一種機器人訓練保護用天軌設備的制作方法
本發明涉及機器人研發輔助設備的,具體涉及一種機器人訓練保護用天軌設備。
背景技術:
1、足式機器人是當今機器人研究領域最為前沿的研究開發方向,其集機械、電子、計算機、材料、傳感器、控制技術及人工智能等多門學科于一體,包括有雙足機器人,四足機器人或機器狗,以及六足機器人等。其中,足式機器人的腿部站立穩定與否決定著整個機器人運行環境的穩定安全與否,故而對于足式機器人的腿部行走訓練為機器人訓練學習的重要奠基項目,并且機器人最好在環境復雜的條件下訓練學習,使得其具有一定避障和越障能力,但是在足式機器人訓練學習過程中存在著很大的傾倒風險,特別是對于重心較高的雙足機器人,一旦發生傾倒,通常會伴隨多個部位以及電子元器件的摔壞損傷,不僅需要更換零部件,是大量經濟成本的損失;而且需要重新組裝配合調式,以及重新訓練學習,更是大量時間成本的損失。
2、故而,需要在足式機器人訓練過程中做好足夠的防護,極力避免機器人傾倒的發生。現有技術中,公告號為c?cn?106625778?a?的專利文獻公開了了一種足式仿生機器人運動控制測試平臺及測試方法,包括坡道路面模擬平臺、支撐保護機構和底臺;坡道路面模擬平臺、支撐保護機構均設置在底臺上;坡道路面模擬平臺包括方柱、氣缸、電機、傳動帶和滾輪;兩個平行的方柱之間垂直設置有若干個滾輪柱,滾輪柱相互平行,方柱兩個端頭部位的滾輪柱上均設置有電機,電機安裝在滾輪柱的端頭;兩個方柱的下方均設置有若干氣缸;若干個滾輪柱外側包裹有傳動帶,傳動帶能夠在滾輪柱的外側循環轉動。上述技術方案測試平臺雖然能夠模擬外部坡度路面,并在機器人行走訓練過程中提供一定的防傾倒保障,但是不能模擬其他的障礙路面,局限性很大,并且其防傾倒設備過于呆板,嚴重影響了機器人行走訓練的受力狀態,導致訓練收集數據部準確,且特別不適用于本身不具備平衡性的雙足機器人。
技術實現思路
1、本發明為彌補現有機器人研發輔助設備技術方面的不足,提出一種結構簡單,便于組建在各種模擬障礙路面或者真實障礙路面上,并且避免了防傾倒設備影響了機器人行走訓練的受力狀態,且能夠避免機器人出現傾倒損傷,即使在電子設備故障的狀況下也能及時保障機器人安全的機器人訓練保護用天軌設備。
2、具體技術方案如下:
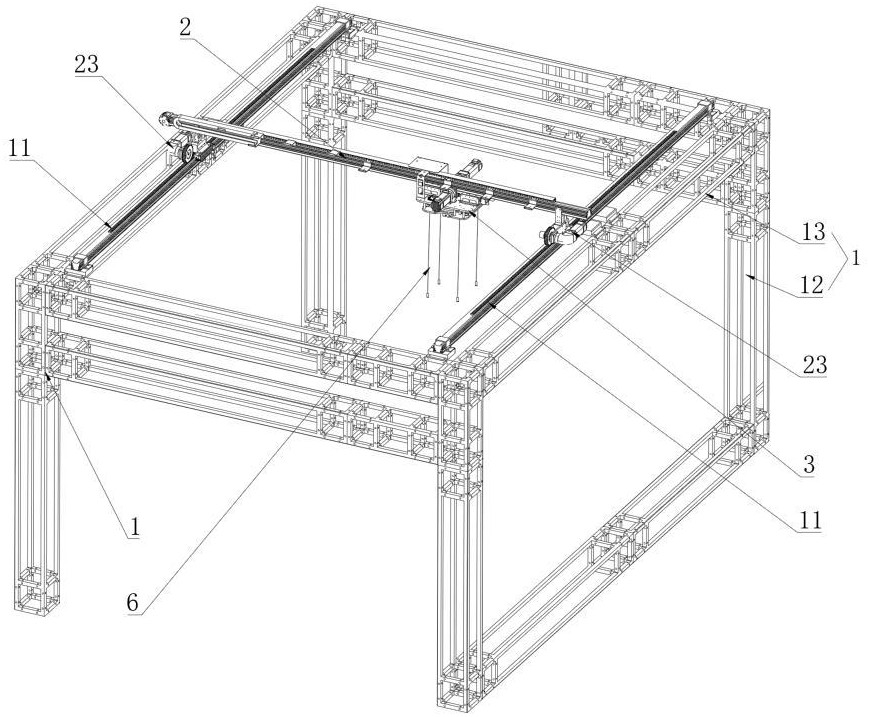
3、一種機器人訓練保護用天軌設備,包括有支撐框架體結構和天軌橫架結構,所述天軌橫架結構兩端部可移動安裝在支撐框架體結構頂部,在所述天軌橫架結構上可移動安裝有天軌滑動車架結構,在所述天軌滑動車架結構上安裝有旋轉驅動機構和輪盤結構,所述旋轉驅動機構用于控制輪盤結構轉動,在所述輪盤結構上設置有吊裝組件結構,用于吊裝機器人,所述旋轉驅動機構或輪盤結構還連接有高度測定編碼器和失電制動器;
4、在所述天軌滑動車架結構上安裝有x軸移動驅動機構和x軸位置測定編碼器,在所述天軌橫架結構兩端部還安裝有y軸移動驅動機構和y軸位置測定編碼器。
5、作為優選:在所述支撐框架體結構頂部兩側設置有滑軌結構,在所述天軌橫架結構兩端部均設置有支撐架,在所述支撐架底部安裝有y軸滑動塊,所述y軸滑動塊分別與滑軌結構滑動配合,所述y軸移動驅動機構和y軸位置測定編碼器均安裝在該支撐架上;
6、所述天軌滑動車架結構包括有安裝支撐板架,在所述安裝支撐板架頂部設置有x軸滑動塊,所述x軸滑動塊與天軌橫架結構底部滑動配合,所述x軸移動驅動機構和x軸位置測定編碼器均安裝在安裝支撐板架頂部,且所述旋轉驅動機構和輪盤結構均安裝在安裝支撐板架中。
7、作為優選:所述y軸移動驅動機構包括有y軸驅動電機和y軸驅動輪,所述y軸驅動電機通過減速傳動機構與y軸驅動輪傳動連接,所述y軸驅動輪作用在滑軌結構上;
8、所述x軸移動驅動機構包括有x軸驅動電機和x軸驅動輪,所述x軸驅動電機通過減速傳動機構與x軸驅動輪傳動連接,所述x軸驅動輪作用在安裝支撐板架上。
9、作為優選:所述x軸驅動輪和/或y軸驅動輪為同步帶輪結構或齒輪結構,在所述天軌橫架結構和/或滑軌結構上設置與同步帶輪結構或齒輪結構相配合的同步帶或齒條結構。
10、作為優選:在所述安裝支撐板架中還安裝有位置傳感器、攝像頭機構和/或圖像傳感器,所述x軸位置測定編碼器和y軸位置測定編碼器分別與x軸移動驅動機構和y軸移動驅動機構輸出軸連接。
11、作為優選:所述支撐框架體結構包括有四個豎向立架和水平方框架,四個豎向立架分別設置在水平方框架四個角部,所述滑軌結構分別設在水平方框架兩個長邊位置。
12、作為優選:所述輪盤結構包括有帶輪盤和至少一個導向輪組件,所述帶輪盤轉動安裝在安裝支撐板架上,所述導向輪組件安裝在安裝支撐板架上,且導向輪組件對準所述帶輪盤設置,在所述安裝支撐板架中設置有帶輪盤安裝軸套,所述帶輪盤轉動安裝在帶輪盤安裝軸套外表面。
13、作為優選:所述帶輪盤由從動帶輪部和線槽盤部組成,所述導向輪組件對準線槽盤部設置;
14、所述旋轉驅動機構包括有驅動電機、主動帶輪和傳動帶,所述主動帶輪連接在驅動電機輸出端,所述傳動帶套設在主動帶輪與從動帶輪部之間,且在所述主動帶輪上安裝有剎車軸結構,所述失電制動器和高度測定編碼器分別與該剎車軸結構連接。
15、作為優選:在所述帶輪盤外圈設置有線槽部,在所述帶輪盤內圈安裝有交叉滾子軸承,所述交叉滾子軸承內圈固定安裝在帶輪盤安裝軸套外表面,所述交叉滾子軸承外圈與帶輪盤內圈過盈配合,且在所述帶輪盤上側部或交叉滾子軸承外圈上側部固定設置有驅動齒圈;
16、所述旋轉驅動機構包括有驅動電機和齒輪軸傳動組件,所述驅動電機通過齒輪軸傳動組件與驅動齒圈傳動連接,在所述帶輪盤下側部或交叉滾子軸承外圈下側部通過連接件連接有剎車軸結構,所述失電制動器和高度測定編碼器分別與該剎車軸結構連接,所述剎車軸結構豎直設立在帶輪盤安裝軸套內側中心,所述失電制動器和高度測定編碼器安裝在帶輪盤安裝軸套內側。
17、作為優選:所述吊裝組件結構由四根吊索組成,所述輪盤結構包括有四個導向輪組件,四根吊索分別與四個導向輪組件配合;且在所述安裝支撐板架頂部設置有來兩塊x軸滑動塊,所述x軸移動驅動機構輸出端位于兩塊x軸滑動塊之間。
18、本發明的有益效果為:設置有支撐框架體結構便于穩定組建在各種模擬障礙路面或者真實障礙路面上,以達到真實還原真實場景的訓練目的,并且設置有滑動車架結構在x軸驅動電機與y軸驅動電機的驅動控制下跟隨機器人移動,并通過吊裝組件結構提供機器人防傾倒保護,而吊裝組件結構并一般狀況下不會對機器人施加力的作用,不會影響機器人行走訓練的受力狀態;在電子設備故障的狀況下,通過失電制動器控制剎車軸結構停止轉動,從而能夠及時制動驅動電機機構輸出軸,避免機器人癱倒在地的風險;設置高度測定編碼器通過驅動電機機構輸出軸轉動計算吊裝組件結構的高度和伸展速度,若異常能夠及時地反饋制動,提供機器人故障落地前的最后保障反饋防護,避免其他位置傳感器、攝像頭機構和/或圖像傳感器分析出現故障之時,依然能夠對機器人提供足夠的安全防護,避免造成較大損失和機器或人員損傷。
- 還沒有人留言評論。精彩留言會獲得點贊!