一種用于AR光波導雙目模組的雙目合像方法與流程
本發明涉及ar,具體涉及一種用于ar光波導雙目模組的雙目合像方法。
背景技術:
1、增強現實(augmented?reality,ar)是一種將現實世界信息和虛擬世界信息疊加后通過透明或半透明的顯示裝置投射至人眼的技術。由于ar技術能夠對真實環境信息進行增強輸出,其在軍工、三維建模、實時跟蹤、醫療技術等方面具有廣泛的應用。目前的ar技術根據設計方式的不同,可以分為衍射光學類光波導和幾何光學類光波導。一般情況下,ar光波導以雙目模組的形式應用在頭盔上或者智能眼鏡上。
2、ar光波導雙目模組在使用時若出現人眼雙目觀看的像不一致時,使用者眼前則會出現重影、亮暗程度不一致的畫面,嚴重時會引起人體生理不適反應,如眩暈、嘔吐等現象。ar光波導模組的雙目合像難點:一是微型光引擎和光波導引入的機械誤差,難以通過人手精準調節位置偏差、角度偏差;二是人眼本身具有自我調焦功能,當人眼作為雙目合像的評估工具時,會引入人眼自身的誤差。合像者在合像時間較長時,合像者的雙目會出現不同位置的像合在一起的錯覺,導致使用者看到的為出現重影的像,而合像者看到的為合好的唯一的像。針對這些問題,許多專利提出了相應的解決方法。如用機械代替人手,用相機代替人眼,系統性調節雙目模組,這種方式可以有效解決問題,但機械為多軸調節,效率較低,雙目使用相機替代,成本較高;也有專利提出用單相機的方法來減少雙相機的誤差及成本,但是效果一般。
技術實現思路
1、為解決上述技術缺陷,本發明的目的是提供一種用于ar光波導雙目模組的雙目合像方法,這種方法分別將雙側鏡片和雙側光引擎作為一個整體,優先將光機組進行雙側合像,后續再將鏡片組與光機組進行拼接,該不僅可以減少雙目合像過程中的調節變量,有效降低合像裝置的搭建成本,而且可以根據鏡片的光學設計適當調節成像角度。
2、為達到上述目的,本發明采用的技術方案是:一種用于ar光波導雙目模組的雙目合像方法,ar光波導雙目模組包括光機組和鏡片組,光機組為左右雙側光引擎,鏡片組提供左右雙側光波導鏡片,該ar光波導雙目模組在裝配時,先將雙側光引擎調整好位置和角度,之后將雙側光引擎當作一個整體,雙側光波導鏡片當作一個整體,最后將雙側光波導鏡片整體進行裝配;為了ar光波導雙目模組實現雙目合像目標的總視場角值,雙側光引擎的光按照一定視場角出射,且在特定位置中雙引側光引擎在相機中呈現大小、位置及角度均相同的像,以確定光引擎已完成入射到光波導鏡片前的調節;具體步驟如下:
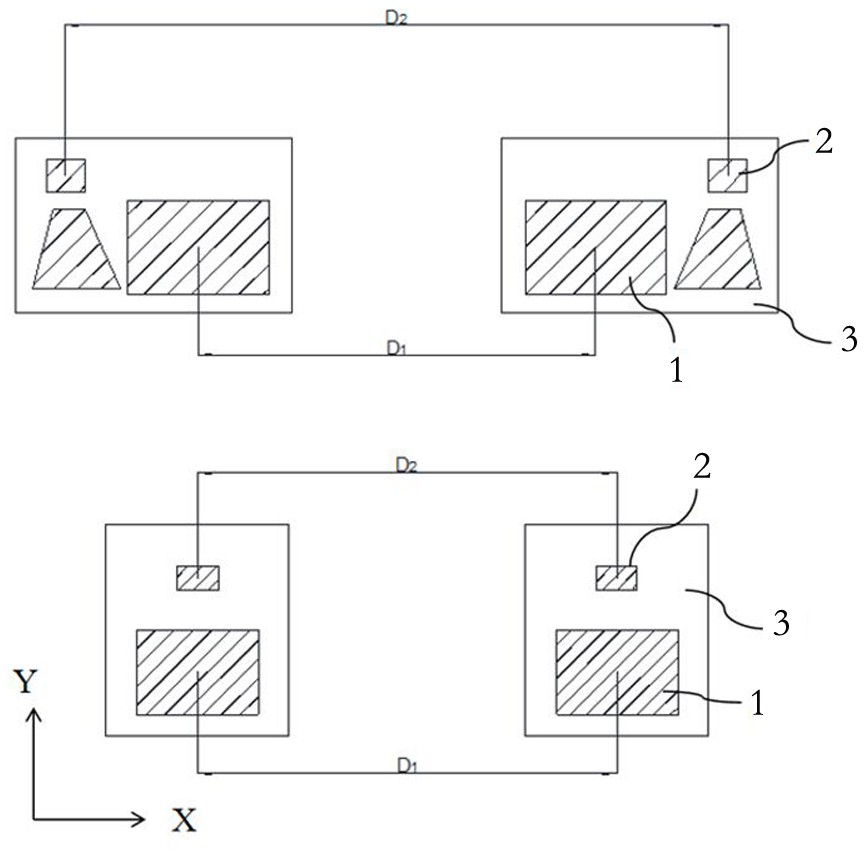
3、1)選取兩片衍射光波導鏡片,按照人眼的瞳距值分開兩側設置,兩側光波導鏡片均包含耦出光柵區域和耦入光柵區域,其中兩側光波導鏡片的耦出光柵距離與人眼的瞳距值相等,由于耦出光柵位置確定,通過測量得出兩側光波導鏡片的耦入光柵距離;
4、2)設定任一光波導鏡片的出瞳距離(eye-relief)為h,眼動范圍(eyebox)為x0×y0,耦出光柵區域為x1×y1,則光波導鏡片橫向視場角(hfov)為2tan-1[(x1-x0)/2h],縱向視場角(vfov)為2tan-1[(y1-y0)/2h];
5、當光引擎的橫向視場角(h’fov)大于hfov,光引擎的縱向視場角(v’fov)大于vfov時,ar光波導雙目模組呈現大小為hfov×vfov的總視場,視場方向與位置取決于光引擎和光波導鏡片的相對位置及角度;當h’fov小于hfov,v’fov小于vfov時,ar光波導雙目模組呈現大小為h’fov×v’fov的總視場;
6、所述ar光波導雙目模組在進行二維圖像合像時,光引擎有一定的角度范圍可以進行偏轉;在x-z平面,當左、右兩側光引擎的偏轉角度為0°時,兩側光引擎的合像總視場角xfov與單側光引擎的總視場大小保持一致;當左、右兩側光引擎的偏轉角度為α時,兩側光引擎的合像總視場角x’fov=xfov,與單側光引擎的總視場大小保持一致;
7、由光波導的性質可知,在eyebox的范圍內,均可以設置人眼觀看的位置。通過設置合適的人眼觀看位置,確定左、右光引擎入射的相對位置,調節光機的偏轉角度,可以達到雙目合視場效果最佳化;在x-z平面,光引擎偏轉角α需要滿足條件α≤[tan-1(x1/h)-hfov/2];同理,在y-z平面,偏轉角需小于等于[tan-1(y1/h)-vfov/2];
8、3)根據前面計算確定左、右兩側光引擎的相對位置后,光引擎的出瞳距離為l,與左側光引擎距離為l的位置放置左側相機,與右側光引擎距離為l的位置放置右側相機,各相機的中心對準各自光引擎出瞳的中心,左右兩側光引擎的距離與步驟1)中兩耦入光柵的距離一致;設定各光引擎的出瞳大小為x2?mm×y2mm,在對應相機中探測到的成像大小為x3mm×y3?mm;
9、當左、右光引擎的偏轉角度為0°,則根據幾何關系可以得知,x3=x2+2l·tan(h′fov/2),y3=y2+2l·tan(v′fov/2);若相機的像素大小為βmm,則可算出光引擎成像在相機中的像素個數(x3/β)×(y3/β);
10、當左、右兩側光引擎所成像均位于相機的中心,且在相機面元的位置保持一致時,則可確定兩側光引擎的合像已完成;
11、當左、右光引擎的偏轉角度不為0°時,此時設定光引擎在x-z面的偏轉角度為α,在y-z面光引擎偏轉角度為0°,根據幾何關系可以得出:
12、x3=x2+l·[tan(h′fov/2-α)+tan(h′fov/2+α)],y3=y2+2l·tan(v′fov/2),此時,當左、右兩側光引擎所成像沒有位于相機的中心,而是偏離相機中心一定距離;只要確保左、右兩側光引擎所成的像在相機面元的位置保持一致時,則可確定兩側光引擎的合像已完成;合像過程中,光引擎偏轉一定角度對于某些鏡片有較好的效果,在光波導鏡片的光學設計中,某個固定的人眼觀看位置,光引擎偏轉角度為0°時,光波導鏡片一側的視場角亮度較暗,在這種情況下,可以在此入眼位置使光引擎偏轉不同的角度,以使最終雙目ar眼鏡模組達到較好的亮度效果;
13、4)當左、右兩側光引擎完成合像時,使用合適的固定手段將兩側光引擎按照最終合像的相對位置進行固定;兩側光波導鏡片按照步驟1)中所描述的兩耦入光柵的距離,用相應的結構件粘黏為一個完整的組件,即為鏡片組,同時保證左、右兩側光波導鏡片在x-y面為平行的面;為此,所述鏡片組包括固定兩側鏡片的第一結構件,該結構件保證了左、右兩側光波導鏡片的相對位置,兩側光波導鏡片上均顯示有耦入光柵區域和耦出光柵區域;
14、5)將固定完畢的鏡片組與光機組拼接在一起;拼接時,兩側光引擎底部通過第二結構件固定在一起,組成光機組,兩側光引擎分別對應各鏡片耦入光柵區域拼接;這種方法可以將合像的變量控制在光機組中兩光機的相對位置因素;光機組和鏡片組在進行拼接時,光機組即使與鏡片之間有一定角度,左右兩側的光引擎對應各自光波導鏡片是同種角度變化,不影響最終的合像效果,能較為有效的控制ar鏡片模組雙目合像中的多變量位置關系。
15、傳統意義上的ar光波導雙目模組一般由光引擎和鏡片組成,部分體積較大的光引擎會引入反射三角棱鏡對光路進行轉折。一般情況下,光機組在點亮時,左、右兩側光引擎會呈現視場角、顏色、像差一致的圖案。在裝配雙目ar眼鏡模組時,一般先將鏡片、光引擎、反射三角棱鏡放置在相應的位置上,相機在ar眼鏡模組的出瞳位置拍攝像,通過調節光機的角度和位置,最終實現ar眼鏡模組的雙目合像。用這種方法進行雙目合像,會引入單側光引擎與單側光波導鏡片的相對方位關系,雙側光引擎的相對方位關系,若光路設計中增加了反射三角棱鏡,則會增加更多的相對方位關系,這無疑在雙目合像中引入了繁瑣的相對位置關系,給雙目合像調節增加了許多變量因素。同時,在這種方法下完成的合像,無法評估最終的雙目總視場角成像位置,成像位置存在隨機性。
16、通過本發明提出的雙目合像方法,分別將雙側光引擎當成一個整體,雙側光波導鏡片當成一個整體,預先將雙側光引擎調整好位置和角度,最后再將鏡片整體進行裝配,這樣可以減少調節過程中光路傳輸的變量。為了使ar眼鏡模組實現雙目合像目標總視場角值,雙側光引擎的光需按照一定視場角出射,且在特定位置中,兩側光引擎在相機中呈現相同大小、位置、角度的像,以確定光引擎已完成入射到鏡片前的調節,此種方法不僅可以減少雙目合像過程中的調節變量,有效降低合像裝置的搭建成本,而且可以根據鏡片的光學設計適當調節成像角度。
- 還沒有人留言評論。精彩留言會獲得點贊!