控制方法、控制裝置和智能駕駛設備與流程
本技術涉及智能駕駛領域,更具體地,涉及一種控制方法、控制裝置和智能駕駛設備。
背景技術:
1、自動泊車(auto?parking,ap)是指車輛自動泊車入位,即自動駕駛系統可以半自動或者全自動地幫助用戶將車輛停入車位。自動泊車可以包括自動泊車輔助(autoparking?assist,apa)、遙控泊車輔助(remote?parking?assist,rpa)以及自動代客泊車(auto?valet?parking,avp)等。
2、當前的自動泊車系統支持基于用戶選擇的泊車位,控制車輛泊入。然而,在自動泊車系統根據用戶選擇的泊車位進行泊車路徑規劃時,規劃的泊車路徑較為單一,在駕駛環境較為復雜的情況下,例如,存在障礙物占據車輛行駛路徑,容易導致車輛通行效率較低,甚至造成車輛與障礙物發生碰撞或者泊車失敗。
3、鑒于此,一種能夠提高車輛在復雜駕駛環境下通行效率的控制方案亟待開發。
技術實現思路
1、本技術提供一種控制方法、控制裝置和智能駕駛設備,能夠提高車輛的通行效率和安全性,從而提高自動泊車的成功率和效率,進而提高用戶的使用體驗。
2、第一方面,提供了一種控制方法,該方法可以由智能駕駛設備執行;或者,也可以由智能駕駛設備的計算平臺執行;或者,還可以由用于智能駕駛設備的芯片或電路執行;或者,還可以由與智能駕駛設備相關聯的云端服務器或移動終端執行,本技術對此不作具體限定。
3、本技術涉及的智能駕駛設備可以包括路上交通工具、水上交通工具、空中交通工具、工業設備、農業設備、或娛樂設備等。例如智能駕駛設備可以為車輛,該車輛為廣義概念上的車輛,可以是交通工具(如商用車、乘用車、摩托車、飛行車、火車等),工業車輛(如:叉車、掛車、牽引車等),工程車輛(如挖掘機、推土車、吊車等),農用設備(如割草機、收割機等),游樂設備,玩具車輛等,本技術實施例對車輛的類型不作具體限定。再如,智能駕駛設備可以為飛機、或輪船等交通工具。
4、該方法包括:接收第一指令,根據該第一指令控制第一界面顯示第一圖標,該第一圖標指示智能駕駛設備的目標區域的第一邊界和第二邊界;根據該第一圖標,控制該智能駕駛設備從該第一邊界或該第二邊界行駛至該目標區域。
5、在上述技術方案中,可以根據用戶選擇的目標區域的多個邊界為智能駕駛設備規劃運動路徑,有助于提高智能駕駛設備運動軌跡規劃的靈活性,從而提高智能駕駛設備的行車效率和泊車成功率,進而提高用戶的使用體驗。
6、示例性地,發生下列任一項操作時生成第一指令:
7、1、用戶發出特定語音指令的操作,如“智能助手,開啟遙控泊車”、“智能助手,請向右側第一個位置泊車”、“智能助手,請掉轉虛擬車位的朝向”等。
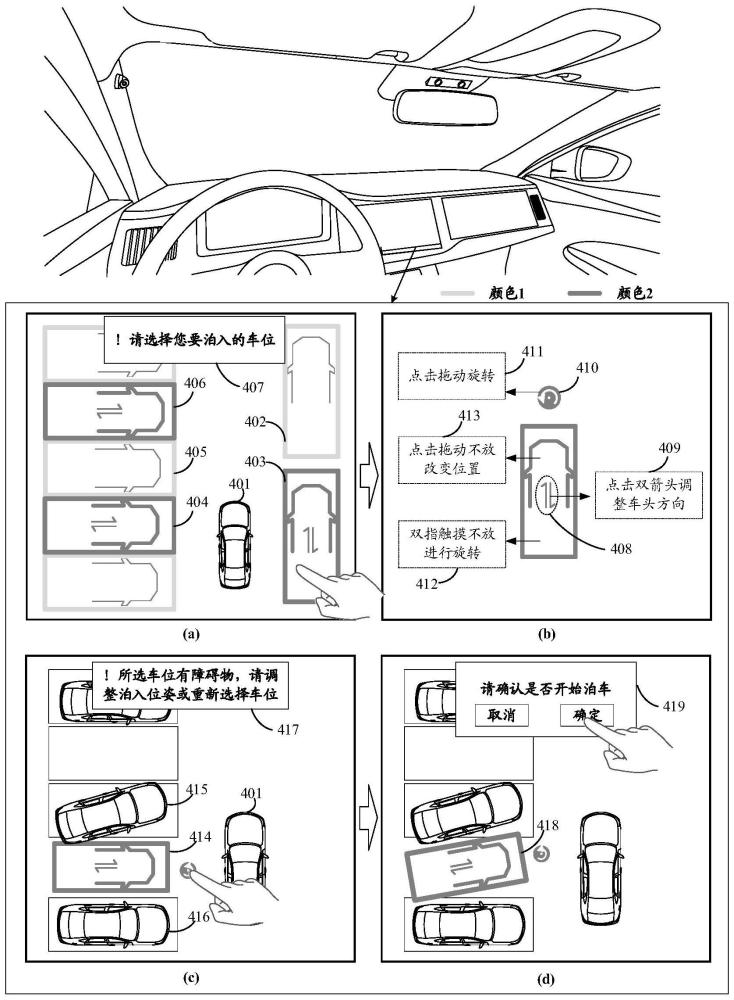
8、2、第一界面中顯示至少一個指示可停泊區域的圖標,該至少一個圖標包括第一圖標,在檢測到用戶點擊第一圖標的操作時,生成第一指令。
9、3、第一界面中僅顯示一個指示可停泊區域的圖標,在第一時長內未檢測到用戶的任何操作時,生成第一指令,該唯一一個指示可停泊區域的圖標即為第一圖標。其中,第一時長可以為3秒,或者5秒,或者也可以為其他時長。
10、4、第一界面中顯示指示智能駕駛設備位置的圖標或圖像,以及智能駕駛設備周圍環境的圖像,在檢測到用戶長按指示智能駕駛設備位置的圖標或圖像時,生成第一指令。進一步地,根據第一指令控制在該指示智能駕駛設備位置的圖標或圖像的位置顯示第一圖標。其中,長按可以為點擊圖標或圖像的時長超過第二時長,該第二時長可以為1秒,或者2秒,或者也可以為其他時長。
11、5、第一界面中顯示指示智能駕駛設備位置的圖標或圖像,以及智能駕駛設備周圍環境的圖像,在檢測到用戶長按指示智能駕駛設備位置的圖標或圖像、且手指保持長按拖動至第一界面的其他位置后釋放手指時,生成第一指令。進一步地,根據第一指令控制在該其他位置顯示第一圖標。
12、6、第一界面中顯示指示智能駕駛設備位置的圖標或圖像,以及智能駕駛設備周圍環境的圖像,檢測到用戶長按空白區域的操作時,生成第一指令。進一步地,根據第一指令控制在該空白區域顯示第一圖標。
13、7、第一界面中顯示指示智能駕駛設備位置的圖標或圖像,以及智能駕駛設備周圍環境的圖像,檢測到用戶在點擊圖標創建按鈕后在第一界面中的空白區域點擊的操作時,生成第一指令。進一步地,根據第一指令控制在該空白區域顯示第一圖標。
14、8、第一界面中顯示第三圖標,檢測到用戶針對第三圖標的相關位置的操作時,生成第一指令。進一步地,根據第一指令顯示第一圖標。其中,第三圖標與第一圖標指示的智能駕駛設備的位姿不同;第三圖標的相關位置包括但不限于:第三圖標的旋轉按鈕、第三圖標中間的雙箭頭、第三圖標的空白位置;用戶針對第三圖標的相關位置的操作包括但不限于:點擊、長按并旋轉、長按并拖動。
15、結合第一方面,在第一方面的某些實現方式中,該控制該智能駕駛設備從該第一邊界或該第二邊界行駛至該目標區域,包括:在第一規劃路徑中存在障礙物時,控制該智能駕駛設備從該第一邊界行駛至該目標區域,該第一規劃路徑指示該智能駕駛設備從當前所處區域經該第二邊界行駛至該目標區域;或者,在第二規劃路徑中存在障礙物時,控制該智能駕駛設備從該第二邊界行駛至該目標區域,該第二規劃路徑指示該智能駕駛設備從該當前所處區域經該第一邊界行駛至該目標區域。
16、在上述技術方案中,在障礙物阻礙智能駕駛設備從一個邊界行駛至目標區域時,可以控制智能駕駛設備從另一邊界行駛至目標區域,有助于提高智能駕駛設備的行車效率和泊車成功率,能夠降低智能駕駛設備與障礙物碰撞的概率,從而提高智能駕駛設備的安全性。
17、結合第一方面,在第一方面的某些實現方式中,該根據第一指令控制第一界面顯示第一圖標,包括:根據該第一指令控制該第一界面的第一位置顯示該第一圖標;在該第一位置指示的實際區域存在障礙物,或者該實際區域的邊界與障礙物之間的距離小于或等于預設距離閾值時,控制該第一界面由該第一位置變更至第二位置顯示該第一圖標。
18、示例性地,預設距離閾值可以為5厘米,或者10厘米,或者也可以為其他數值。
19、示例性地,第二位置指示的實際區域無障礙物,該實際區域的邊界與障礙物之間的距離大于預設距離閾值。
20、需要說明的是,本技術實施例涉及的實際區域為現實場景中的一個區域。
21、在一些可能的實現方式中,可以根據障礙物的圖像在第一界面上顯示的位置,確定第二位置;或者,也可以根據障礙物的實際位置確定可泊車區域的實際位置,進而將實際位置映射至第一界面上的第二位置。
22、在上述技術方案中,可以根據障礙物的位置,自適應調整目標區域,使得智能駕駛設備根據調整后的目標區域規劃運動路徑,有助于提高智能駕駛設備的智能性,進而提高用戶的駕乘體驗;還有助于降低智能駕駛設備行駛過程與障礙物發生碰撞的機率,進而提高智能駕駛設備的安全性。
23、結合第一方面,在第一方面的某些實現方式中,該方法還包括:根據第二指令控制該第一界面顯示虛擬設備圖像,該虛擬設備圖像位于該第一界面的第三位置,該虛擬設備圖像指示該智能駕駛設備的當前所處區域;該根據第一指令控制第一界面顯示第一圖標,包括:根據該第一指令和該第三位置控制該第一界面的第四位置顯示該第一圖標。
24、在上述技術方案中,可以控制第一界面同時顯示指示智能駕駛設備所處位置的圖標或圖像,以及第一圖標,在用戶通過移動第一圖標調整目標區域的過程中,可以根據智能駕駛設備所處位置確定移動后第一圖標的位置,有助于用戶更高效的選擇目標區域,提高通行效率和/或泊車效率,進而提高用戶體驗。
25、結合第一方面,在第一方面的某些實現方式中,該第四位置與該第三位置部分重合或全部重合。
26、在上述技術方案中,支持第一圖標與指示智能駕駛設備所處位置的圖標或圖像全部重合或部分重合,有助于用戶在指示智能駕駛設備所處位置的圖標或圖像上調整第一圖標的位姿,進而實現對智能駕駛設備所處位置以及智能駕駛設備的姿態進行微調,有助于提高用戶調整智能駕駛設備位姿的便捷性,進而提高用戶體驗。
27、結合第一方面,在第一方面的某些實現方式中,該目標區域包括可泊車區域,該第一界面中還包括第二圖標,該第二圖標指示不可泊車區域,該根據第一指令控制第一界面顯示第一圖標,包括:根據該第一指令控制該第一界面通過第一顏色顯示該第一圖標,通過第二顏色顯示該第二圖標。
28、在上述技術方案中,分別通過不同顏色顯示用于指示可泊車區域的圖標和不可泊車區域的圖標,便于用戶區分哪些區域可泊車或可行駛,從而提高選擇目標區域時的效率,進而提高智能駕駛設備的通行效率和/或泊車效率。
29、結合第一方面,在第一方面的某些實現方式中,該第一圖標指示該智能駕駛設備在該目標區域的第一位姿,該根據第一指令控制第一界面顯示第一圖標,包括:根據該第一指令控制該第一界面由顯示第三圖標切換為顯示該第一圖標,該第三圖標指示該智能駕駛設備在該目標區域的第二位姿。
30、在上述技術方案中,為用戶提供一種便捷地調整智能駕駛設備位姿的方法,能夠根據用戶調整后的第三圖標,為智能駕駛設備規劃運動軌跡。在較為復雜的駕駛環境中,為用戶提供一種便捷調節智能駕駛設備位姿的方法。
31、結合第一方面,在第一方面的某些實現方式中,該第一位姿與該第二位姿指示的該智能駕駛設備的頭部朝向相反。
32、在上述技術方案中,可以實現一鍵控制智能駕駛設備在原地調頭,提高用戶遙控泊車過程中所體驗的科技感。
33、結合第一方面,在第一方面的某些實現方式中,該第一位姿指示的該智能駕駛設備的中軸線與該第二位姿指示的該智能駕駛設備的中軸線之間的夾角大于0度(degree,°)且小于180°。
34、在上述技術方案中,可以實現智能駕駛設備在原地任意角度的姿態調整,提高智能駕駛設備泊車或行駛過程中姿態調整的便捷性。
35、第二方面,提供了一種控制裝置,該裝置包括:收發單元,用于接收第一指令;第一處理單元,用于根據該第一指令控制第一界面顯示第一圖標,該第一圖標指示智能駕駛設備的目標區域的第一邊界和第二邊界;第二處理單元,用于根據該第一圖標,控制該智能駕駛設備從該第一邊界或該第二邊界行駛至該目標區域。
36、結合第二方面,在第二方面的某些實現方式中,該第二處理單元用于:在第一規劃路徑中存在障礙物時,控制該智能駕駛設備從該第一邊界行駛至該目標區域,該第一規劃路徑指示該智能駕駛設備從當前所處區域經該第二邊界行駛至該目標區域;或者,在第二規劃路徑中存在障礙物時,控制該智能駕駛設備從該第二邊界行駛至該目標區域,該第二規劃路徑指示該智能駕駛設備從該當前所處區域經該第一邊界行駛至該目標區域。
37、結合第二方面,在第二方面的某些實現方式中,該第一處理單元用于:根據該第一指令控制該第一界面的第一位置顯示該第一圖標;在該第一位置指示的實際區域存在障礙物,或者該實際區域的邊界與障礙物之間的距離小于或等于預設距離閾值時,控制該第一界面由該第一位置變更至第二位置顯示該第一圖標。
38、結合第二方面,在第二方面的某些實現方式中,該第一處理單元還用于:根據第二指令控制該第一界面顯示虛擬設備圖像,該虛擬設備圖像位于該第一界面的第三位置,該虛擬設備圖像指示該智能駕駛設備的當前所處區域;根據該第一指令和該第三位置在該第一界面的第四位置顯示該第一圖標。
39、結合第二方面,在第二方面的某些實現方式中,該第四位置與該第三位置部分重合或全部重合。
40、結合第二方面,在第二方面的某些實現方式中,該目標區域包括可泊車區域,該第一界面中還包括第二圖標,該第二圖標指示不可泊車區域,該第一處理單元用于:根據該第一指令控制該第一界面通過第一顏色顯示該第一圖標,通過第二顏色顯示該第二圖標。
41、結合第二方面,在第二方面的某些實現方式中,該第一圖標指示該智能駕駛設備在該目標區域的第一位姿,該第一處理單元用于:根據該第一指令控制該第一界面由顯示第三圖標切換為顯示該第一圖標,該第三圖標指示該智能駕駛設備在該目標區域的第二位姿。
42、結合第二方面,在第二方面的某些實現方式中,該第一位姿與該第二位姿指示的該智能駕駛設備的頭部朝向相反。
43、結合第二方面,在第二方面的某些實現方式中,該第一位姿指示的該智能駕駛設備的中軸線與該第二位姿指示的該智能駕駛設備的中軸線之間的夾角大于0°且小于180°。
44、第三方面,提供了一種控制裝置,該裝置包括:存儲器,用于存儲計算機程序;處理器,用于執行該存儲器中存儲的計算機程序,以使得該裝置執行如第一方面中任一種可能實現方式中的方法。
45、第四方面,提供了一種智能駕駛設備,該智能駕駛設備包括如第二方面或第三方面任一種可能實現方式中的裝置。
46、結合第四方面,在第四方面的某些實現方式中,該智能駕駛設備為車輛。
47、第五方面,提供了一種計算機程序產品,上述計算機程序產品包括:計算機程序代碼,當上述計算機程序代碼在計算機上運行時,使得計算機執行上述第一方面中任一種可能實現方式中的方法。
48、需要說明的是,上述計算機程序代碼可以全部或部分存儲在第一存儲介質上,其中第一存儲介質可以與處理器封裝在一起的,也可以與處理器單獨封裝。
49、第六方面,提供了一種計算機可讀介質,上述計算機可讀介質存儲有指令,當上述指令被處理器執行時,使得處理器實現上述第一方面中任一種可能實現方式中的方法。
50、第七方面,提供了一種芯片,該芯片包括電路,該電路用于執行上述第一方面中任一種可能實現方式中的方法。
- 還沒有人留言評論。精彩留言會獲得點贊!