用于折疊相機的大角度緊湊型光學圖像穩定化的制作方法
本文所公開的示例大體上涉及數字相機,并且具體地涉及利用折疊的數字相機而獲取的圖像的光學穩定化。
背景技術:
1、具有折疊光學器件的被稱為“折疊相機”的緊湊型數字相機是已知的,例如參見共同擁有的國際專利申請pct/ib2016/057366。在諸如智能電話、平板電腦等的手持移動電子設備(或簡稱為“移動設備”)中,折疊長焦(t)相機(在本文中也稱為“ftc”)通常是多相機系統的一部分并且伴隨有一個或多個附加相機,例如超寬(uw)相機和/或寬(w)相機。超寬相機具有比寬相機的視場(fovw)更大的視場(fovuw),其中fovw大于折疊長焦相機的fovt。
2、圖1a以透視圖示意性地示出了如本領域中已知的相機100。雙相機100包括ftc101和常規(或垂直)相機130。ftc?101包括:光路折疊元件(opfe)102、圖像傳感器106、和保持在鏡筒110中的透鏡(未示出)。透鏡的光軸被標記為108。opfe?102可操作用于將第一光路(op1)112折疊成第二光路(op2)114,其中op2?114基本上平行于透鏡光軸108。相機130可以是w相機或uw相機。相機130包括:保持在鏡筒134中的透鏡132,和圖像傳感器138。透鏡132的光軸被標記為136,并且被定向為平行于op1?112。在所示的x-y-z坐標軸上,op1?112被定向為平行于y軸,而op2?114被定向為平行于z軸。
3、掃描變焦相機(“sz”相機或“szc”)是已知的,參見例如共同擁有的國際專利申請pct/ib2016/057366。圖1b示意性地示出了雙相機的fov?140,其包括寬相機的fovw?142和掃描變焦相機的fovsz?144。如圖所示,fovsz?144可以在fovw?142內二維掃描(或移動),如四個箭頭所示。實現可操作用于掃描二維的szc的緊湊且成本有效的方式是沿著兩個旋轉軸旋轉(或“傾斜”)折疊的變焦相機的opfe(例如棱鏡)。然而,這引入了“視點(pov)像差”,其必須在捕獲相應的szc圖像之后被校正,例如如在共同擁有的國際專利申請pct/ib2021/056311中所詳述的。總的來說,pov像差的存在增加了雙相機的復雜性并且帶來了不完全校正的風險。
4、諸如雙相機100的現代相機通常包括光學圖像穩定化(ois),用于減輕由用戶的手部運動引起的不希望的相機運動(通常稱為握手)。對于ois,移動光學部件以減少成像對象在相機的圖像傳感器上的移動。換句話說,fov被移動,使得它在圖像傳感器上被穩定。通常,針對ois相對于透鏡和圖像傳感器(“棱鏡ois”)移動諸如opfe?102的opfe。如本領域已知的并且包括在還包括雙相機100的移動設備中的慣性測量單元(imu)可以提供移動設備的運動數據。例如,移動設備的運動數據可以是6個自由度。移動設備的運動數據可以用于提供ois。對于沿著第一(“偏航(yaw)”)方向的ois,opfe?102圍繞與op1?112平行的偏航旋轉軸112旋轉。對于沿著第二(“俯仰(pitch))方向的ois,opfe?102圍繞俯仰旋轉軸116旋轉,該俯仰旋轉軸116平行于x軸并且垂直于op1?112和op2?114兩者。為了即使在諸如相對較強的不希望的相機運動的惡劣情況下也改善諸如折疊相機101的折疊相機的圖像質量,需要分別沿著偏航方向和俯仰方向的例如±1度或更大的相對較大的fov運動。為了提供相對大的fov運動,通常需要相對大的致動器和/或大的相機模塊。
5、需要并且有利的是具有大運動棱鏡ois致動器。此外,有利的是具有包括不產生pov像差的szc的雙相機。
技術實現思路
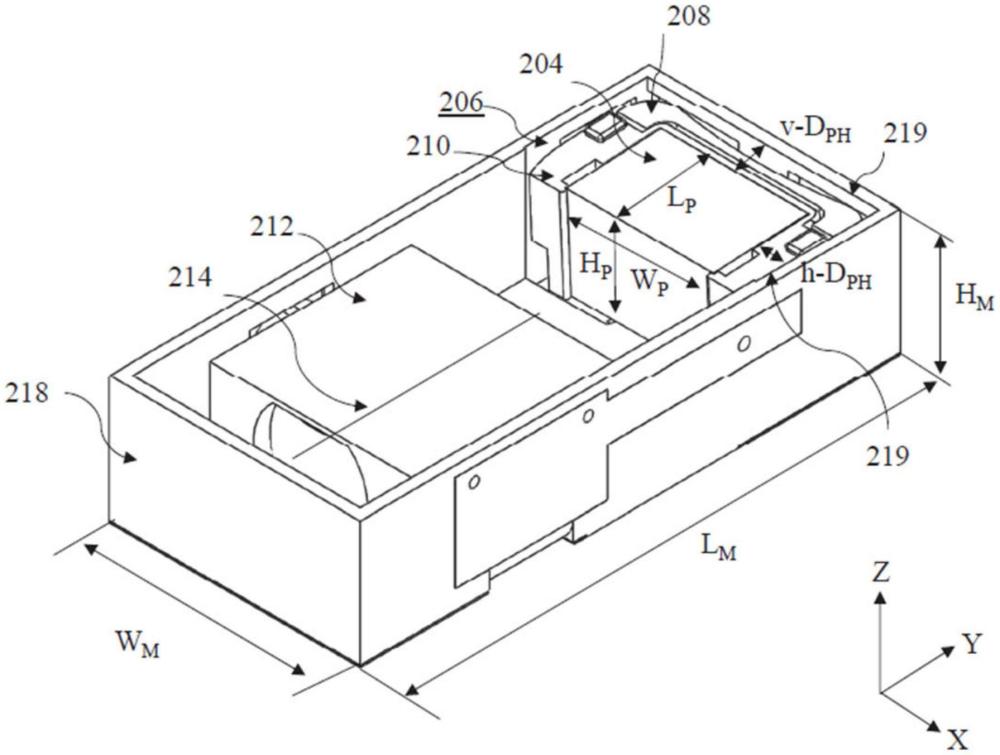
1、在各種示例性實施例中,提供了一種折疊相機模塊,包括:opfe,用于將來自第一光路的光朝向基本上垂直于第一光路的第二光路折疊;透鏡,其具有沿著第二光路的透鏡光軸,該透鏡具有在5-40mm范圍內的有效焦距efl;圖像傳感器;圍繞折疊相機模塊的模塊框架,該模塊框架具有指向opfe的內壁、沿著平行于第一光路的方向所測量的模塊高度hm、沿著平行于第二光路的方向所測量的模塊長度lm以及沿著垂直于第一光路和第二光路二者的方向所測量的模塊寬度wm;包括單個音圈馬達(vcm)的opfe致動器,該單個音圈馬達(vcm)用于使opfe圍繞第一旋轉軸和圍繞垂直于第一旋轉軸的第二旋轉軸旋轉,以分別圍繞第一ois方向和第二ois方向執行ois,其中,ois圍繞第一ois方向和第二ois方向中的每一個大于±1度,其中,在沿著平行于第二光路的方向所測量的在極限旋轉opfe位置的opfe與模塊框架的內壁之間的最小距離ymin滿足ymin≤2mm,其中ymin/lm≤0.075,其中在沿著垂直于第一光路和第二光路兩者的方向所測量的在極限旋轉opfe位置的opfe與模塊框架的內壁之間的最小距離xmin滿足xmin≤3mm,并且其中xmin/wm≤0.25。
2、在一些示例中,opfe圍繞第一旋轉軸的旋轉使用三個支撐位置。
3、在一些示例中,第一旋轉軸位于還包括opfe的區域內。
4、在一些示例中,第二旋轉軸位于還包括opfe的區域內。
5、在一些示例中,ymin/lm≤0.05。在一些示例中,xmin/wm≤0.2。在一些示例中,xmin≤2.75mm并且ymin≤1.75mm。在一些示例中,xmin≤2.5mm并且ymin≤1.5mm。在一些示例中,xmin≤2.25mm并且ymin≤1.25mm。
6、在一些示例中,ois可以圍繞第一ois方向和第二ois方向中的每一個大于±2度。在一些示例中,ois可以圍繞第一ois方向和第二ois方向中的每一個大于±3度。在一些示例中,ois可以圍繞第一ois方向和第二ois方向中的每一個大于±4度。在一些示例中,ois可以圍繞第一ois方向和第二ois方向中的每一個大于±5度。
7、在一些示例中,opfe是棱鏡。
8、在一些示例中,wm可以在7.5-15mm的范圍內并且lm可以在15-30mm的范圍內。在一些示例中,hm可以在4-15mm的范圍內。在一些示例中,hm可以在5-10mm的范圍內。
9、在一些示例中,opfe具有沿著平行于第一光路的方向所測量的opfe高度hp和沿著垂直于第一光路和第二光路二者的方向所測量的opfe寬度wp,其中在零旋轉opfe位置,opfe遠離模塊框架的內壁而位于水平距離h-dph和垂直距離v-dph處,并且其中wp/h-dph>1.75并且hp/v-dph>1.75。
10、在一些示例中,wp/h-dph>2并且hp/v-dph>2。在一些示例中,wp/h-dph>2.5并且hp/v-dph>2.5。在一些示例中,wp/h-dph>3并且hp/v-dph>3。在一些示例中,wp/h-dph>3.25并且hp/v-dph>3.25。
11、在一些示例中,hm<hp+4mm。在一些示例中,hm<hp+2.5mm。
12、在一些示例中,比例hp/hm可以在0.7-0.8的范圍內。
13、在一些示例中,wp可以在3-20mm的范圍內。
14、在一些示例中,efl可以在10-25mm的范圍內。
15、在一些示例中,opfe致動器包括偏航級、俯仰級和框架,并且,所述偏航級、所述俯仰級和所述框架相對于彼此移動。在一些示例中,俯仰級與偏航級一起移動。
16、在一些示例中,偏航級包括兩個磁體,并且框架包括兩個線圈:第一線圈和第二線圈。在一些示例中,框架和模塊框架由一個部分制成。在一些示例中,偏航級包括位置感測單元,所述位置感測單元包括一個或一個以上磁體。在一些示例中,俯仰級包括位置感測單元,所述位置感測單元包括兩個或更多個磁體。在一些示例中,偏航級、俯仰級和框架之間的相對運動由多個球軸承實現。
17、在一些示例中,為了使opfe圍繞第二旋轉軸旋轉,第一線圈中的電流在與第二線圈中的電流相同的方向流動。在一些示例中,為了使opfe圍繞第一旋轉軸旋轉,第一線圈中的電流在與第二線圈中的電流相反的方向流動。
18、在一些示例中,折疊相機模塊可以被包括在移動設備中。在一些示例中,移動設備還包括寬相機,所述寬相機具有大于fovt的寬相機視場fovw。在一些示例中,移動設備還包括imu。在一些示例中,移動設備可以是智能電話。在一些示例中,移動設備可以是平板電腦。
- 還沒有人留言評論。精彩留言會獲得點贊!