一種具有大姿態角的六自由度并聯機器人及其控制方法
本發明涉及大姿態角并聯機器人,具體是一種具有大姿態角的六自由度并聯機器人及其控制方法。
背景技術:
1、并聯機器人具有剛度大、承載能力強、慣性小、動態響應好、無累計誤差等諸多優點,在大型調姿平臺、精密光機結構和機械加工等領域有著廣泛的應用。并聯機器人通常由動平臺、定平臺和連接在兩者之間的若干支鏈組成,選擇各支鏈中的某一環節作為驅動關節,驅動關節數量與并聯機器人機構自由度數量相當。對于六自由度并聯機器人而言,其支鏈數量較多,動平臺的大幅度運動會造成支鏈之間干涉,致使六自由度并聯機器人活動空間和姿態調整范圍受限。此外,由于并聯機器人各支鏈間強耦合,在工作空間內存在很多奇異點,為了避開它們會導致并聯機器人工作路線不連續,降低機器人作業能力。
2、目前,隨著工業水平的不斷發展,對特殊零件的加工需求不斷增加,并聯機器人在機械加工領域的潛力需要進一步挖掘,六自由度并聯機器人工作范圍和姿態調整范圍小、工作空間內奇異點多等問題亟待解決。通過對虎克鉸和球副的重新設計和并聯機器人支鏈的合理配置,可以在一定程度上保證可觀的工作空間,同時增加并聯機器人姿態調整幅度。對于并聯機器人工作空間內奇異點多的問題,可以通過冗余自由度的形式避開期望工作路徑中的奇異形位,或者通過冗余驅動的方式消除并聯機器人的奇異點。
3、例如,申請人在先申請的申請號202310694440.0、申請日2023年6月12日、名稱為一種4pus-3ups冗余驅動并聯機器人的中國發明專利,其支鏈包括四條pus支鏈和三條ups支鏈,通過對虎克鉸和球副重新設計,使動平臺可以實現大角度的姿態調整,并提出通過冗余驅動的方式消除工作空間中的奇異點。但該方案中所提出的關節布局在部分位姿下存在失穩性奇異,這種奇異是無法通過其所提出的冗余驅動方式規避的,而且該專利也并未提出具體適用于所提出并聯機器人的冗余驅動控制策略。
4、有鑒于此,亟需對具有大姿態角的六自由度并聯機器人做進一步優化設計,同時提出其控制方法,以解決失穩性奇異問題對并聯機器人造成的不利影響。
技術實現思路
1、為解決背景技術存在的不足,本發明提供一種具有大姿態角的六自由度并聯機器人及其控制方法,其通過優化并聯機器人鉸鏈間的幾何關系,消除姿態變化過程中的失穩性奇異,利用常態組支鏈與輪換組支鏈不同控制策略的配合,在保證動平臺位姿精度的同時,還可以干預調節各支鏈驅動關節的驅動力,使動平臺能夠連續的進行大角度姿態調整。
2、為實現上述目的,本發明采取下述技術方案:
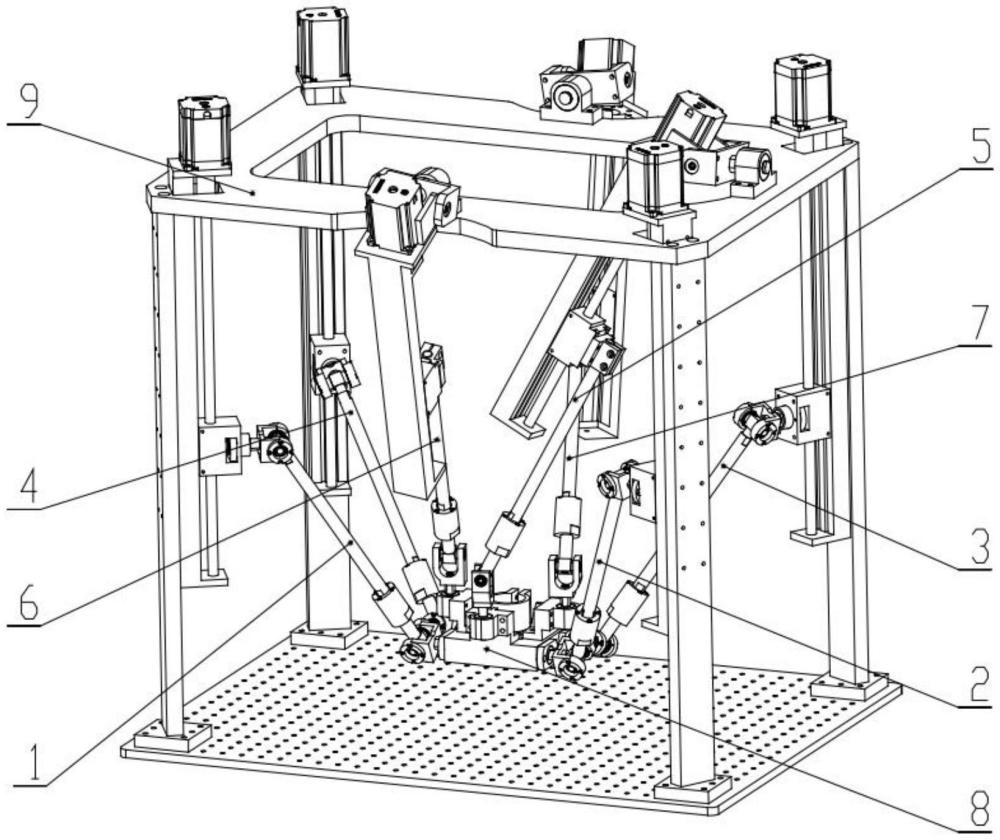
3、一種具有大姿態角的六自由度并聯機器人,包括固定框架以及設置在其內側的動平臺,所述動平臺與所述固定框架之間通過七條支鏈連接,包括四條pus支鏈和三條ups支鏈,其特征在于:所述四條pus支鏈均采用豎向直線運動模組并分別安裝在固定框架四角頂部位置,所述三條ups支鏈均采用斜向直線運動模組并分別安裝在固定框架頂部與動平臺之間,所述豎向直線運動模組和所述斜向直線運動模組均移動設置有驅動關節,七條支鏈的驅動關節分別通過連桿與動平臺進行連接;
4、豎向直線運動模組均與固定框架固定設置,其驅動關節與連桿的上端之間通過e型虎克鉸進行連接,連桿的下端與動平臺之間通過e型球副進行連接;
5、斜向直線運動模組的上端與固定框架之間通過h型虎克鉸進行連接,斜向直線運動模組的驅動關節與連桿的上端固定連接,連桿的下端與動平臺之間通過u型球副進行連接,且連桿處于h型虎克鉸與u型球副的回轉中心連線上;
6、初始狀態下,動平臺處于水平位置,四個e型虎克鉸的回轉中心在水平投影上按照等腰梯形的四個端點排布,三個h型虎克鉸的回轉中心在水平投影上按照等腰直角三角形的三個端點排布,h型虎克鉸回轉中心所在等腰直角三角形的斜邊與e型虎克鉸回轉中心所在等腰梯形的中心線在俯視角度重合設置,且h型虎克鉸回轉中心所在等腰直角三角形的斜邊中點位于動平臺的軸線上;四個e型球副的回轉中心在水平投影上按照矩形的四個端點排布設置在動平臺兩端,三個u型球副的回轉中心在水平投影上按照等腰直角三角形的三個端點排布設置在動平臺表面邊緣,u型球副回轉中心所在等腰直角三角形的斜邊與h型虎克鉸回轉中心所在等腰直角三角形的斜邊在俯視角度垂直設置,且u型球副回轉中心所在等腰直角三角形的斜邊中點位于動平臺的軸線上。
7、進一步的,所述豎向直線運動模組和所述斜向直線運動模組均采用滾珠絲杠作為執行機構并搭配移動副作為驅動關節。
8、一種具有大姿態角的六自由度并聯機器人的控制方法,包括以下步驟:
9、對七條支鏈進行編號為1#pus支鏈、2#pus支鏈、3#pus支鏈、4#pus支鏈以及5#ups支鏈、6#ups支鏈、7#ups支鏈,其中,5#ups支鏈的h型虎克鉸和u型球副分別布置在對應等腰直角三角形直角所在的頂點處,而6#ups支鏈和7#ups支鏈為中心對稱結構,將七條支鏈分為兩組,包括常態組支鏈與輪換組支鏈,常態組支鏈由1#pus支鏈、2#pus支鏈、3#pus支鏈、4#pus支鏈和5#ups支鏈組成,輪換組支鏈由6#ups支鏈和7#ups支鏈組成;
10、首先定義參考坐標系和運動坐標系,參考坐標系oa-xayaza位于三條ups支鏈中h型虎克鉸回轉中心所在平面下方,原點oa重合于四條pus支鏈的e型虎克鉸的回轉中心所在等腰梯形中位線與下底垂直平分線的交點,ya軸水平向左,za軸豎直向下,運動坐標系ob-xbybzb的原點oa位于四條pus支鏈中e型球副回轉中心所在圓的圓心,yb軸垂直于動平臺左側表面,zb軸豎直向下,xa軸和xb軸均符合右手定則;
11、動平臺在工作空間中的位姿用運動坐標系在參考坐標系中的位姿描述,表示為(xo,yo,zo),姿態約定為x-y-z歐拉角,表示為(αb,βb,γb),則動平臺的空間運動廣義位姿坐標表示為x=[xo?yo?zoαbβbγb]t;
12、將所述輪換組支鏈通過輪換條件選擇一個驅動關節采用滑模控制器進行驅動力控制,輪換組支鏈的另一個驅動關節與所述常態組支鏈的全部驅動關節根據動力學模型進行位置控制,所述輪換條件約定為比較速度雅可比矩陣j6和j7的條件數大小,若j6的條件數小則6#ups支鏈的驅動關節進行驅動力控制,若j7的條件數小則7#ups支鏈的驅動關節進行驅動力控制;
13、定義速度雅可比矩陣j6和j7如下:
14、j6=[jh1?jh2?jh3?jh4?jh5?jh6]wv
15、j7=[jh1?jh2?jh3?jh4?jh5?jh7]wv
16、式中,jhm?m=1,2,...,6,7表示各驅動關節的速度雅可比矩陣,wv為可變加權矩陣,表示如下:
17、
18、其中,e3×3是3×3的單位矩陣,o3×3是3×3的零矩陣,lv為速度雅可比矩陣對應動平臺移動速度分量矢量模的方均根,lω為速度雅可比矩陣對應動平臺轉動角速度分量矢量模的方均根,計算如下:
19、
20、式中,n表示速度雅可比矩陣j6和j7中jhm的第n項子項;
21、定義包含j6和j7的總速度雅可比矩陣ja∈r6×7以及驅動力矩陣τ∈r7×1如下:
22、
23、τ=[τ1τ2τ3τ4τ5τ6τ7]t
24、則動力學模型如下:
25、
26、采用廣義逆的方法,獲得動力學模型的最小二范數解,定義ja的廣義右偽逆矩陣進而獲得動力學模型的最小二范數解:
27、
28、式中,a∈r6×6表示加速度項系數矩陣,c∈r6×6表示速度項系數矩陣,q∈r6×6表示重力項系數矩陣,e3是3階單位矩陣,o3是3階零矩陣,[f?m]t∈r6×1表示外界負載施加于動平臺上的外力;
29、將建立的動力學模型從工作空間轉換到關節空間,定義關節空間速度坐標其含有七個元素,分別對應七個驅動關節的笛卡爾坐標移動速度,則動平臺的空間運動廣義速度坐標與關節空間速度坐標間速度映射關系表達式如下:
30、
31、式中,j=[jh1?jh2?jh3?jh4?jh5?jh6?jh7];
32、對其進行求解,定義j的廣義左偽逆矩陣j+=(jtj)-1jt,則映射關系轉換為:
33、
34、對等式兩邊求導得:
35、
36、其中,
37、代入動力學模型并且不考慮外界負載的情況下,得到:
38、
39、通過對上式兩邊同時乘以ja的廣義右偽逆矩陣ja+求解得到關節空間描述的動力學模型:
40、
41、式中,
42、考慮到動力學模型建模誤差以及外界干擾,將二者綜合為誤差項d∈r7×1,將誤差項添加到上式中,得到:
43、
44、設關節空間位置跟蹤誤差為e∈r7×1,關節空間速度跟蹤誤差為
45、e=qd-q
46、
47、其中,
48、qd=[q1d?q2d?q3d?q4d?q5d?q6d?q7d]t
49、
50、式中,qmd?m=1,2,...,6,7表示各驅動關節的期望位置;
51、設計非奇異終端快速滑模面為:
52、
53、其中,系數矩陣λ=diag(λ1,λ2,λ3,λ4,λ5,λ6,λ7)且λm>0,a和b是正奇數,b>a,且
54、對滑模面求導得:
55、
56、設基于指數的滑膜趨近率為:
57、
58、最終,采用基于上界的滑模控制方法,設計滑模控制器如下:
59、
60、式中,sgn(s)為符號函數,ε>0,k>0。
61、進一步的,所述滑模控制器中采用雙曲正切函數tanh(sη)代替符號函數sgn(s)。
62、與現有技術相比,本發明的有益效果是:
63、本發明的六自由度并聯機器人將虎克鉸和球副的回轉中心的空間布局設計為非單一縮放關系,消除了并聯機器人在工作空間內的部分失穩性奇異形位,具有七個驅動支鏈,為冗余驅動,所提供的控制方法將常態組支鏈與輪換組支鏈采用不同的控制策略,是典型力位混合驅動邏輯,在保證運動控制精度的同時還可以干預各驅動關節驅動力的分配,使驅動力的分配更加均勻,可以保證在工作空間內大姿態角的連續調整變化,且沒有需要避讓的奇異形位。
- 還沒有人留言評論。精彩留言會獲得點贊!