基于測量機器人的一體化大壩監測站及監測方法與流程
本發明涉及大型水電工程大壩外形監測,尤其是涉及基于測量機器人的一體化大壩監測站及監測方法。
背景技術:
1、大型水電工程大壩外形監測是一項重要的工程監測項目,旨在確保大壩的結構安全和效能。監測的目的是及時發現大壩的變形、位移、裂縫或其他結構問題,從而采取適當的維護和修復措施。
2、為了實現多角度的視覺檢測,通常采用全站儀專用的支撐件來支撐測量元件,可以實現轉動,提供更大的拍攝角度,然而在具體的大型水電工程大壩外形監測項目中,在監測大壩目標上的多個監測點對應布置多個棱鏡,通常測量機器人與多個棱鏡的距離監測就可以實現對監測大壩目標的變形、位移、裂縫或其他結構問題的監測,然而這些位移的監測實際上是相對位移,也就是全站儀本身與棱鏡之前出現位移變化才會被監測到,若全站儀與棱鏡之間距離不大,在極端情況下,若由于區域微小地震等情況導致的全站儀與棱鏡同步位移,則全站儀監測到的數據就不能真實反映監測大壩目標的位移數據,甚至不能監測到發生了位移。
3、因此,為了保證測量數據準確,設計基于測量機器人的一體化大壩監測站能抵抗外界環境因素帶來的細小位移的測量機器人是大型水電工程大壩外形監測亟需解決的技術問題。
技術實現思路
1、為了解決上述技術問題,本發明提供基于測量機器人的一體化大壩監測站及監測方法。采用如下的技術方案:
2、基于測量機器人的一體化大壩監測站,包括墩體、測量機器人和綜合氣象傳感器組件,墩體底部固定安裝在測量點的地面預制件處,測量機器人包括支撐座、位移補償裝置、測量全站儀、三個位移發生監測組件和基于芯片的位移補償控制器,支撐座的底部可拆卸安裝在墩體的頂部,位移補償裝置的底部可拆卸安裝在支撐座的頂面,位移補償裝置頂部設有位置調整部,測量全站儀的底部安裝面可拆卸安裝在位置調整部,位移發生監測組件包括定位監測元件和標定發生器,定位監測元件安裝在測量全站儀的殼體上,標定發生器設置在距離測量全站儀外至少一公里,且測量全站儀與標定發生器之間無遮擋物,三個位移發生監測組件的定位監測元件分別安裝在測量全站儀除鏡頭面以外的其他三面中部,位移補償控制器每隔設定時間分別控制三個位移發生監測組件的定位監測元件分別與標定發生器進行距離測量,設置距離標準值,當判斷出現距離測量值與距離標準值的差值超過設定差值閾值時,位移補償控制器控制位移補償裝置的位置調整部動作,使距離測量值等于距離標準值;
3、綜合氣象傳感器組件通過支架安裝在墩體上,并位于測量機器人的上方。
4、通過采用上述技術方案,具體的采用一體化大壩監測站來檢測大壩目標的測量點進行位移監測,同時綜合氣象傳感器組件采集監測點位置的氣象信息,氣象信息包括雨量、風向、紫外線等;測量全站儀采用徠卡ts60測量機器人;
5、大壩區域內的同步位移導致的測量全站儀區域與大壩目標區域同步位移,這種位移發生后,測量全站儀無法測得位移的發生,或者只是測得微小的位移發生;
6、為了應對這種情況,采用位移補償控制器分別控制三個位移發生監測組件每隔設定時間對測量全站儀的位置進行監測,根據監測結果,若出現輕微的位移偏差則需要對測量全站儀的位置進行位移補償調整,具體的采用位移補償裝置實現位置的調整,位移補償裝置可以實現平面位置的調整,例如平面電機、平面滑臺等結構,對測量全站儀進行位置調整后,測量全站儀測得的大壩目標監測點的位移量更加精準;
7、由于標定發生器設置在距離測量全站儀外至少一公里,一般設置根據地質情況進行設置,在激光測距儀的量程內進行選擇,在除了監測方向以外的三個不同方向進行位置監測,大概率能監測到由于大壩區域位移導致的測量全站儀位移;
8、能解決大壩區域內的同步位移導致的測量全站儀區域與大壩目標區域同步位移的大壩位移監測問題。
9、可選的,所述位移補償裝置包括安裝板、平面位置調整機構和全站儀支撐板,所述安裝板可拆卸安裝在支撐座的頂面,平面位置調整機構的底部可拆卸在安裝板的頂面上,所述平面位置調整機構設有位置調整部,所述全站儀支撐板的底面可拆卸安裝在位置調整部的頂面上,測量全站儀的底部可拆卸安裝在全站儀支撐板的頂面。
10、可選的,平面位置調整機構是伺服平面滑臺。
11、通過采用上述技術方案,位移補償裝置主要基于伺服平面滑臺來實現,伺服平面滑臺的平面移動精度一般是微米級,能實現行程范圍內平面任意位置的調整,可以滿足測量全站儀平面位置的調整。
12、可選的,位移補償裝置還包括高度調節機構,所述高度調節機構的底部可拆卸安裝在安裝板的頂面上,所述平面位置調整機構的底部安裝在高度調節機構的伸縮部上,所述位移補償控制器控制高度調節機構的執行動作。
13、可選的,高度調節機構包括伺服電缸和高度調整支撐板,所述伺服電缸的底部可拆卸安裝在安裝板的頂面上,所述高度調整支撐板的底面可拆卸安裝在伺服電缸的活塞桿端部,所述高度調整支撐板和伺服電缸的活塞桿組成高度調節機構的伸縮部,平面位置調整機構的底部可拆卸在高度調整支撐板的頂面上。
14、通過采用上述技術方案,高度調節機構的目的是應對大壩目標區域的垂向位移,當平面位置調整機構調整無法完成位置補償目標時,還可以控制高度調節機構動作配合完成位置補償目標調整。
15、可選的,定位監測元件是激光測距傳感器,標定發生器是激光發射器,三個位移發生監測組件的三個激光發射器分別安裝在距離測量全站儀外至少一公里處的三個方向的固定位置,三個激光測距傳感器分別安裝在測量全站儀除鏡頭面以外的其他三面中部,激光測距傳感器接收激光發射器發出的激光束,激光測距傳感器與位移補償控制器通信連接,交互激光測距數據。
16、通過采用上述技術方案,激光測距傳感器在一公里的距離下,精度可以達到1mm,采用三個不同方向的激光發射器來進行位置標定,這個固定位置可以尋找可靠的安裝點,例如建筑物頂部等位置固定點,激光測距傳感器與激光發射器的位置關系實際上可以互換,為了數據傳輸便捷還是將激光測距傳感器安裝在測量全站儀這里,便于數據直接傳輸給位移補償控制器后進行處理并進行后續的位移補償控制。
17、可選的,位移補償控制器包括存儲器、數據分析芯片和控制芯片,所述存儲器與三個位移發生監測組件的定位監測元件通信連接,交互激光測距數據,所述數據分析芯片分析激光測距數據,與控制芯片通信交互判斷結果,并將判斷結果存儲在存儲器,所述控制芯片分別控制平面位置調整機構和高度調節機構的執行動作。
18、通過采用上述技術方案,數據分析芯片可以對測距數據進行高效處理,并輸出判斷結果,控制芯片可以控制平面位置調整機構和高度調節機構執行動作。
19、可選的,位移補償控制器還包括無線通信模塊,所述存儲器通過無線通信模塊與遠端服務器無線通信連接。
20、通過采用上述技術方案,無線通信模塊可以是4g/5g無線模塊等無線通信形式,可以實現與遠端服務器的無線通信。
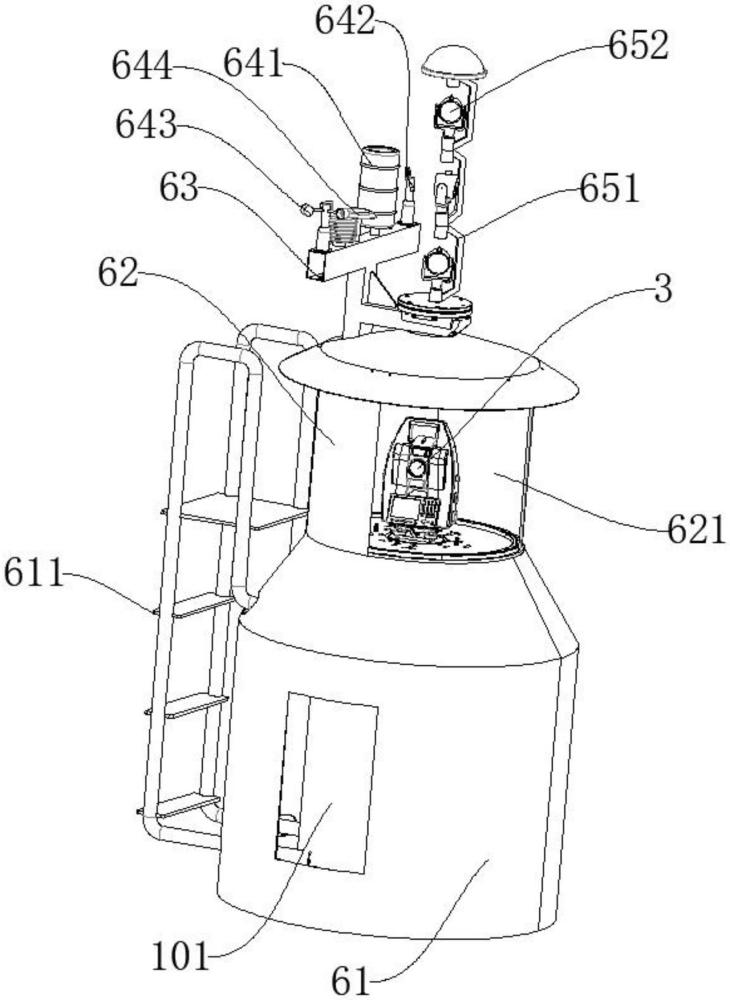
21、可選的,綜合氣象傳感器組件包括外殼體組件、氣象監測支架、氣象傳感器模塊和棱鏡組件,外殼體組件包括墩體外殼部和機器人外殼部,墩體外殼部安裝在墩體外部,外側還設有檢修梯,機器人外殼部底部對接安裝在墩體外殼部的頂部,并罩在測量機器人上方,機器人外殼部的四周設有用于測量機器人監測的多個透明部,氣象監測支架的底部可拆卸安裝在機器人外殼部的頂部,氣象傳感器模塊包括雨量監測器、風速監測傳感器、風向監測傳感器和紫外線強度監測傳感器,雨量監測器、風速監測傳感器、風向監測傳感器和紫外線強度監測傳感器分別安裝在氣象監測支架上,并分別通過無線通信模塊與遠端服務器無線通信連接,棱鏡組件包括棱鏡支架和多個棱鏡,棱鏡支架的底部通過位置調整裝置可拆卸安裝在機器人外殼部的頂部,并通過位置調整裝置調整水平位置和朝向,多個棱鏡分別安裝在棱鏡支架上。
22、通過采用上述技術方案,外殼體組件在提供外罩的同時,提供檢修梯和氣象監測支架的安裝位,為測量機器人提供更穩定的測量場景保障,氣象傳感器模塊可以對監測位區域的雨量、與機器人配套,可同時監測風速、風向、降雨量等環境參數,還可以布置溫濕度傳感器、氣壓傳感器進行溫度、濕度、氣壓的監測,外殼材質采用抗氧化能力優于abs材料的asa材料;數據接口為標準rs485接口,支持modbus協助,無縫兼容測量機器人監測軟件。
23、基于測量機器人的一體化大壩監測站控制方法,采用基于測量機器人的一體化大壩監測站對大壩目標進行測量,包括以下步驟:
24、步驟1,測量全站儀完成并完成測量鏡頭對準大壩目標后,控制芯片分別控制三個位移發生監測組件同時開啟測量距離標準值,并存儲在存儲器分別記為sa1、sb1和sc1;
25、步驟2,測量全站儀對大壩目標的測量點進行監測測量;
26、步驟3,間隔五到十分鐘,控制芯片分別控制三個位移發生監測組件同時開啟位移發生測量,并存儲在存儲器分別記為sa2、sb2和sc2;
27、數據分析芯片分別計算距離測量值與距離標準值的差值,分別記為dsa1、dsb1和dsc1;dsa1=|sa2-sa1|,dsb1=|sb2-sb1|,dsc1=|sc2-sc1|;設定差值閾值dsx,數據分析芯片判斷若存在dsa1、dsb1和dsc1至少一個大于dsx,則向控制芯片交互需要進行位置補償的判斷結果,控制芯片進行步驟4,反之則不進行補充;每隔五到十分鐘重復步驟3;
28、步驟4,控制芯片根據步驟3差值計算結果生成控制平面位置調整機構的指令,平面位置調整機構的位置調整部動作,并同步重復步驟3進行差值計算,直到數據分析芯片分別計算距離測量值與距離標準值的差值均小于1mm。
29、可選的,若步驟4中經過平面位置調整機構的位置調整部動作后還存在距離測量值與距離標準值的差值大于等于1mm,則控制芯片控制高度調節機構的伸縮部每次向上或向下微調1mm,并數據分析芯片同步重復步驟3進行差值計算,并判斷差值變化趨勢,若差值變小,且均小于1mm,則完成位置補償,反之則數據分析芯片輸出異常位移的判斷結果,并通過無線通信模塊與遠端服務器通信警報。
30、綜上所述,本發明包括以下至少一種有益技術效果:
31、本發明能提供基于測量機器人的一體化大壩監測站及監測方法,為了應對大壩區域內的同步位移導致的測量全站儀區域與大壩目標區域同步位移導致的測量全站儀無法測得位移的發生,采用位移補償控制器分別控制三個位移發生監測組件每隔設定時間對測量全站儀的位置進行監測,根據監測結果,若出現輕微的位移偏差則需要對測量全站儀的位置進行位移補償調整,具體地采用位移補償裝置實現位置的調整,使測量全站儀測得的大壩目標監測點的位移量更加精準;能解決大壩區域內的同步位移導致的測量全站儀區域與大壩目標區域同步位移的大壩位移監測問題。
- 還沒有人留言評論。精彩留言會獲得點贊!