扭矩斜率控制方法及裝置與流程
本發明涉及車輛領域,特別涉及一種扭矩斜率控制方法及裝置。
背景技術:
1、將電動汽車的扭矩斜率控制在合理的范圍內,有利于保障電動汽車的安全行駛,延長電池、車橋等部件的使用壽命,提升車輛可靠性。因此,如何合理控制電動汽車的扭矩斜率成為本領域人員亟待解決的技術問題。
技術實現思路
1、鑒于上述問題,本發明提供一種克服上述問題或者至少部分地解決上述問題的一種扭矩斜率控制方法及裝置。
2、第一方面,一種扭矩斜率控制方法,包括:
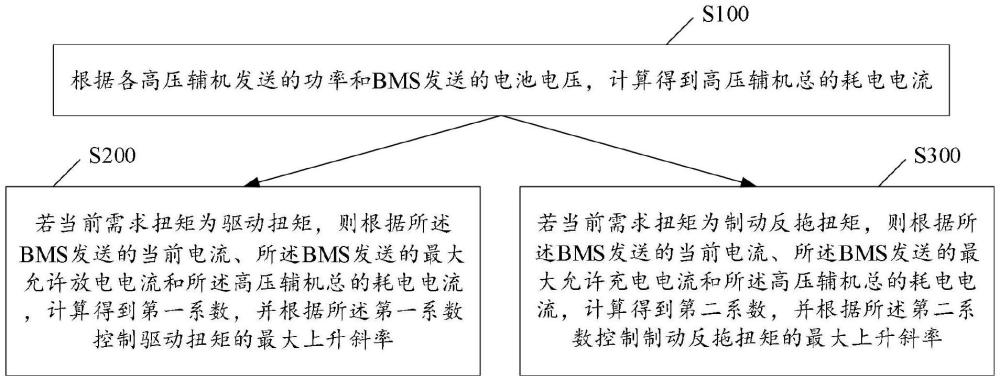
3、根據各高壓輔機發送的功率和bms發送的電池電壓,計算得到高壓輔機總的耗電電流;
4、若當前需求扭矩為驅動扭矩,則根據所述bms發送的當前電流、所述bms發送的最大允許放電電流和所述高壓輔機總的耗電電流,計算得到第一系數,并根據所述第一系數控制驅動扭矩的最大上升斜率;
5、若當前需求扭矩為制動反拖扭矩,則根據所述bms發送的當前電流、所述bms發送的最大允許充電電流和所述高壓輔機總的耗電電流,計算得到第二系數,并根據所述第二系數控制制動反拖扭矩的最大上升斜率。
6、可選的,在某些可選的實施方式中,所述根據各高壓輔機發送的功率和bms發送的電壓,計算得到高壓輔機總的耗電電流,包括:
7、將各所述高壓輔機發送的功率相加,得到高壓輔機總的耗電功率;
8、計算所述高壓輔機總的耗電功率與所述bms發送的電池電壓的商,得到所述高壓輔機總的耗電電流。
9、可選的,在某些可選的實施方式中,在所述若當前需求扭矩為驅動扭矩,則根據所述bms發送的當前電流、所述bms發送的最大允許放電電流和所述高壓輔機總的耗電電流,計算得到第一系數,并根據所述第一系數控制驅動扭矩的最大上升斜率之前,所述方法還包括:
10、當駕駛員踩加速踏板時,獲得加速踏板的開度和電機的轉速;
11、根據所述加速踏板的開度和所述電機的轉速,計算得到對應的驅動扭矩。
12、可選的,在某些可選的實施方式中,所述若當前需求扭矩為驅動扭矩,則根據所述bms發送的當前電流、所述bms發送的最大允許放電電流和所述高壓輔機總的耗電電流,計算得到第一系數,并根據所述第一系數控制驅動扭矩的最大上升斜率,包括:
13、若當前需求扭矩為驅動扭矩,則根據所述bms發送的當前電流、所述bms發送的最大允許放電電流和所述高壓輔機總的耗電電流,計算得到第一系數;
14、根據所述第一系數,查表得到在表中預設的驅動扭矩的第一最大上升斜率;
15、根據所述第一最大上升斜率,控制驅動扭矩的最大上升斜率。
16、可選的,在某些可選的實施方式中,所述若當前需求扭矩為驅動扭矩,則根據所述bms發送的當前電流、所述bms發送的最大允許放電電流和所述高壓輔機總的耗電電流,計算得到第一系數,包括:
17、若當前需求扭矩為驅動扭矩,則計算所述bms發送的最大允許放電電流和所述高壓輔機總的耗電電流的電流差;
18、計算所述bms發送的當前電流與所述電流差的商,得到所述第一系數。
19、可選的,在某些可選的實施方式中,所述根據所述第一最大上升斜率,控制驅動扭矩的最大上升斜率,包括:
20、若所述第一最大上升斜率小于預設的第二最大上升斜率,則控制所述驅動扭矩的最大上升斜率等于所述第一最大上升斜率,其中,所述第二最大上升斜率為:預先在車橋能力限制下試驗得到的電機的驅動扭矩變化斜率;
21、若所述第一最大上升斜率大于預設的第二最大上升斜率,則控制所述驅動扭矩的最大上升斜率等于所述第二最大上升斜率。
22、可選的,在某些可選的實施方式中,在所述若當前需求扭矩為制動反拖扭矩,則根據所述bms發送的當前電流、所述bms發送的最大允許充電電流和所述高壓輔機總的耗電電流,計算得到第二系數,并根據所述第二系數控制制動反拖扭矩的最大上升斜率之前,所述方法還包括:
23、當駕駛員踩制動踏板時,獲得制動踏板的開度和電機的轉速;
24、根據所述制動踏板的開度和所述電機的轉速,計算得到對應的制動反拖扭矩。
25、可選的,在某些可選的實施方式中,所述若當前需求扭矩為制動反拖扭矩,則根據所述bms發送的當前電流、所述bms發送的最大允許充電電流和所述高壓輔機總的耗電電流,計算得到第二系數,并根據所述第二系數控制制動反拖扭矩的最大上升斜率,包括:
26、若當前需求扭矩為制動反拖扭矩,則根據所述bms發送的當前電流、所述bms發送的最大允許充電電流和所述高壓輔機總的耗電電流,計算得到第二系數;
27、根據所述第二系數,查表得到在表中預設的驅動扭矩的第三最大上升斜率;
28、根據所述第三最大上升斜率,控制制動反拖扭矩的最大上升斜率。
29、可選的,在某些可選的實施方式中,所述若當前需求扭矩為制動反拖扭矩,則根據所述bms發送的當前電流、所述bms發送的最大允許充電電流和所述高壓輔機總的耗電電流,計算得到第二系數,包括:
30、若當前需求扭矩為制動反拖扭矩,則計算所述bms發送的最大允許充電電流和所述高壓輔機總的耗電電流的電流和;
31、計算所述bms發送的當前電流與所述電流和的商,得到所述第二系數。
32、可選的,在某些可選的實施方式中,所述根據所述第三最大上升斜率,控制制動反拖扭矩的最大上升斜率,包括:
33、若所述第三最大上升斜率小于預設的第四最大上升斜率,則控制所述制動反拖扭矩的最大上升斜率等于所述第三最大上升斜率,其中,所述第三最大上升斜率為:預先在車橋能力限制下試驗得到的電機的制動反拖扭矩變化斜率;
34、若所述第三最大上升斜率大于預設的第四最大上升斜率,則控制所述制動反拖扭矩的最大上升斜率等于所述第四最大上升斜率。
35、第二方面,一種扭矩斜率控制裝置,包括:輔機總電流單元、驅動斜率控制單元和制動斜率控制單元;
36、所述輔機總電流單元,用于根據各高壓輔機發送的功率和bms發送的電池電壓,計算得到高壓輔機總的耗電電流;
37、所述驅動斜率控制單元,用于若當前需求扭矩為驅動扭矩,則根據所述bms發送的當前電流、所述bms發送的最大允許放電電流和所述高壓輔機總的耗電電流,計算得到第一系數,并根據所述第一系數控制驅動扭矩的最大上升斜率;
38、所述制動斜率控制單元,用于若當前需求扭矩為制動反拖扭矩,則根據所述bms發送的當前電流、所述bms發送的最大允許充電電流和所述高壓輔機總的耗電電流,計算得到第二系數,并根據所述第二系數控制制動反拖扭矩的最大上升斜率。
39、第三方面,一種計算機可讀存儲介質,其上存儲有程序,所述程序被處理器執行時實現上述任一項所述的扭矩斜率控制方法。
40、第四方面,一種電子設備,所述電子設備包括至少一個處理器、以及與所述處理器連接的至少一個存儲器、總線;其中,所述處理器、所述存儲器通過所述總線完成相互間的通信;所述處理器用于調用所述存儲器中的程序指令,以執行上述任一項所述的扭矩斜率控制方法。
41、借由上述技術方案,本發明提供的一種扭矩斜率控制方法及裝置,可以根據各高壓輔機發送的功率和bms發送的電池電壓,計算得到高壓輔機總的耗電電流;若當前需求扭矩為驅動扭矩,則根據所述bms發送的當前電流、所述bms發送的最大允許放電電流和所述高壓輔機總的耗電電流,計算得到第一系數,并根據所述第一系數控制驅動扭矩的最大上升斜率;若當前需求扭矩為制動反拖扭矩,則根據所述bms發送的當前電流、所述bms發送的最大允許充電電流和所述高壓輔機總的耗電電流,計算得到第二系數,并根據所述第二系數控制制動反拖扭矩的最大上升斜率。由此可以看出,本發明可以根據實際情況,準確控制扭矩的上升斜率在合理的范圍內,避免出現因過流導致的電池過熱及壽命降低的問題,也能夠保障車橋的使用壽命及可靠性。
42、上述說明僅是本發明技術方案的概述,為了能夠更清楚了解本發明的技術手段,而可依照說明書的內容予以實施,并且為了讓本發明的上述和其它目的、特征和優點能夠更明顯易懂,以下特舉本發明的具體實施方式。
- 還沒有人留言評論。精彩留言會獲得點贊!