車輛切入意圖的確定方法、裝置、設備及存儲介質與流程
本技術涉及智能車輛,尤其涉及一種車輛切入意圖的確定方法、裝置、設備及存儲介質。
背景技術:
1、在交通領域,許多車輛存在不按照交通規則行駛的駕駛現象,例如:不打轉向燈、隨意變道,對自動駕駛汽車造成一些影響,更嚴重的如果制動不及時或制動力度過大,甚至會導致剮蹭,追尾等交通事故。
2、目前在車輛不打轉向燈的情況下主要是通過車輛的瞬時運動狀態,判斷車輛是否存在切入意圖,但是對于車輛一段時間內的運動趨勢,未進行監測,無法通過車輛橫向速度,車輛航向角等運動狀態的持續變化,識別到車輛的切入意圖。
技術實現思路
1、本技術提供一種車輛切入意圖的確定方法、裝置、設備及存儲介質,以至少解決相關技術中通過一段時間內車輛的運動狀態的橫向速度以及車輛航向角等變化趨勢準確判斷車輛的切入意圖的技術問題。本技術的技術方案如下:
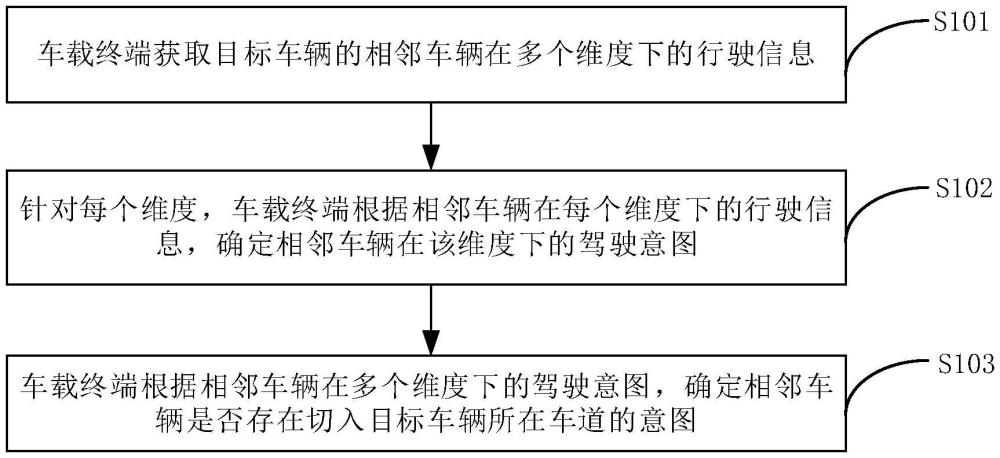
2、根據本技術涉及的第一方面,提供一種車輛切入意圖的確定方法,該方法包括:獲取目標車輛的相鄰車輛在多個維度下的行駛信息;多個維度包括相鄰車輛相對于目標車輛所在車道的距離、相鄰車輛相對于目標車輛所在車道的橫向速度、相鄰車輛相對于目標車輛所在車道的航向角以及相鄰車輛相對于目標車輛所在車道的壓線信息;針對每個維度,根據相鄰車輛在該維度下的行駛信息,確定相鄰車輛在該維度下的駕駛意圖;駕駛意圖用于反映相鄰車輛是否要切換至目標車輛所在的車道;根據相鄰車輛在多個維度下的駕駛意圖,確定相鄰車輛是否存在切入目標車輛所在車道的意圖。
3、根據上述技術手段,本技術可以在獲取到目標車輛的相鄰車輛在多個維度下的行駛信息后,針對每個維度,根據相鄰車輛在該維度下的行駛信息,確定相鄰車輛在該維度下的駕駛意圖;根據相鄰車輛在多個維度下的駕駛意圖,準確確定相鄰車輛是否存在切入目標車輛所在車道的意圖。由此,可以通過相鄰車輛的橫向速度以及車輛航向角等多個維度的行駛信息準確確定相鄰車輛是否存在切入目標車輛所在車道的意圖。
4、在一種可能的實施方式中,上述“根據相鄰車輛在多個維度下的駕駛意圖,確定相鄰車輛是否存在切入目標車輛所在車道的意圖”方法包括:針對每個維度,基于維度的駕駛意圖,確定維度對應的切入權重,以得到每個維度對應的切入權重;根據多個維度的切入權重之和確定相鄰車輛的切入概率;在相鄰車輛的切入概率大于或等于預設閾值的情況下,確定相鄰車輛存在切入目標車輛所在車道的意圖;在相鄰車輛的切入概率小于預設閾值的情況下,確定相鄰車輛不存在切入目標車輛所在車道的意圖。
5、根據上述技術手段,本技術可以基于每個維度的駕駛意圖,確定該維度對應的切入權重,并根據多個維度的切入權重之和確定相鄰車輛的切入概率,在相鄰車輛的切入概率大于或等于預設閾值的情況下,確定相鄰車輛存在切入目標車輛所在車道的意圖。由此,可以準確確定相鄰車輛的切入概率,根據切入概率確定相鄰車輛是否存在切入目標車輛所在車道的意圖。
6、在一種可能的實施方式中,上述維度的駕駛意圖為靠近目標車輛的情況下,維度對應的切入權重為預設權重;維度的駕駛意圖為遠離目標車輛的情況下,維度對應的切入權重為預設權重的相反值;維度的駕駛意圖為穩定行駛的情況下,維度對應的切入權重為0或預設權重。
7、根據上述技術手段,本技術可以根據各個維度的駕駛意圖確定各個維度的切入權重。
8、在一種可能的實施方式中,上述“維度的駕駛意圖為穩定行駛的情況下,維度對應的切入權重為0或預設權重”方法包括:相鄰車輛相對于目標車輛所在車道的距離維度對應的切入權重為0;相鄰車輛相對于目標車輛所在車道的壓線信息維度對應的切入權重為0;相鄰車輛相對于目標車輛所在車道的橫向速度,且橫向速度方向為靠近目標車輛方向的情況下,對應的切入權重為預設權重;相鄰車輛相對于目標車輛所在車道的航向角維度,且航向角方向為靠近目標車輛方向的情況下,對應的切入權重為預設權重。
9、根據上述技術手段,本技術可以在維度的駕駛意圖為穩定行駛的情況下,通過判斷相鄰車輛相對于目標車輛所在車道的橫向速度,且橫向速度方向為靠近目標車輛方向,以及相鄰車輛相對于目標車輛所在車道的航向角維度,且航向角方向為靠近目標車輛方向,確定對應維度的切入權重為預設權重,相反,對應維度的預設權重為0。
10、在一種可能的實施方式中,上述“針對每個維度,根據相鄰車輛在維度下的行駛信息,確定相鄰車輛在維度下的駕駛意圖”方法包括:根據預設時間段內相鄰車輛在維度下的行駛信息,確定相鄰車輛在預設時間段內的行駛狀態;行駛狀態包括相鄰車輛在預設時間段內靠近目標車輛的次數、遠離目標車輛的次數、保持穩定行駛的次數、相鄰車輛的行駛趨勢中的一個或多個;根據相鄰車輛在預設時間段內的行駛狀態,確定相鄰車輛在維度下的駕駛意圖。
11、根據上述技術手段,本技術可以根據預設時間段內相鄰車輛在維度下的行駛信息,確定相鄰車輛在預設時間段內的行駛狀態,根據行駛狀態,準確確定相鄰車輛在維度下的駕駛意圖。
12、在一種可能的實施方式中,上述相鄰車輛為與目標車輛位置距離最近的預設數量的車輛,包括:將相鄰車輛與目標車輛的多個維度下的行駛信息保存到隊列中;隊列的總個數為車輛的個數與維度的個數的乘積;在檢測到目標車輛周圍出現新的車輛的情況下,將新的車輛的行駛信息寫入到隊列中;當隊列的長度達到預設長度的情況下,刪除隊列的頭部信息。
13、根據上述技術手段,本技術可以在檢測到目標車輛周圍出現新的車輛的情況下,將新的車輛的行駛信息寫入到隊列中;當隊列的長度達到預設長度的情況下,刪除隊列的頭部信息。由此,可以通過隊列更好的管理多個車輛。
14、根據本技術提供的第二方面,提供一種車輛切入意圖的確定裝置,包括獲取單元,用于獲取目標車輛的相鄰車輛在多個維度下的行駛信息;多個維度包括相鄰車輛相對于目標車輛所在車道的距離、相鄰車輛相對于目標車輛所在車道的橫向速度、相鄰車輛相對于目標車輛所在車道的航向角以及相鄰車輛相對于目標車輛所在車道的壓線信息;確定單元,用于針對每個維度,根據相鄰車輛在維度下的行駛信息,確定相鄰車輛在維度下的駕駛意圖;駕駛意圖用于反映相鄰車輛是否要切換至目標車輛所在的車道;確定單元,還用于根據相鄰車輛在多個維度下的駕駛意圖,確定相鄰車輛是否存在切入目標車輛所在車道的意圖。
15、在一種可能的實施方式中,上述確定單元,具體用于針對每個維度,基于維度的駕駛意圖,確定維度對應的切入權重,以得到每個維度對應的切入權重;根據多個維度的切入權重之和確定相鄰車輛的切入概率;在相鄰車輛的切入概率大于或等于預設閾值的情況下,確定相鄰車輛存在切入目標車輛所在車道的意圖;在相鄰車輛的切入概率小于預設閾值的情況下,確定相鄰車輛不存在切入目標車輛所在車道的意圖。
16、在一種可能的實施方式中,上述確定單元,具體還用于維度的駕駛意圖為靠近目標車輛的情況下,維度對應的切入權重為預設權重;維度的駕駛意圖為遠離目標車輛的情況下,維度對應的切入權重為預設權重的相反值;維度的駕駛意圖為穩定行駛的情況下,維度對應的切入權重為0或預設權重。
17、在一種可能的實施方式中,上述確定單元,具體還包括相鄰車輛相對于目標車輛所在車道的距離維度對應的切入權重為0;相鄰車輛相對于目標車輛所在車道的壓線信息維度對應的切入權重為0;相鄰車輛相對于目標車輛所在車道的橫向速度,且橫向速度方向為靠近目標車輛方向的情況下,對應的切入權重為預設權重;相鄰車輛相對于目標車輛所在車道的航向角維度,且航向角方向為靠近目標車輛方向的情況下,對應的切入權重為預設權重。
18、在一種可能的實施方式中,上述確定單元,具體還用于根據預設時間段內相鄰車輛在維度下的行駛信息,確定相鄰車輛在預設時間段內的行駛狀態;行駛狀態包括相鄰車輛在預設時間段內靠近目標車輛的次數、遠離目標車輛的次數、保持穩定行駛的次數、相鄰車輛的行駛趨勢中的一個或多個;根據相鄰車輛在預設時間段內的行駛狀態,確定相鄰車輛在維度下的駕駛意圖。
19、在一種可能的實施方式中,上述確定單元,具體還用于將相鄰車輛與目標車輛的多個維度下的行駛信息保存到隊列中;隊列的總個數為車輛的個數與維度的個數的乘積;在檢測到目標車輛周圍出現新的車輛的情況下,將新的車輛的行駛信息寫入到隊列中;當隊列的長度達到預設長度的情況下,刪除隊列的頭部信息。
20、根據本技術提供的第三方面,提供一種電子設備,包括:處理器;用于存儲處理器可執行指令的存儲器;其中,處理器被配置為執行指令,以實現上述第一方面及其任一種可能的實施方式的方法。
21、根據本技術提供的第四方面,提供一種車輛,包括上述第三方面提供的電子設備。
22、根據本技術提供的第五方面,提供一種計算機可讀存儲介質,當計算機可讀存儲介質中的指令由電子設備的處理器執行時,使得電子設備能夠執行上述第一方面中及其任一種可能的實施方式的方法。
23、根據本技術提供的第六方面,提供一種計算機程序產品,計算機程序產品包括計算機指令,當計算機指令在電子設備上運行時,使得電子設備執行上述第一方面及其任一種可能的實施方式的方法。
24、由此,本技術的上述技術特征具有以下有益效果:
25、(1)可以在獲取到目標車輛的相鄰車輛在多個維度下的行駛信息后,針對每個維度,根據相鄰車輛在該維度下的行駛信息,確定相鄰車輛在該維度下的駕駛意圖;根據相鄰車輛在多個維度下的駕駛意圖,準確確定相鄰車輛是否存在切入目標車輛所在車道的意圖。由此,可以通過相鄰車輛的橫向速度以及車輛航向角等多個維度的行駛信息準確確定相鄰車輛是否存在切入目標車輛所在車道的意圖。
26、(2)可以基于每個維度的駕駛意圖,確定該維度對應的切入權重,并根據多個維度的切入權重之和確定相鄰車輛的切入概率,在相鄰車輛的切入概率大于或等于預設閾值的情況下,確定相鄰車輛存在切入目標車輛所在車道的意圖。由此,可以準確確定相鄰車輛的切入概率,根據切入概率確定相鄰車輛是否存在切入目標車輛所在車道的意圖。
27、(3)可以根據各個維度的駕駛意圖確定各個維度的切入權重。
28、(4)可以在維度的駕駛意圖為穩定行駛的情況下,通過判斷相鄰車輛相對于目標車輛所在車道的橫向速度,且橫向速度方向為靠近目標車輛方向,以及相鄰車輛相對于目標車輛所在車道的航向角維度,且航向角方向為靠近目標車輛方向,確定對應維度的切入權重為預設權重,相反,對應維度的預設權重為0。
29、(5)可以根據預設時間段內相鄰車輛在維度下的行駛信息,確定相鄰車輛在預設時間段內的行駛狀態,根據行駛狀態,準確確定相鄰車輛在維度下的駕駛意圖。
30、(6)可以在檢測到目標車輛周圍出現新的車輛的情況下,將新的車輛的行駛信息寫入到隊列中;當隊列的長度達到預設長度的情況下,刪除隊列的頭部信息。由此,可以通過隊列更好的管理多個車輛。
31、需要說明的是,第二方面至第六方面中的任一種實現方式所帶來的技術效果可參見第一方面中對應實現方式所帶來的技術效果,此處不再贅述。
32、應當理解的是,以上的一般描述和后文的細節描述僅是示例性和解釋性的,并不能限制本技術。
- 還沒有人留言評論。精彩留言會獲得點贊!