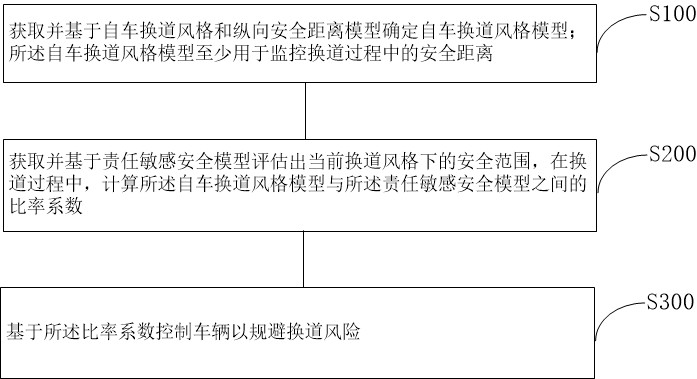
3、獲取并基于自車換道風格和縱向安全距離模型確定自車換道風格模型;所述自車換道風格模型至少用于監控換道過程中的安全距離;
4、獲取并基于責任敏感安全模型評估出當前自車換道風格下的安全范圍;
5、在換道過程中,計算所述自車換道風格模型與所述責任敏感安全模型之間的比率系數;
6、基于所述比率系數控制車輛以規避換道風險。
7、作為一種可選的實施方式,所述獲取并基于責任敏感安全模型評估出當前自車換道風格下的安全范圍,包括:
8、獲取并基于預設響應時間 p內的前車制動減速度最大值 amax,brake,預設響應時間 p內后車以 amax,acce加速后再以 amin,brake剎車直到剎停且不會與前車相撞的距離,同一時刻后車縱向速度 vr和前車縱向速度 vf,生成責任敏感安全模型[ x]+=[ vf p+( amax,accel× p2)/2-( vr+ amax,accel× p)2/2× amin,break+ vf2/2× amax,break]+,且[ x]+=max{x,0};
9、以責任敏感安全模型作為換道過程中的安全距離基線,通過所述安全距離基線評估當前自車換道風格下的安全范圍。
10、作為一種可選的實施方式,所述獲取并基于自車換道風格和縱向安全距離模型確定自車換道風格模型,包括:
11、獲取并基于自車調整參數確定自車換道風格,所述自車調整參數至少包括自車的變道加減速度、車身橫擺角速度和路徑規劃距離;
12、基于所述自車換道風格和縱向安全距離模型確定自車換道風格模型。
13、作為一種可選的實施方式,所述縱向安全距離模型通過以下方式獲取:
14、獲取并基于目標車車速 vobj,自車車速 vego,后車減速度值 a,前車制動時后車的反應時間 t,前后車之間的基本安全距離 s和前后車安全距離系數 coef生成縱向安全距離模型為( vobj- vego)2/2× a+( vobj- vego)× t+ max( s, coef× vego)。
15、作為一種可選的實施方式,當自車為后車,目標車為前車且目標車車速較自車車速慢時,所述縱向安全距離模型為( vobj- vego)2/2×a+( vobj- vego)× t+ max( s, coef× vego);
16、當自車為后車,目標車為前車且目標車車速較自車車速快時,所述縱向安全距離模型為 max( s, coef× vego);
17、當自車為前車,目標車為后車且目標車車速較自車車速快時,所述縱向安全距離模型為( vobj- vego)2/2×a+( vobj- vego)× t+ max( s, coef× vego);
18、當自車為前車,目標車為后車且目標車車速較自車車速慢時,所述縱向安全距離模型為 max( s, coef× vego)。
19、作為一種可選的實施方式,自車換道風格至少包括第一換道風格、第二換道風格和第三換道風格;
20、不同的自車換道風格對應不同的比率系數,其中,所述第一換道風格對應第一比率系數,第二換道風格對應第二比率系數,第三換道風格對應第三比率系數。
21、作為一種可選的實施方式,所述在換道過程中,計算所述自車換道風格模型與所述責任敏感安全模型之間的比率系數,包括:
22、若所述比率系數小于第一比率系數,確定自車處于高風險狀態;
23、若所述比率系數大于第一比率系數且小于第三比率系數,確定自車處于中風險狀態;
24、若所述比率系數大于第三比率系數,確定自車處于低風險狀態。
25、本發明第二方面提供一種基于不同換道風格的汽車安全控制系統,包括:
26、模型獲取單元,至少用于獲取并基于自車換道風格和縱向安全距離模型確定自車換道風格模型;所述自車換道風格模型至少用于監控換道過程中的安全距離;
27、模型評估單元,至少用于獲取并基于責任敏感安全模型評估出當前自車換道風格下的安全范圍;
28、比率計算單元,至少用于在換道過程中,計算所述自車換道風格模型與所述責任敏感安全模型之間的比率系數;
29、車輛控制單元,至少用于基于所述比率系數控制車輛以規避換道風險。
30、本發明第三方面提供一種汽車換道輔助系統,所述汽車換道輔助系統能夠執行如本發明第一方面所述的基于不同換道風格的汽車安全控制方法。
31、本發明第四方面提供一種電子設備,包括:
32、至少一個處理器;以及與所述處理器通信連接的至少一個存儲器,其中:所述存儲器存儲有可被所述處理器執行的程序指令,所述處理器調用所述程序指令能夠執行如本發明第一方面所述的基于不同換道風格的汽車安全控制方法。
33、本發明第五方面提供一種計算機可讀存儲介質,其上存儲有計算機程序,所述計算機程序被計算機運行時,執行如本發明第一方面所述的基于不同換道風格的汽車安全控制方法。
34、本發明通過縱向安全距離模型進行進入換道時機選擇,通過不同的換道風格,得到不同換道風格下的自車換道風格模型及對應的模型曲線,基于責任敏感安全模型進行變道過程安全距離監控,以責任敏感安全模型曲線作為換道安全距離基線,并最終獲得不同換道風格下的自車換道風格模型和責任敏感安全模型曲線的比率系數。基于此,本發明極大地提高了不同換道風格下安全程度獲取的準確性,進而提高自動駕駛系統中換道輔助功能不同換道風格下安全表現一致性和用戶對自動駕駛系統的信任度,保證在不同換道風格和場景下安全策略一致的情況,有利于增強用戶體驗。
- 還沒有人留言評論。精彩留言會獲得點贊!