一種關節驅動裝置及其控制方法與流程
本技術屬于關節驅動,更具體地說,是涉及一種關節驅動裝置及其控制方法。
背景技術:
1、拮抗驅動方式在關節驅動結構中普遍存在,具有零機械間隙、變剛度控制、抗沖擊性強等諸多優點。拮抗驅動的關節驅動裝置通常涉及兩個或以上驅動器。例如,應用在手指、手臂等關節上的拮抗驅動方式,主要由兩個驅動器通過傳動腱來驅動關節的正反運動,每個驅動器可提供單個方向的驅動力。
2、其中一些利用拮抗驅動的機器人關節,正反運動兩個方向的驅動力相對較為對稱,比如具有左右擺動自由度的手腕關節,我們可以稱這類關節為對稱式拮抗驅動關節。
3、對于上述類型的關節,為滿足較大負載的要求,通常需要兩個較大功率的驅動器。較大功率的驅動力意味著驅動器的體積也會較大,且通常導致較昂貴、需要占據更大的物理空間。
技術實現思路
1、本技術實施例的目的在于提供一種關節驅動裝置及其控制方法,以解決現有技術的技術問題。
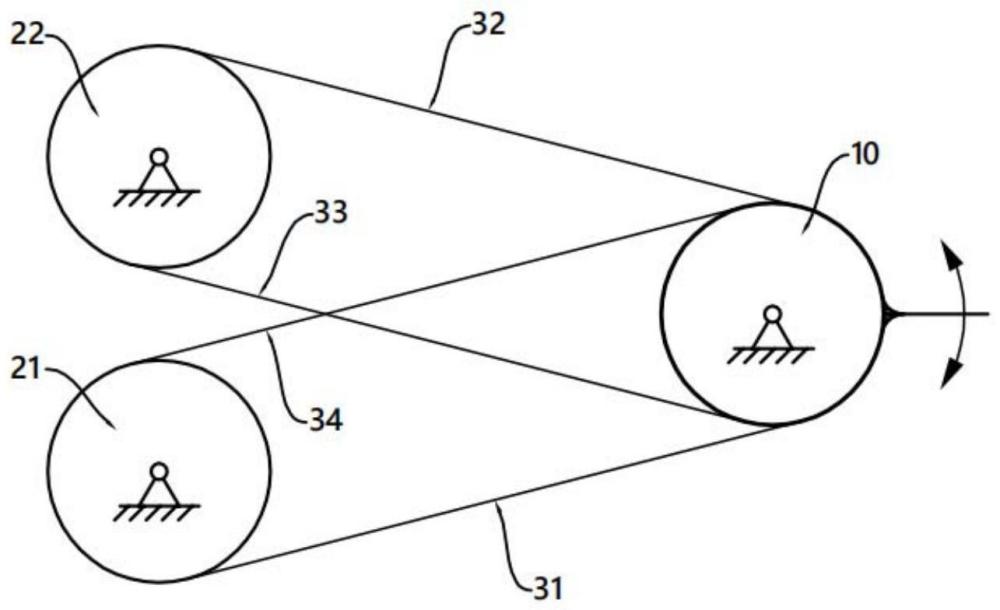
2、為實現上述目的,本技術采用的技術方案是:提供了一種關節驅動裝置,包括基座和轉動端,所述轉動端可相對于所述基座繞一軸線轉動;所述轉動端連接有第一傳動腱和第二傳動腱,所述第一傳動腱與第一驅動裝置連接,所述第二傳動腱與第二驅動裝置連接;
3、所述第一傳動腱可受所述第一驅動裝置的驅動對所述轉動端產生朝第一方向轉動的第一力矩;所述第二傳動腱可受所述第二驅動裝置的驅動對所述轉動端產生朝第二方向轉動的第二力矩;
4、所述轉動端還連接有第三傳動腱,所述第三傳動腱與所述第二驅動裝置連接,所述第三傳動腱可受所述第二驅動裝置的驅動對所述轉動端產生朝第一方向轉動的第三力矩;所述轉動端還連接有第四傳動腱,所述第四傳動腱與所述第一驅動裝置連接,所述第四傳動腱可受所述第一驅動裝置的驅動對所述轉動端產生朝第二方向轉動的第四力矩。
5、本技術的一種實施例中,所述第二驅動裝置包括第二驅動輪,所述第二傳動腱、所述第三傳動腱的一端分別固聯在所述第二驅動輪上;所述第一驅動裝置包括第一驅動輪,所述第一傳動腱、所述第四傳動腱的一端分別固聯在第一驅動輪上。
6、本技術的一種實施例中,所述第二驅動輪包括兩個腱傳動部,所述第二傳動腱、所述第三傳動腱可分別繞于所述兩個腱傳動部處;所述第一驅動輪包括兩個腱傳動部,所述第一傳動腱、所述第四傳動腱可分別繞于所述兩個腱傳動部處。
7、本技術的一種實施例中,所述關節驅動裝置具有拮抗工作模式;
8、在拮抗工作模式下,所述第一傳動腱與所述第二傳動腱處于張緊狀態,所述第一傳動腱受所述第一驅動裝置驅動,所述第二傳動腱受所述第二驅動裝置驅動;所述第一傳動腱和所述第二傳動腱組成拮抗對,分別在不同方向牽拉所述轉動端;在拮抗工作模式下,所述第三傳動腱和所述第四傳動腱處于松弛狀態。
9、本技術的一種實施例中,所述關節驅動裝置具有以下增力工作模式:
10、所述轉動端朝第一方向轉動,所述第一傳動腱與所述第三傳動腱處于張緊狀態,所述第一傳動腱受所述第一驅動裝置驅動對所述轉動端產生朝第一方向轉動的第一力矩,所述第三傳動腱受所述第二驅動裝置驅動對所述轉動端產生朝第一方向轉動的第三力矩,所述第一傳動腱和第三傳動腱同時牽拉轉動端使所述轉動端朝第一方向轉動;所述第二傳動腱和所述第四傳動腱處于松弛狀態。
11、本技術的一種實施例中,所述關節驅動裝置還具有以下增力工作模式:
12、所述轉動端朝第二方向轉動,所述第二傳動腱與所述第四傳動腱處于張緊狀態,所述第四傳動腱受所述第一驅動裝置驅動對所述轉動端產生朝第二方向轉動的第四力矩,所述第二傳動腱受所述第二驅動裝置驅動對所述轉動端產生朝第二方向轉動的第二力矩,所述第二傳動腱和第四傳動腱同時牽拉轉動端使所述轉動端朝第二方向轉動;所述第一傳動腱和所述第三傳動腱處于松弛狀態。
13、本技術還提供了一種關節驅動裝置的控制方法,所述關節驅動裝置包括基座和轉動端,所述轉動端可相對于所述基座繞一軸線轉動;
14、所述轉動端連接有第一傳動腱和第二傳動腱,所述第一傳動腱與第一驅動裝置連接,所述第二傳動腱與第二驅動裝置連接;所述轉動端還連接有第三傳動腱,所述第三傳動腱與所述第二驅動裝置連接;所述轉動端還連接有第四傳動腱,所述第四傳動腱與所述第一驅動裝置連接;通過以下方法可使所述關節驅動裝置處于拮抗工作模式:
15、使所述第一傳動腱與所述第二傳動腱處于張緊狀態,使所述第三傳動腱和所述第四傳動腱處于松弛狀態;通過所述第一驅動裝置驅動所述第一傳動腱,使所述第一傳動腱對所述轉動端產生朝第一方向轉動的第一力矩;通過所述第二驅動裝置驅動所述第二傳動腱,使所述第二傳動腱對所述轉動端產生朝第二方向轉動的第二力矩;所述第一傳動腱和所述第二傳動腱組成拮抗對,分別在不同方向牽拉所述轉動端。
16、本技術的一種實施例中,所述控制方法包括:
17、通過調整或者預先設置,使得所述第三傳動腱和所述第四傳動腱在拮抗工作模式下處于松弛狀態;通過調整或者預先設置,使得所述第一傳動腱和所述第二傳動腱在拮抗工作模式下處于張緊狀態。
18、本技術的一種實施例中,所述控制方法還包括,通過以下方法可使所述關節驅動裝置處于朝第一方向轉動的增力工作模式:
19、使所述第一傳動腱與所述第三傳動腱處于張緊狀態,使所述第二傳動腱和所述第四傳動腱處于松弛狀態;通過所述第一驅動裝置驅動所述第一傳動腱,使所述第一傳動腱對所述轉動端產生朝第一方向轉動的第一力矩;通過所述第二驅動裝置驅動所述第三傳動腱,使所述第三傳動腱對所述轉動端產生朝第一方向轉動的第三力矩;所述第一傳動腱和所述第三傳動腱同時牽拉所述轉動端朝第一方向轉動,所述關節驅動裝置處于增力工作模式。
20、本技術的一種實施例中,所述控制方法還包括,通過以下方法可使所述關節驅動裝置處于朝第二方向轉動的增力工作模式:
21、使所述第二傳動腱與所述第四傳動腱處于張緊狀態,使所述第一傳動腱和所述第三傳動腱處于松弛狀態;通過所述第一驅動裝置驅動所述第四傳動腱,使所述第四傳動腱對所述轉動端產生朝第二方向轉動的第四力矩;通過所述第二驅動裝置驅動所述第二傳動腱,使所述第二傳動腱對所述轉動端產生朝第二方向轉動的第二力矩;所述第二傳動腱與所述第四傳動腱同時牽拉所述轉動端朝第二方向轉動,所述關節驅動裝置處于增力工作模式。
22、本技術的一種實施例中,所述控制方法包括:
23、使所述關節驅動裝置的常態工作模式為拮抗工作模式;
24、當需要增力時,控制關節驅動裝置的工作模式由拮抗工作模式轉換為增力工作模式。
25、本技術的一種實施例中,所述控制方法包括:
26、所述轉動端朝第一方向轉動時,通過控制所述第二驅動裝置的轉動,使所述關節驅動裝置由拮抗工作模式轉換為增力工作模式,或者,使所述關節驅動裝置由增力工作模式轉換為拮抗工作模式。
27、本技術的一種實施例中,所述控制方法包括以下任意一種:
28、當拮抗工作模式下所述轉動端朝第一方向轉動,需要增力時,通過控制第二驅動裝置的轉動,使所述第二傳動腱由張緊狀態轉為逐漸松弛而脫離拮抗狀態,并使所述第三傳動腱由松弛狀態轉為逐漸張緊,直到所述第三傳動腱張緊出現張力,所述關節驅動裝置的工作模式由拮抗工作模式轉換為增力工作模式;
29、當增力工作模式下所述轉動端朝第一方向轉動時,可通過控制第二驅動裝置的轉動,使所述第三傳動腱由張緊狀態轉為逐漸松弛而脫離拮抗狀態,所述第二傳動腱由松弛狀態轉為逐漸拉緊,直到所述第二傳動腱張緊出現張力,所述關節驅動裝置由增力工作模式轉換為拮抗工作模式。
30、本技術的一種實施例中,所述控制方法包括:
31、所述轉動端朝第二方向轉動時,通過控制所述第一驅動裝置的轉動,使所述關節驅動裝置由拮抗工作模式轉換為增力工作模式,或者,使所述關節驅動裝置由增力工作模式轉換為拮抗工作模式。
32、本技術的一種實施例中,所述控制方法包括以下任意一種:
33、當拮抗工作模式下所述轉動端朝第二方向轉動,需要增力時,通過控制所述第一驅動裝置的轉動,使所述第一傳動腱由張緊狀態轉為逐漸松弛而脫離拮抗狀態,并使所述第四傳動腱由松弛狀態轉為逐漸拉緊,直到所述第四傳動腱張緊出現張力,所述關節驅動裝置的工作模式由拮抗工作模式轉換為增力工作模式;
34、當增力工作模式下所述轉動端朝第二方向轉動時,可通過控制第一驅動裝置的轉動,使所述第四傳動腱由張緊狀態轉為逐漸松弛而脫離拮抗狀態,所述第一傳動腱由松弛狀態轉為逐漸拉緊,直到所述第一傳動腱張緊出現張力,所述關節驅動裝置由增力工作模式轉換為拮抗工作模式。
35、本技術的有益效果在于:
36、本技術提供的關節驅動裝置及其控制方法,通過增設第三傳動腱和第四傳動腱,對現有的拮抗驅動方案上進行驅動能力的擴展;可使關節驅動裝置增加增力工作模式,提高了驅動方案的極限驅動能力;同時,無需采用較大功率的驅動器,節省了費用,也避免了較大功率的驅動器占據更大的物理空間。本技術提供的關節驅動裝置及其控制方法,尤其適用于對稱式拮抗驅動關節。
- 還沒有人留言評論。精彩留言會獲得點贊!