一種基于模糊縱側耦合模型的智能汽車事件觸發控制方法
本發明涉及一種智能汽車縱側向耦合控制,特別是一種基于模糊縱側耦合模型的智能汽車事件觸發控制方法。
背景技術:
1、智能汽車縱側向耦合控制系統為一類非線性的網絡控制系統,所述網絡控制系統指代搭載有各種局域通信網絡的系統。在動態復雜場景下,智能汽車縱側向耦合控制呈現強非線性特性,這對其建模提出了新的挑戰。固有的非線性特性,如輪胎側偏剛度、時變車速、車身轉動慣量、質量及不確定干擾等。所述不確定干擾指代構建智能汽車動力學模型帶來的建模偏差所造成的干擾以及外部隨機環境造成的實時干擾。如果不能很好地處理智能汽車縱側向耦合控制中的所述非線性及干擾,將導致智能汽車跟蹤精度和穩定性下降。此外,智能汽車縱側向耦合控制系統的通信資源往往是有限的,通信資源在每個采樣時刻進行更新和傳輸,這將浪費大量沒有必要傳輸的通信資源,甚至會導致通信擁塞。
2、傳統的智能汽車縱側向耦合控制方法中,在構建智能汽車縱側向耦合模型時很少考慮強非線性特性,這將影響智能汽車縱側向耦合控制性能,嚴重時威脅到生命財產安全。并且傳統的基于時間觸發策略的智能汽車縱側向耦合控制方法將浪費大量通信資源。所述時間觸發策略指代通信資源在每個采樣時刻進行傳輸和更新。
技術實現思路
1、為解決現有技術存在的上述問題,本發明的目的在于提供一種基于模糊縱側耦合模型的智能汽車事件觸發控制方法,能有效提升智能汽車縱側向耦合控制的精度、穩定性及節省通信資源。
2、為了實現上述目的,本發明的技術方案如下:
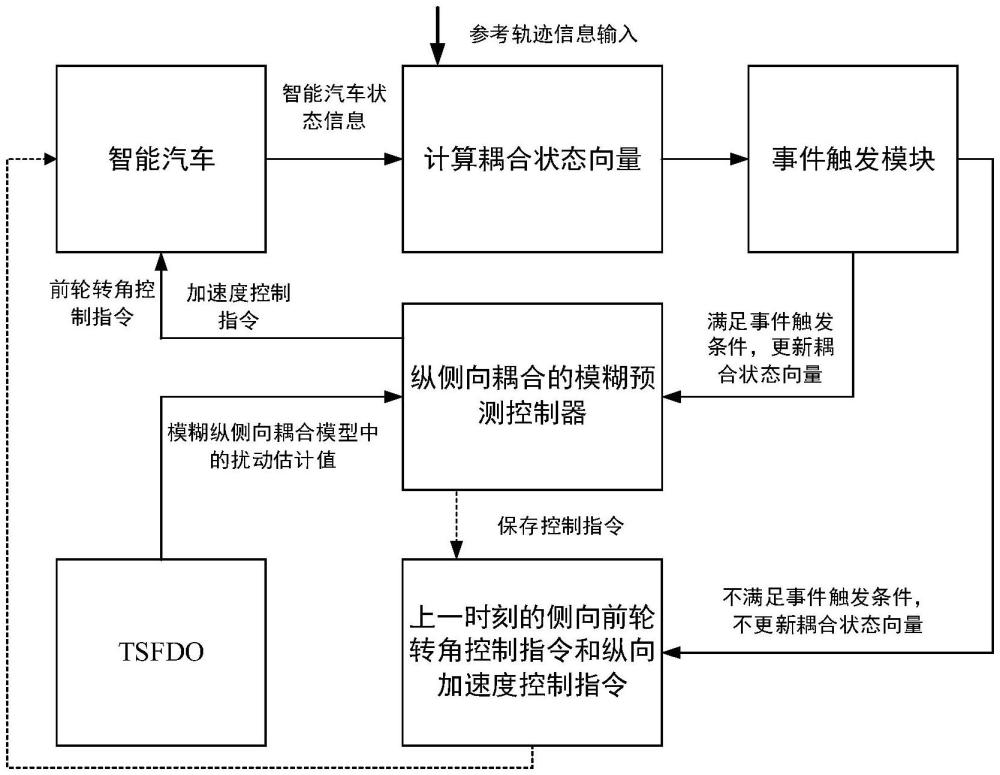
3、一種基于模糊縱側耦合模型的智能汽車事件觸發控制方法,利用智能汽車事件觸發控制系統進行控制,所述智能汽車事件觸發控制系統包括初始化模塊、事件觸發模塊、tsfdo和縱側向耦合的模糊預測控制器。所述tsfdo為ts模糊擾動觀測器的簡稱。
4、所述初始化模塊用于檢查感知模塊、定位模塊、規劃模塊及底盤模塊信號收發是否正常;檢查參考軌跡信息的加載是否正常,所述參考軌跡信息包含參考位置、參考道路曲率、參考航向、參考加速度及參考速度;加載線性智能汽車三自由度動力學模型參數;加載事件觸發模塊的參數;加載模糊縱側向耦合模型的參數;加載tsfdo的參數;加載縱側向耦合的模糊預測控制器的參數。
5、所述事件觸發模塊根據事件觸發閾值函數和所述模糊縱側向耦合模型中的耦合狀態向量設計得到,所述事件觸發模塊決定所述耦合狀態向量是否更新到縱側向耦合的模糊預測控制器中。所述自適應觸發閾值指代設計的自適應的閾值函數。所述耦合狀態向量的元素包括速度誤差、側向速度、偏航率、側向誤差及航向誤差,所述速度誤差指代智能汽車的當前速度與參考速度的差值,所述側向誤差指代智能汽車的當前位置與參考位置的差值,所述航向誤差指代智能汽車的當前航向與參考航向的差值;所述智能汽車的當前狀態信息包括位置信息、航向、縱向速度、側向速度及偏航率。
6、所述tsfdo用于估計模糊縱側耦合模型中的非線性造成的干擾,得到當前時刻的擾動值,并將tsfdo估計的當前時刻的擾動值嵌入到模糊縱側耦合模型的迭代優化中。
7、所述模糊縱側耦合模型由所述線性智能汽車三自由度動力學模型和所述參考軌跡信息進行數學計算并以數學方程形式建模得到。所述縱側向耦合的模糊預測控制器基于模糊縱側耦合模型進行迭代優化設計得到,所述縱側向耦合的模糊預測控制器利用所述耦合狀態向量、輸入控制向量和tsfdo的估計值進行迭代優化求解獲得側向前輪轉角控制指令和縱向加速度控制指令。所述輸入控制向量為上一時刻輸入到智能汽車中前輪轉角和加速度。
8、所述控制方法包括以下步驟:
9、步驟1:初始化
10、初始化模塊檢查感知模塊信息、定位模塊信息、規劃模塊信息及底盤模塊信息收發是否正常;檢查目標軌跡信息的加載是否正常;所述感知模塊信息、定位模塊信息、規劃模塊信息及底盤模塊信息分別指代環境障礙物信息、智能汽車狀態信息、參考軌跡和智能汽車底盤狀態信號;所述智能汽車狀態信息包括智能汽車的位置、航向、縱向速度、側向速度及偏航率;所述參考軌跡信息包含參考位置、參考道路曲率、參考航向、參考加速度及參考速度;所述智能汽車底盤狀態信號包含底盤實際執行的前輪轉角、油門、制動壓力及行駛擋位;
11、初始化模塊加載線性智能汽車三自由度動力學模型參數,加載模糊縱側耦合模型的參數,加載事件觸發模塊的參數,加載tsfdo的參數,加載縱側向耦合的模糊預測控制器參數。所述線性智能汽車三自由度動力學模型參數和模糊縱側向耦合模型的參數均包括智能汽車的質量、前后車軸中心到質心處的距離、前后軸輪胎的側偏剛度及轉動慣量;所述事件觸發模塊的參數包括事件觸發的初始閾值、事件觸發的權重矩陣及事件觸發閾值函數中的預設常數;所述tsfdo的參數包括設計的增益矩陣;所述縱側向耦合的模糊預測控制器參數包括預測時域、控制時域、耦合狀態向量的權重矩陣及輸入控制向量的權重矩陣。
12、所述線性智能汽車三自由度動力學模型的數學方程如下:
13、
14、式中:fxf和fxr分別為前后輪的輪胎縱向力;fxdis、fydis、mzdis分別為輪胎縱向力、輪胎側向力及偏航力矩的不確定性值。cαf和cαr分別為前后軸輪胎的側偏剛度,m為智能汽車質量;vy為側向速度;為側向加速度;vx為縱向速度;為偏航率;為偏航角加速度;iz為車身轉動慣量;lf和lr分別為前后車軸到質心處的距離;δf為前輪轉角。
15、步驟2:建立模糊縱側耦合模型
16、根據步驟1實時獲取智能汽車狀態信息和參考軌跡信息,然后計算智能汽車狀態信息與參考軌跡信息之間的速度誤差、側向誤差及航向誤差,計算公式如下:
17、
18、式中:ed為側向誤差,為側向誤差變化率,為航向誤差,為航向誤差變化率,kr為道路曲率,f1和f2分別為影響側向誤差和航向誤差的不確定性干擾,ld為預覽距離起到促使智能汽車提前轉向的作用,為縱向速度變化率,vref為目標速度,aref為目標加速度,ev為速度誤差,為速度誤差變化率,a是作用在前后輪的驅動力所產生的縱向加速度。
19、根據所述耦合狀態向量、tsfdo和步驟1中的線性智能汽車三自由度動力學模型建立模糊縱側耦合模型,模糊縱側耦合模型的數學方程為:
20、
21、式中:t指代模糊縱側耦合模型按采樣周期hs運行的連續時間;
22、
23、其中,hi(σ(t))為模糊權重函數,hi(σ(t))≥0,
24、
25、定義第1個前件變量σ1(t)=vx,和均為σ1(t)的隸屬度函數;定義第2個前件變量σ2(t)=1/vx,和均為σ2(t)的隸屬度函數;定義第3個前件變量σ3(t)=ld,和均為σ3(t)的隸屬度函數;定義第4個前件變量σ4(t)=1/m,和均為σ4(t)的隸屬度函數;定義第5個前件變量σ5(t)=1/iz,和均為σ5(t)的隸屬度函數;和滿足以下關系:
26、
27、式中,j=1,2,3,4,5,j指代第j個前件變量;和vx分別為vx的最大值和最小值,和ld分別為ld的最大值和最小值,和m分別為m的最大值和最小值,且分別滿足m=m0-δm,m0為智能汽車質量的標稱值,δm是m0的變動值,和iz分別為iz的最大值和最小值,且分別滿足iz=iz0-δiz,iz0為智能汽車轉動慣量的標稱值,δiz是iz0變動值;x(t)為所述模糊縱側耦合模型的狀態向量為x(t)的一階微分;ai為x(t)的系數矩陣,bi為輸入控制向量u(t)的系數矩陣,δai和δbi是模糊縱側耦合模型中因前后軸輪胎側偏剛度攝動所導致的不確定性矩陣;輸入控制向量為u(t)=[δf?a]t;c1和c2分別為x(t)的系數矩陣用于確定和y(t),受控輸出狀態向量被定義為測量輸出狀態向量y(t)被定義為wi(t)被視為模糊縱側耦合模型的擾動。
28、定義矩陣a、b、δa、δb和w(t),a、b、δa、δb和w(t)的表達式分別如下:
29、
30、
31、a1=-(cαf0+cαr0)/vx
32、a2=(cαr0lr-cαf0lf)/vx
33、a3=-(cαf0lf-cαr0lr)/vx
34、
35、b1=cαf0
36、b2=cαf0lf
37、cαf=cαf0+λfδcαf
38、cαr=cαr0+λrδcαr
39、式中,cαf0和cαr0分別為前后軸輪胎側偏剛度的標稱值,δcαf和δcαr分別是前后軸輪胎側偏剛度的標稱值的變動值,λf是δcαf的時變系數,λr是δcαr的時變系數,λf和λr分別滿足數學關系|λf|≤1和|λr|≤1;和為δa中的元素,和為δb中的元素。
40、用或vx、1/vx或或ld、1/m或1/iz或分別替換a中的vx、1/vx、ld、1/m、1/iz形成模糊縱側耦合模型中第i個子系統的狀態向量x(t)的系數矩陣ai,i指代模糊縱側耦合模型中對應的子系統的序號;用或vx、1/vx或或ld、1/m或1/iz或分別替換b中的vx、1/vx、ld、1/m、1/iz形成模糊縱側耦合模型中第i個子系統的輸入控制向量u(t)的系數矩陣bi;用或vx、1/vx或或ld、1/m或1/iz或分別替換δa中的vx、1/vx、ld、1/m、1/iz形成模糊縱側耦合模型中第i個子系統中的前軸輪胎側偏剛度攝動所導致的不確定性矩陣δai;用或vx、1/vx或或ld、1/m或1/iz或分別替換δb中的vx、1/vx、ld、1/m、1/iz形成模糊縱側耦合模型中第i個子系統中的前軸輪胎側偏剛度攝動所導致的不確定性矩陣δbi;用或vx、1/vx或或ld、1/m或1/iz或分別替換wi(t)中的vx、1/vx、ld、1/m、1/iz形成模糊縱側耦合模型中第i個子系統中的模糊縱側耦合模型中的擾動wi(t)。
41、步驟3:判斷事件觸發條件是否滿足
42、所述事件觸發模塊由事件觸發條件構成,根據步驟2中計算的耦合狀態向量設計所述事件觸發條件,其數學表達式為:
43、
44、式中:hs為采樣周期長度,l為采樣周期的個數,tk指第k個采樣周期,tk+1指第k+1個采樣周期。為事件觸發的權重矩陣,且是正定的。x(tk+lhs)為當前采樣時刻的狀態向量,x(tkhs)為最新事件觸發時刻的狀態向量。為事件觸發閾值函數,被設計為:
45、
46、式中:θ1>0,θ0>0是設定的常數,為事件觸發的初始閾值。
47、步驟4:估計模糊縱側耦合模型中的非線性造成的干擾
48、結合步驟2中計算的耦合狀態向量和建立的模糊縱側耦合模型設計tsfdo,tsfdo的數學方程式為:
49、
50、式中:zi(t)是tsfdo的內部狀態變量,是zi(t)的一階微分形式,k是tsfdo的增益矩陣,是wi(t)的估計值。
51、步驟5:進行模糊縱側耦合模型離散化及狀態預測
52、對步驟2中建立的模糊縱側耦合模型進行離散化,模糊縱側耦合模型離散化后的數學方程為:
53、
54、式中:k指代模糊縱側耦合模型離散化后的采樣步長;
55、ξ(k)=[x(k),u(k-1)]t
56、
57、cd=[c2,05×2]
58、
59、bd=bxhs
60、
61、ax=ai+δai
62、bx=bi+δbi
63、
64、式中,和為δai和δbi中的元素,ξ(k)為離散后的模糊縱側耦合模型在k時刻的狀態向量,所述狀態向量包含每個采樣時刻對應的速度誤差、側向速度、偏航率、側向誤差、航向誤差及上一時刻的輸入控制向量u(k-1),x(k)為x(t)離散形式;ξ(k+1)為離散后的模糊縱側耦合模型在k+1時刻的狀態向量;為離散后的模糊縱側耦合模型中ξ(k)的系數矩陣,02×2為2×2的零矩陣,i2×2為2×2單位矩陣,i5×5為5×5單位矩陣,ad和bd為均為矩陣中的元素;為離散后的模糊縱側耦合模型中的系數矩陣,bd是矩陣中的元素;為k時刻的輸入控制向量u(k)與上一時刻的輸入控制向量u(k-1)的差值;為離散化后的測量輸出狀態向量,cd為ξ(k)的系數矩陣;為該模型離散化后的擾動,在數學指代5行1列的向量,由和02×1構成,02×1為2×1的零向量。
65、設置預測時域np和控制時域nc,并將步驟4中對wi(t)的估計值嵌入到模糊縱側耦合模型的迭代優化中。最后,通過迭代預測方式確定離散化后的模糊縱側耦合模型在預測時域內的輸出狀態方程為:
66、
67、式中:ψ(k)及δu(k)分別為模糊縱側耦合模型在預測時域內的輸出狀態向量及輸入控制向量序列;ψ(k)為ξ(k)的系數矩陣;θ為δu(k)的系數矩陣;為模糊縱側耦合模型在預測時域內的擾動向量;s為的系數矩陣;計算公式如下:
68、
69、
70、步驟6:設置時域約束并進行最優化求解
71、根據步驟5中確定的模糊縱側耦合模型在預測時域內的輸出狀態向量及輸入控制向量序列設計縱側向耦合的模糊預測控制器的目標函數j(k)如下:
72、
73、再結合步驟5中確定的模糊縱側耦合模型在預測時域內的輸出狀態方程,將j(k)轉換成含多重安全時域約束的標準二次規劃問題,數學方程形式為:
74、
75、式中:umin為u(k)的時域約束最小值,umax為u(k)的時域約束最大值;為的時域約束最小值,為的時域約束最大值;q和r分別為縱側向耦合的模糊預測控制器在預測時域內的輸出狀態向量權重矩陣及輸入控制向量的權重矩陣。為縱側向耦合的模糊預測控制器在k時刻的解,即為最優的輸入控制向量,計算公式如下:
76、
77、故縱側向耦合的模糊預測控制器的最終輸入控制向量為
78、
79、式中:和a*(k)分別為縱側向耦合的模糊預測控制器計算得到的最優的側向前輪轉角控制指令和縱向加速度控制指令。
80、縱側向耦合的模糊預測控制器在每次計算側向前輪轉角控制指令和縱向加速度控制指令之前,均需要判斷步驟3中的事件觸發條件是否滿足,如果滿足則將模糊縱側耦合模型中的耦合狀態向量更新到縱側向耦合的模糊預測控制器中以計算側向前輪轉角控制指令和縱向加速度控制指令;如果不滿足,則不更新,保留上一時刻的側向前輪轉角控制指令和縱向加速度控制指令。
81、步驟7:進行縱側向耦合的事件觸發控制
82、將步驟6確定的側向前輪轉角控制指令和縱向加速度控制指令下發給智能汽車,智能汽車根據側向前輪轉角控制指令和縱向加速度控制指令對智能汽車進行縱側向耦合的事件觸發控制,實現精確的路徑跟蹤和速度跟蹤,并且節省大量通信資源。進一步地,判斷智能汽車是否到達目的地,若是,則完成控制任務,否則轉步驟1。
83、本發明具有以下有益效果:
84、1、本發明考慮智能汽車在動態復雜場景下縱側向耦合控制中的強非線性特性,建立了模糊縱側耦合模型有效處理了所述強非線性特性;設計了tsfdo以消除模糊縱側耦合模型中的干擾;通過求解模糊縱側耦合模型得到側向前輪轉角控制指令和縱向加速度控制指令以高效應對大曲率高速場景,具備很好的跟蹤精度、魯棒性和穩定性。
85、2、本發明充分考慮了智能汽車縱側向耦合控制系統的通信資源是有限的,設計了一個事件觸發條件來決定模糊縱側耦合模型中的耦合狀態向量是否更新到縱側向耦合的模糊預測控制器中,節省了大量的通信資源,同時也可以保證很好的跟蹤穩定性。
- 還沒有人留言評論。精彩留言會獲得點贊!