一種短線法預制拼裝梁線形控制方法及控制系統
本發明屬于橋梁控制,具體涉及一種短線法預制拼裝梁線形控制方法及控制系統。
背景技術:
1、節段預制拼裝橋梁一般是指將橋梁結構劃分為若干階段,在梁場分段預制完成后,運輸至橋位,施加預應力進行逐段拼裝的施工方法,即先“化整為零”,再“化零為整”。整個施工過程中涉及三種不同的幾何線形:設計成橋線形、制造線形和拼裝線形。其中,設計成橋線形是理想的設計線形狀態;制造線形是指節段在梁場預制生產得到的無應力狀態下的線形;拼裝線形是指節段預制完成運至橋址后,將各節段依次連接拼裝、架設完成后形成的線形。通過控制制造線形和拼裝線形,使實際線形向設計成橋線形靠攏。值得注意的是,對于節段預制拼裝橋梁,當所有節段預制完成后,橋梁線形也隨之基本確定,因此節段預制拼裝橋梁的幾何線形控制主要取決于節段預制得到的制造線形。
2、主梁節段預制有長線法和短線法兩種線形控制方法。長線法一次澆筑整跨或半跨,對預制場地和運輸空間要求較大,且底模安裝完成后一般不再調整,預制線形固定,因此只適用于直線橋梁,在大型項目中已逐步被淘汰。短線法將一跨結構劃分為若干較短節段,每次只澆筑一個節段,澆筑完成后的節段作為下一待澆節段的活動端模,移動至匹配位置,如此循環至所有節段預制完畢。該方法在預制過程中對匹配節段位置坐標的控制直接影響橋梁的幾何線形。短線法節段預制梁幾何線形的控制,主要通過調整匹配節段的位置和姿態來實現。
3、目前,在批量化生產的節段梁預制幾何線控中,國內外均流行采用基于全站儀測量的六點控制法確定梁體的三維空間位置,即通過節段梁中心線上2?個測點fh、bh來控制節段梁的平面位置,通過左、右兩側腹板頂板上各2?個測點(左:fl、bl,右:fr、br)來控制節段梁高程位置和姿態。有少部分項目工程采用電子水準儀、水準標尺等測量標高,也有個別在大尺寸節段上設置10個控制點。現場人工測量誤差較大,且測量工作量巨大,造成勞動力和時間密集,效率低下,耗費大量人力和財力,導致施工成本較高。相關線形控制計算通常采用先預估線形、再在后續梁段生產中對所預測線形的各項誤差進行糾偏修正的方法,該方法會導致累計誤差較大,且計算效率較低。
技術實現思路
1、本發明提供一種短線法預制拼裝梁線形控制方法及控制系統,以解決目前短線法節段梁預制過程中測量誤差大、效率低等技術問題。
2、為實現上述技術目的,本發明采用如下技術方案:
3、一種短線法預制拼裝梁線形控制方法,包括:
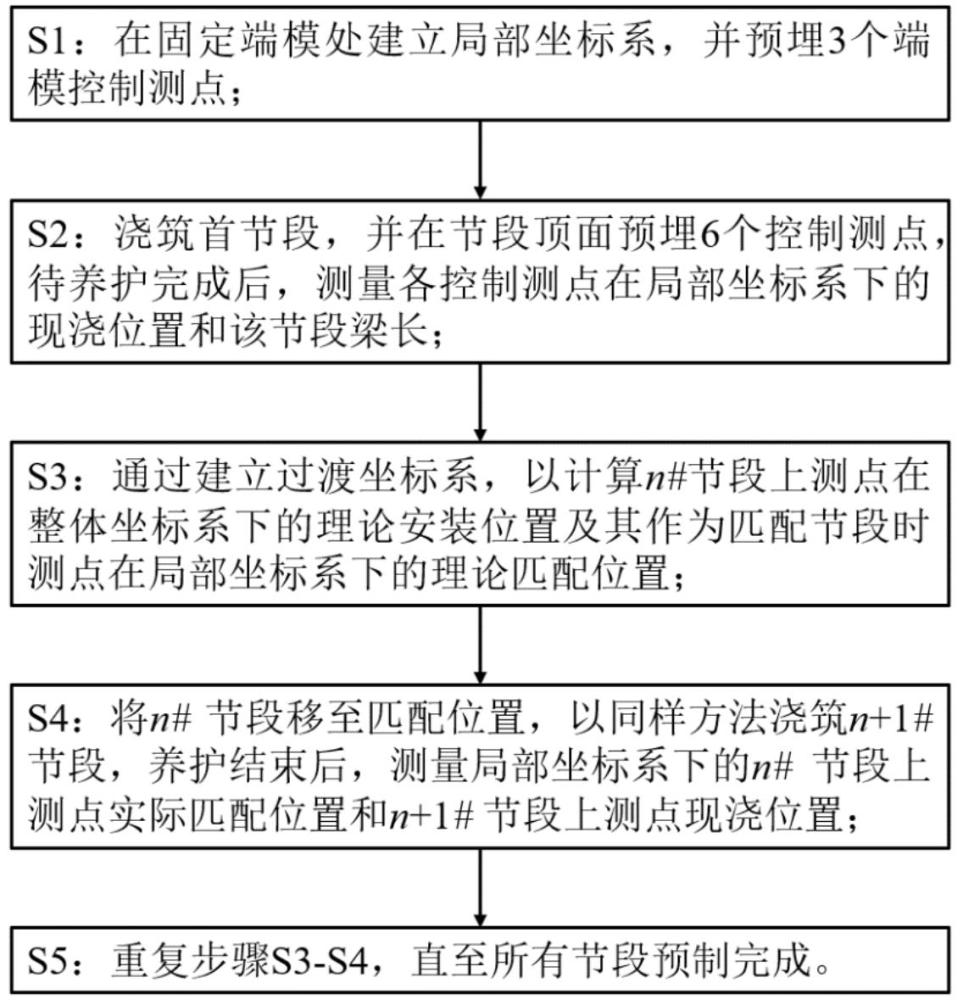
4、步驟1:在固定端模處建立局部坐標系;
5、步驟2:確定生產的首節段梁并進行澆筑,測量首節段梁的梁長及其控制測點在局部坐標系下的現澆位置;
6、步驟3:建立首節段梁的過渡坐標系,利用首節段梁的過渡坐標系與局部坐標系之間的位置關系,以及利用首節段梁的梁長及其控制測點在局部坐標系下的現澆位置,計算首節段梁控制測點在整體坐標系下的理論安裝位置和首節段梁作為匹配端模時在局部坐標系下的理論匹配位置;
7、步驟4:對除首節段梁之后的其余節段梁依次進行澆筑和測量控制測點的現澆位置;在每節段澆筑時:
8、將前一節段梁移動至其控制測點到達理論匹配位置,作為當前節段梁澆筑的匹配端模;
9、若當前節段梁不是最后一個節段梁,則:建立當前節段梁的過渡坐標系,構建局部坐標系、過渡坐標系和整體坐標系兩兩之間的轉換矩陣,并利用轉換矩陣和控制測點的現澆位置,計算當前節段梁控制測點在整體坐標系下的理論安裝位置和當前節段梁作為匹配端模時在局部坐標系下的理論匹配位置。
10、進一步的,所述局部坐標系,以固定端模與梁體的交面和梁頂面中心線的交點為坐標系原點,沿梁頂面中心線指向匹配端模方向為軸正方向,向上為正方向,根據右手法則確定軸正方向。
11、進一步的,在首節段梁的澆筑過程中,始終保持現澆節段梁頂面中心線同時與固定端模和匹配端模垂直。
12、進一步的,步驟3中,計算首節段梁控制測點在整體坐標系下的理論安裝位置,具體包括:
13、s301:建立首節段梁的過渡坐標系,以匹配端模與梁體的交面和梁頂面中心線的交點為原點,沿頂面中心線指向固定端模方向為軸正方向,向上為軸正方向,根據右手法則確定軸正方向;
14、s302:利用首節段梁的梁長,將首節段梁各控制測點在局部坐標系下的現澆位置坐標,轉換為其在過渡坐標系中的過渡坐標:
15、
16、式中,,
17、s303:將首節段梁各控制測點在過渡坐標系中的過渡坐標,轉換為其在整體坐標系下的理論安裝位置;
18、s30301:根據首節段梁兩端節點在整體坐標系中的理論安裝位置,即節點1和節點2,計算首節段梁過渡坐標系各坐標軸在整體坐標系中的方向向量:
19、
20、
21、
22、其中,節段梁的節點定義為:對于任意節段梁n,其梁面中心線與兩側橫截面的交點分別為節點n和節點n+1;
23、s30302:建立首節段梁過渡坐標系和整體坐標系之間的轉換矩陣:
24、
25、s30303:根據坐標轉換的計算基點,將各控制測點在過渡坐標系中的過渡坐標轉換為其整體坐標系下的理論安裝位置:
26、
27、式中,首節段梁的基點,取過渡坐標系的原點。
28、進一步的,步驟3中在計算得到首節段梁控制測點在整體坐標系下的理論安裝位置后,進一步計算首節段梁作為匹配端模時在局部坐標系下的理論匹配位置,具體包括:
29、s304:對節點2在整體坐標系下的理論安裝位置進行修正,得到節點2的實際安裝位置:
30、
31、式中,為首節段梁長,為首節段梁轉換矩陣的第一行;
32、s305:計算首節段梁從現澆位置移至匹配位置的目標位置坐標,即計算其各控制測點在整體坐標系下的理論安裝位置轉換為其在局部坐標系下的理論匹配位置;
33、s30501:根據節點3在整體坐標系下的坐標、節點2的實際安裝位置,計算首節段梁上整體坐標系各坐標軸在局部坐標系中的方向向量:
34、
35、
36、
37、s30502:建立整體坐標系和局部坐標系之間的轉換矩陣:
38、
39、s30503:將首節段梁上測點在整體坐標系中的理論安裝位置轉換為局部坐標系下的理論匹配位置:
40、
41、式中,為設計線形中節點3在整體坐標系中的坐標。
42、進一步的,步驟4中計算當前節段梁控制測點在整體坐標系下的理論安裝位置,具體為:
43、step401:建立節段梁的過渡坐標系:以節段梁上的控制測點為原點,以向量方向為軸正方向,向上為軸正方向,根據右手法則確定軸正方向;
44、step402:將節段梁在局部坐標系下的現澆位置坐標轉換為其在過渡坐標系中的過渡坐標。
45、首先計算過渡坐標系各坐標軸在局部坐標系中的方向向量、、,建立局部坐標系和過渡坐標系之間的轉換矩陣:
46、
47、
48、
49、
50、式中,、、表示節段梁上測點在局部坐標系下的實際匹配位置;
51、然后將測點在局部坐標系中的現澆位置轉換為其在過渡坐標系中的過渡坐標:
52、
53、式中,、、為節段梁上測點在局部坐標系中的實際匹配位置;
54、step403:將節段梁上各控制測點在過渡坐標系中的過渡坐標轉換為其在整體坐標系下的理論安裝位置。
55、step40301:計算節段梁上過渡坐標系各坐標軸在整體坐標系中的方向向量:
56、
57、
58、
59、step40302:建立過渡坐標系和整體坐標系之間的轉換矩陣:
60、
61、step40303:根據坐標轉換的計算基點,將過渡坐標系中的過渡坐標轉換為整體坐標系下的理論安裝坐標:
62、
63、式中為節段梁上測點的理論安裝坐標。
64、進一步的,步驟4在計算得到當前節段梁控制測點在整體坐標系下的理論安裝位置后,進一步計算當前節段梁作為匹配端模時在局部坐標系下的理論匹配位置,具體包括:
65、step404:對節點在整體坐標系下的坐標進行修正:
66、
67、
68、式中,為節點在過渡坐標系中的過渡坐標,為節段梁上控制測點在局部坐標系中的實際匹配位置;節點在整體坐標系下修正后的坐標;
69、step405:計算節段各控制測點在整體坐標系下的理論安裝位置轉換為局部坐標系下的理論匹配位置:
70、step40501:根據節點在整體坐標系下的理論安裝坐標、節點修正后的坐標,計算節段上整體坐標系各坐標軸在局部坐標系中的方向向量:
71、
72、
73、
74、step40502:建立整體坐標系與局部坐標系之間的轉換矩陣:
75、
76、step40503:將節段上測點在整體坐標系中的理論安裝位置轉換為局部坐標系下的理論匹配位置:
77、
78、式中,為設計線形中節點在整體坐標中的坐標。
79、進一步的,節段梁上控制測點在局部坐標系中的實際匹配位置,步驟4在將節段梁移動至其控制測點到達理論匹配位置的過程中,通過反復移動和測量節段梁上控制測點的實際匹配位置,直至控制測點的實際匹配位置與理論匹配位置的偏差控制在容許偏差范圍內。
80、一種短線法預制拼裝梁線形控制系統,包括:測量機器人、智能底模臺車和短線法預制拼裝梁線形控制裝置;
81、所述測量機器人用于:采集獲取固定端模控制點和各節段梁上控制測點在在局部坐標系中的現澆位置和實際匹配位置;
82、所述智能底模臺車用于:承載節段梁并接收控制將承載的節段梁移動至目標位置;
83、所述短線法預制拼裝梁線形控制裝置,與測量機器人、智能底模臺車結合,實現上述任一項技術方案所述的短線法預制拼裝梁線形控制方法。
84、與現有技術相比,本發明的短線法預制拼裝梁線形控制方法,優點在于:采用三維坐標線形控制,線控精度高,同時計算過程中引入過渡坐標系,直接計算所需坐標數據,不產生傳統控制方法中先預測、再糾偏產生的轉角誤差、梁長誤差等各種誤差,計算原理相對簡單,便于編譯成計算機程序,提高計算效率。同時,本發明能夠有效減少人工投入,實現預制梁場少人化或無人化智能控制一體化,從而減少人工導致的測量和匹配的誤差,提高現場生產效率。
- 還沒有人留言評論。精彩留言會獲得點贊!