一種挖掘機的控制方法及系統與流程
本發明涉及挖掘機,尤其涉及一種挖掘機的控制方法及系統。
背景技術:
1、目前在眾多的基建工程項目中,挖掘機作為一種應用廣泛的工程機械,扮演著重要的角色。然而現有挖掘機的控制系統只是單一的某個系統,并沒有能將傳統的挖掘機控制系統與遙控系統、自主作業系統關聯起來,充分利用各系統的優勢,造成了一定的資源與成本浪費,且傳統的挖掘機控制系統無仲裁機制與完善的安全保護機制,從而導致系統存在人機沖突的問題,以及作業人員操控挖掘機時存在一定安全風險,人機交互性較差。
2、因此,現時提供一種挖掘機的控制方法及系統,能夠優化挖掘機的人機交互模式,使挖掘機的控制方式智能化,有利于提高作業人員對機器操控的安全性與便捷性,以及提高作業人員對挖掘機的交互性。
技術實現思路
1、本發明提供了一種挖掘機的控制的方法及系統,能夠優化挖掘機的人機交互模式,使挖掘機的控制方式智能化,有利于提高作業人員對機器操控的安全性與便捷性,以及提高作業人員對挖掘機的交互性。
2、為了解決上述技術問題,本發明第一方面公開了一種挖掘機的控制方法,所述方法包括:
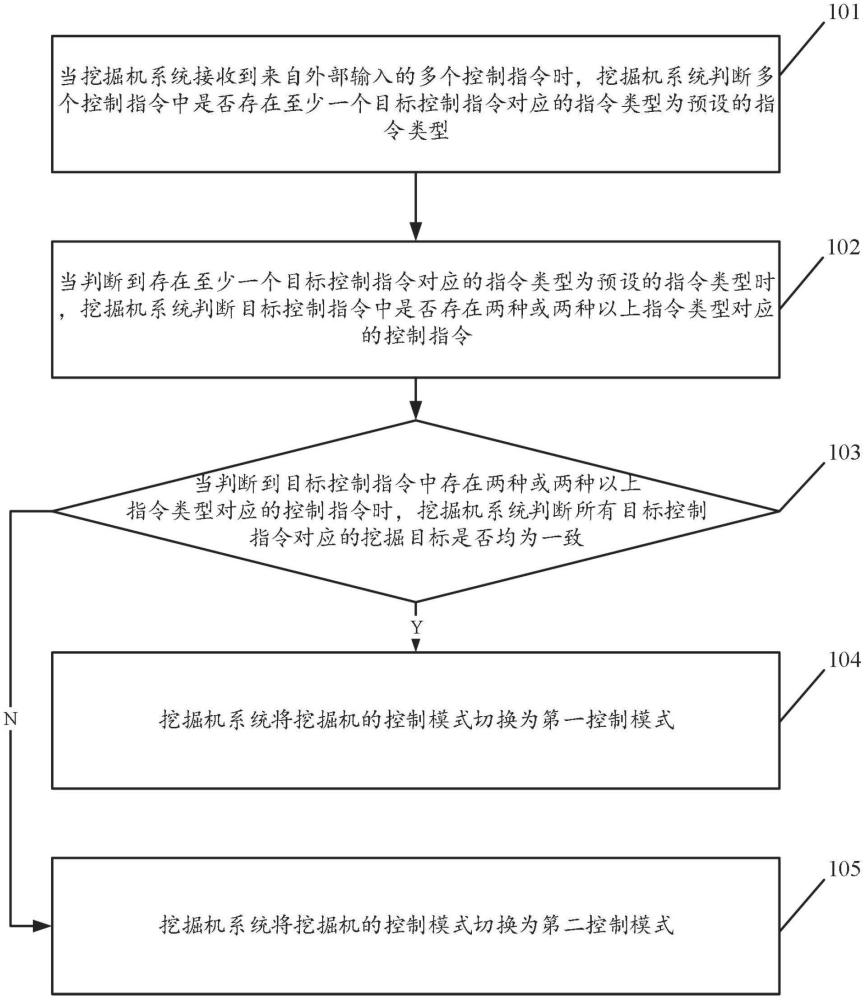
3、當挖掘機系統的控制器接收到來自外部輸入的多個控制指令時,所述挖掘機系統判斷所述多個控制指令中是否存在至少一個目標控制指令對應的指令類型為預設的指令類型;
4、當判斷到存在至少一個目標控制指令對應的指令類型為預設的指令類型時,所述挖掘機系統判斷所述目標控制指令中是否存在兩種或兩種以上指令類型對應的控制指令;
5、當判斷到所述目標控制指令中存在兩種或兩種以上指令類型對應的控制指令時,所述挖掘機系統判斷所有目標控制指令對應的挖掘目標是否均為一致;
6、當判斷到所有目標控制指令對應的挖掘目標均為一致,所述挖掘機系統將所述挖掘機的控制模式切換為第一控制模式;
7、當判斷到所有目標控制指令對應的挖掘目標不一致,所述挖掘機系統將所述挖掘機的控制模式切換為第二控制模式。
8、作為一種可選的實施方式,在本發明第一方面中,所述預設的指令類型包括:手動控制類型、遙控控制類型、自動控制類型中的其中一種,所述第一控制模式表示為人機共享模式,所述第二控制模式表示為人機切換模式:
9、所述控制模式還包括:手動控制模式、遙控控制模式、自動控制模式的其中一種,其中,所述手動控制模式用于對所述挖掘機執行與所述手動控制類型相關的控制操作,所述遙控控制模式用于對所述挖掘機執行與所述遙控控制類型相關的控制操作,所述自動控制模式用于對所述挖掘機執行與所述自動控制類型相關的控制操作;
10、所述挖掘機系統將所述挖掘機的控制模式切換為第一控制模式,包括:
11、所述挖掘機系統根據預設的控制算法與所述目標控制指令的指令類型對所述目標控制指令進行計算,得到最優控制指令,并將所述最優控制指令作為對所述挖掘機執行控制操作的控制指令;
12、其中,所述預設的控制算法的計算公式表示為:u=uhk+um(1-k);
13、所述k表示為控制權分配系數,所述uh表示為作業人員輸入參數,所述作業人員輸入參數包括:所述手動控制類型與所述遙控控制類型對應的控制指令,所述um表示為機器輸入參數,所述機器輸入參數包括:所述自動控制類型對應的控制指令,所述u表示為所述挖掘機系統的實際輸入;
14、所述方法還包括:
15、當判斷到所述多個控制指令中存在任意一個目標控制指令對應的指令類型不為預設的指令類型時,將所述目標控制指令丟棄。
16、作為一種可選的實施方式,在本發明第一方面中,所述挖掘機系統將所述挖掘機的控制模式切換為第二控制模式,包括:
17、所述挖掘機系統根據每一個目標控制指令對應的指令類型確定出每一個目標控制指令對應的指令優先級,并根據每一個目標控制指令對應的指令優先級對所述挖掘機進行控制操作;
18、其中,所述手動控制類型的控制指令對應的指令優先級為第一優先級,所述遙控控制類型的控制指令對應的指令優先級為第二優先級,所述自動控制類型的控制指令對應的指令優先級為第三優先級。
19、作為一種可選的實施方式,在本發明第一方面中,所述方法還包括:
20、當判斷到所述目標控制指令中僅存在一種指令類型對應的控制指令時,所述挖掘機系統判斷所述目標控制指令對應的指令類型是否為手動控制類型;
21、當判斷到所述目標控制指令對應的指令類型為手動控制類型時,所述挖掘機系統根據所述目標控制指令對所述挖掘機執行與所述手動控制類型相關的控制操作;
22、當判斷到所述目標控制指令對應的指令類型不為手動控制類型時,所述挖掘機系統判斷所述目標控制指令對應的指令類型是否為遙控控制類型;
23、當判斷到所述目標控制指令對應的指令類型為遙控控制類型時,所述挖掘機系統根據所述目標控制指令對所述挖掘機執行與所述遙控控制類型相關的控制操作;
24、當判斷到所述目標控制指令對應的指令類型不為遙控控制類型時,所述挖掘機系統判斷所述目標控制指令對應的指令類型是否為自動控制類型;
25、當判斷到所述目標控制指令對應的指令類型為遙控控制類型時,所述挖掘機系統根據所述目標控制指令對所述挖掘機執行與所述自動控制類型相關的控制操作。
26、作為一種可選的實施方式,在本發明第一方面中,所述方法還包括:
27、當所述挖掘機的控制模式處于自動控制模式時,所述挖掘機系統判斷所述挖掘機是否滿足預設的異常條件;
28、當判斷到所述挖掘機滿足第一異常條件時,所述挖掘機系統將所述挖掘機的控制模式從所述自動控制模式切換為所述手動控制模式;
29、當判斷到所述挖掘機滿足第二異常條件時,所述挖掘機系統將所述挖掘機的控制模式從所述自動控制模式切換為所述遙控控制模式;
30、當判斷到所述挖掘機滿足第三異常條件時,所述挖掘機系統退出所述自動控制模式并停止對所述挖掘機的控制操作。
31、作為一種可選的實施方式,在本發明第一方面中,所述方法還包括:
32、所述挖掘機系統通過所述挖掘機設置的傳感器采集所述挖掘機當前工作狀態所處的工作參數,所述工作參數包括:外界參數與內部參數,所述外界參數包括:外界氣象環境參數、外界地理環境參數中的至少一種,內部參數包括所述挖掘機艙內的作業人員狀態參數、內部環境參數中的至少一種;
33、判斷所述挖掘機當前工作狀態所處的工作參數是否滿足預設的參數條件;
34、當判斷到所述工作參數滿足第一參數條件時,所述挖掘機系統將所述挖掘機的控制模式切換為所述手動控制模式;
35、當判斷到所述工作參數滿足第二參數條件時,所述挖掘機系統將所述挖掘機的控制模式切換為所述遙控控制模式;
36、當判斷到所述工作參數滿足第三參數條件時,所述挖掘機系統將所述挖掘機的控制模式切換為所述自動控制模式。
37、作為一種可選的實施方式,在本發明第一方面中,所述方法還包括:
38、當所述挖掘機的控制模式處于所述自動控制模式或所述遙控控制模式時,所述挖掘機系統判斷所述挖掘機內部是否觸發了預設的人為操作動作;
39、判斷到所述挖掘機內部觸發了預設的人為操作動作時,所述挖掘機系統向作業人員發送退出自動控制模式或遙控控制模式的請求,并向作業人員發送觸發人工操作動作的提示,等待所述作業人員響應所述請求;
40、當所述請求對應的等待響應的時長大于預設時長時,所述挖掘機系統停止所述自動控制模式或所述遙控控制模式;
41、其中,所述預設的人為操作動作包括:手柄操控動作、解鎖動作、鎖定動作的其中一種。
42、本發明第二方面公開了一種挖掘機的控制系統,所述系統包括:
43、判斷模塊,用于當挖掘機系統接收到來自外部輸入的多個控制指令時,判斷所述多個控制指令中是否存在至少一個目標控制指令對應的指令類型為預設的指令類型;
44、所述判斷模塊,還用于當判斷到存在至少一個目標控制指令對應的指令類型為預設的指令類型時,判斷所述目標控制指令中是否存在兩種或兩種以上指令類型對應的控制指令;
45、所述判斷模塊,還用于當所述判斷模塊判斷到所述目標控制指令中存在兩種或兩種以上指令類型對應的控制指令時,判斷所有目標控制指令對應的挖掘目標是否均為一致;
46、切換模塊,用于當判斷到所有目標控制指令對應的挖掘目標均為一致,將挖掘機的控制模式切換為第一控制模式;
47、切換模塊,還用于當所述判斷模塊判斷到所有目標控制指令對應的挖掘目標不一致,將挖掘機的控制模式切換為第二控制模式。
48、作為一種可選的實施方式,在本發明第二方面中,所述預設的指令類型包括:手動控制類型、遙控控制類型、自動控制類型中的其中一種,所述第一控制模式表示為人機共享模式,所述第二控制模式表示為人機切換模式:
49、所述控制模式還包括:手動控制模式、遙控控制模式、自動控制模式的其中一種,其中,所述手動控制模式用于對所述挖掘機執行與所述手動控制類型相關的控制操作,所述遙控控制模式用于對所述挖掘機執行與所述遙控控制類型相關的控制操作,所述自動控制模式用于對所述挖掘機執行與所述自動控制類型相關的控制操作;
50、所述切換模塊將所述挖掘機的控制模式切換為第一控制模式的具體方式為:
51、根據預設的控制算法與所述目標控制指令的指令類型對所述目標控制指令進行計算,得到最優控制指令,并將所述最優控制指令作為對所述挖掘機執行控制操作的控制指令;
52、其中,所述預設的控制算法的計算公式表示為:u=uhk+um(1-k);
53、所述k表示為控制權分配系數,所述uh表示為作業人員輸入參數,所述作業人員輸入參數包括:所述手動控制類型與所述遙控控制類型對應的控制指令,所述um表示為機器輸入參數,所述機器輸入參數包括:所述自動控制類型對應的控制指令,所述u表示為所述挖掘機系統的實際輸入;
54、所述裝置還包括:
55、丟棄模塊,用于當所述判斷模塊判斷到所述多個控制指令中存在任意一個目標控制指令對應的指令類型不為預設的指令類型時,將所述目標控制指令丟棄。
56、作為一種可選的實施方式,在本發明第二方面中,所述切換模塊將所述挖掘機的控制模式切換為第二控制模式的具體方式為:
57、根據每一個目標控制指令對應的指令類型確定出每一個目標控制指令對應的指令優先級,并根據每一個目標控制指令對應的指令優先級對所述挖掘機進行控制操作;
58、其中,所述手動控制類型的控制指令對應的指令優先級為第一優先級,所述遙控控制類型的控制指令對應的指令優先級為第二優先級,所述自動控制類型的控制指令對應的指令優先級為第三優先級。
59、作為一種可選的實施方式,在本發明第二方面中,所述裝置還包括:
60、判斷模塊,還用于當判斷到所述目標控制指令中僅存在一種指令類型對應的控制指令時,判斷所述目標控制指令對應的指令類型是否為手動控制類型;
61、控制模塊,用于當所述判斷模塊判斷到所述目標控制指令對應的指令類型為手動控制類型時,根據所述目標控制指令對所述挖掘機執行與所述手動控制類型相關的控制操作;
62、所述判斷模塊,當判斷到所述目標控制指令對應的指令類型不為手動控制類型時,判斷所述目標控制指令對應的指令類型是否為遙控控制類型;
63、所述控制模塊,還用于當所述判斷模塊判斷到所述目標控制指令對應的指令類型為遙控控制類型時,根據所述目標控制指令對所述挖掘機執行與所述遙控控制類型相關的控制操作;
64、所述判斷模塊,還用于當判斷到所述目標控制指令對應的指令類型不為遙控控制類型時,判斷所述目標控制指令對應的指令類型是否為自動控制類型;
65、所述控制模塊,還用于當所述判斷模塊判斷到所述目標控制指令對應的指令類型為遙控控制類型時,根據所述目標控制指令對所述挖掘機執行與所述自動控制類型相關的控制操作。
66、作為一種可選的實施方式,在本發明第二方面中,所述裝置還包括:
67、所述判斷模塊,還用于當所述挖掘機的控制模式處于自動控制模式時,判斷所述挖掘機是否滿足預設的異常條件;
68、所述切換模塊,還用于當所述判斷模塊判斷到所述挖掘機滿足第一異常條件時,將所述挖掘機的控制模式從所述自動控制模式切換為所述手動控制模式;
69、當判斷到所述挖掘機滿足第二異常條件時,將所述挖掘機的控制模式從所述自動控制模式切換為所述遙控控制模式;
70、停止模塊,用于當所述判斷模塊判斷到所述挖掘機滿足第三異常條件時,退出所述自動控制模式并停止對所述挖掘機的控制操作。
71、作為一種可選的實施方式,在本發明第二方面中,所述裝置還包括:
72、采集模塊,用于通過所述挖掘機設置的傳感器采集所述挖掘機當前工作狀態所處的工作參數,所述工作參數包括:外界參數與內部參數,所述外界參數包括:外界氣象環境參數、外界地理環境參數中的至少一種,內部參數包括所述挖掘機艙內的作業人員狀態參數、內部環境參數中的至少一種;
73、所述判斷模塊,還用于判斷所述采集模塊采集到的所述挖掘機當前工作狀態所處的工作參數是否滿足預設的參數條件;
74、所述切換模塊,還用于當所述判斷模塊判斷到所述工作參數滿足第一參數條件時,將所述挖掘機的控制模式切換為所述手動控制模式;
75、當判斷到所述工作參數滿足第二參數條件時,將所述挖掘機的控制模式切換為所述遙控控制模式;
76、當判斷到所述工作參數滿足第三參數條件時,將所述挖掘機的控制模式切換為所述自動控制模式。
77、作為一種可選的實施方式,在本發明第二方面中,所述裝置還包括:
78、所述判斷模塊,還用于當所述挖掘機的控制模式處于所述自動控制模式或所述遙控控制模式時,判斷所述挖掘機內部是否觸發了預設的人為操作動作;
79、發送模塊,用于當所述判斷模塊判斷到所述挖掘機內部觸發了預設的人為操作動作時,向作業人員發送退出自動控制模式或遙控控制模式的請求,并向作業人員發送觸發人工操作動作的提示;
80、等待模塊,用于等待所述作業人員響應發送模塊發送的所述請求;
81、停止模塊,用于當所述等待模塊等待的所述請求對應的等待響應的時長大于預設時長時,停止所述自動控制模式或所述遙控控制模式;
82、其中,所述預設的人為操作動作包括:手柄操控動作、腳踏板操控動作、解鎖動作、鎖定動作的其中一種。
83、本發明第三方面公開了另一種挖掘機的控制系統,所述系統包括:
84、存儲有可執行程序代碼的存儲器;
85、與所述存儲器耦合的處理器;
86、所述處理器調用所述存儲器中存儲的所述可執行程序代碼,執行本發明第一方面公開的挖掘機的控制方法。
87、本發明第四方面公開了一種計算機存儲介質,所述計算機存儲介質存儲有計算機指令,所述計算機指令被調用時,用于執行本發明第一方面公開的挖掘機的控制方法。
88、與現有技術相比,本發明實施例具有以下有益效果:
89、本發明提供了一種挖掘機的控制方法及系統,該方法包括:當挖掘機系統接收到來自外部輸入的多個控制指令時,挖掘機系統判斷多個控制指令中是否存在至少一個目標控制指令對應的指令類型為預設的指令類型,當判斷到存在至少一個目標控制指令對應的指令類型為預設的指令類型時,判斷目標控制指令中是否存在兩種或兩種以上指令類型對應的控制指令,當判斷到存在兩種或兩種以上的指令類型時,判斷所有目標控制指令對應的挖掘目標是否均為一致;若挖掘目標均為一致,將挖掘機的控制模式切換為第一控制模式,若挖掘目標不一致,將挖掘機的控制模式切換為第二控制模式。可見,實施本發明能夠判斷到輸入挖掘機的控制指令中存在兩種或兩種以上指令類型對應的控制指令時,判斷所有控制指令對應的挖掘目標是否均為一致,并根據挖掘目標對其控制模式進行智能化地切換,能夠優化挖掘機的人機交互模式,使挖掘機的控制方式智能化,減少挖掘機的故障發生的概率以及提高挖掘機的穩定性、從而有利于提高作業人員對機器操控的安全性與便捷性,以及提高作業人員對挖掘機的交互性。
- 還沒有人留言評論。精彩留言會獲得點贊!