一種射線成像裝置的制作方法
本技術涉及射線成像領域,具體涉及一種射線成像裝置。
背景技術:
1、放射性射線成像的設備作為醫學數字成像中常見的一個成像系統,廣泛應用于體檢及常規醫學影像診斷領域。放射性射線成像的設備是一種利用放射性射線(例如x射線)透過被檢測者來進行成像的設備。
2、不妨以數字x射線攝影裝置(digital?radiography,dr)為例,由于其成像速度快、輻射劑量低、圖像清晰細膩以及全身皆可檢查等優勢,在臨床檢查上具有廣泛的應用,成為醫生進行疾病診斷的主要輔助手段之一。一般地,dr裝置具有機頭和探測器,機頭是用于發射x射線的部件,探測器是用于接收透過被檢測者的x射線的部件,探測器通過接收到的x射線并將其最終轉換為電信號以形成圖像;因此,在拍攝時探測器需要位于機頭所發射的x射線的“光路”上,并且,為了避免圖像有畸變等,一般還要求機頭與探測器對準。
3、如何實現機頭和探測器的相對位置處于期望的狀態,這是待解決的問題。
技術實現思路
1、考慮到上述問題,本技術提供一種射線成像裝置,下面具體說明。
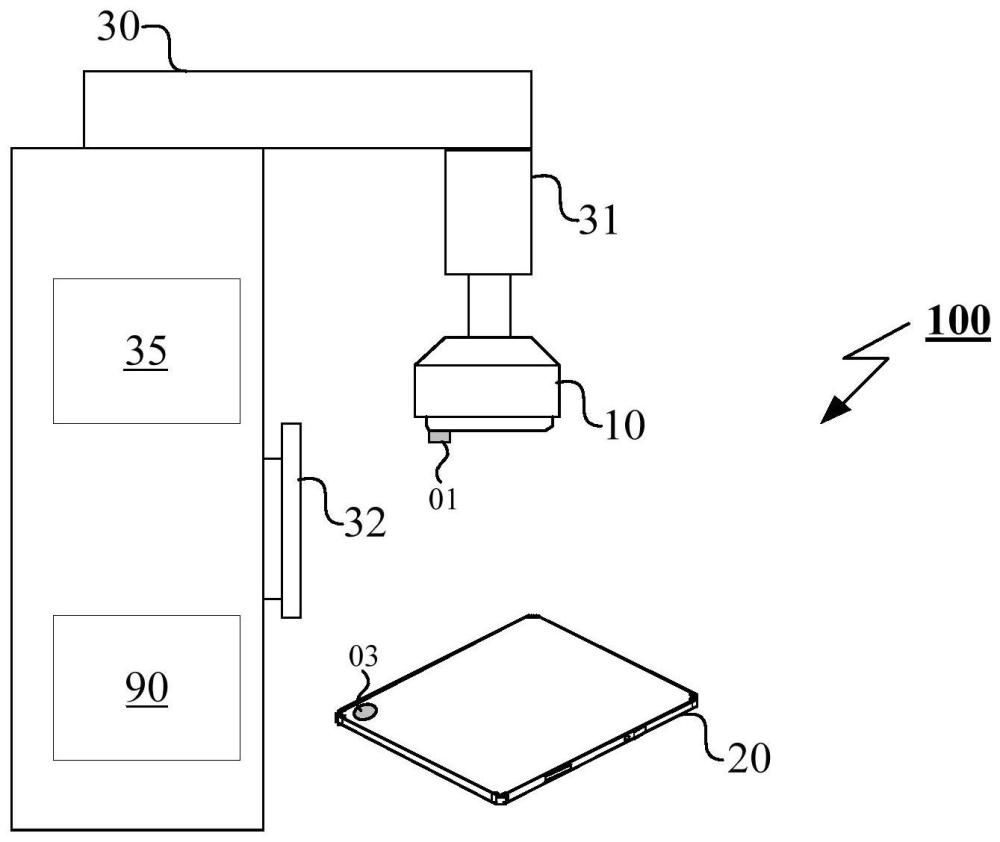
2、根據第一方面,一種移動式的射線成像裝置,包括:可移動機身、驅動組件、機頭和游離式的探測器;
3、所述可移動機身包括機身和移動組件,所述移動組件能夠帶動所述機身移動;
4、所述機頭用于產生射線;
5、所述探測器用于接收所述射線以進行成像;
6、所述機頭設置有至少一個基站,所述探測器設置有至少一個標簽;所述基站用于向所述標簽發射信號并接收由所述標簽返回的信號。
7、一實施例中,所述基站所發射和接收的信號用于計算所述基站與所述標簽的相對位置信息。
8、一實施例中,至少一個所述基站包括一個第一基站,所述第一基站具有至少兩根用于發射和接收信號的天線,兩根所述天線包括第一根天線和第二根天線;所述第一根天線用于向所述標簽發射信號并接收由所述標簽返回的信號,所述第二根天線用于向所述標簽發射信號并接收由所述標簽返回的信號。
9、一實施例中,所述第一根天線所發射和接收的信號用于計算所述第一根天線與所述標簽的第一相對距離;所述第一根天線所發射和接收的信號和所述第二根天線所發射和接收的信號用于計算第一信號相位差,其中所述第一信號相位差為所述第一根天線所接收的信號和所述第二根天線所接收的信號的相位差。
10、一實施例中,所述第一基站具有三根用于發射和接收信號的天線,三根所述天線包括所述第一根天線、所述第二根天線和第三根天線;所述第三根天線用于向所述標簽發射信號并接收由所述標簽返回的信號。
11、一實施例中,所述第一根天線所發射和接收的信號和所述第三根天線所發射和接收的信號用于計算第二信號相位差,其中所述第二信號相位差為所述第一根天線所接收的信號和所述第三根天線所接收的信號的相位差。
12、一實施例中,三根所述天線所發射和接收的信號用于計算所述第一基站與所述標簽的相對位置信息。
13、一實施例中,三根所述天線設置于所述第一基站的三個位點,三個所述位點按照直角三角形的三個頂點排布。
14、一實施例中,所述探測器設置有至少三個所述標簽。
15、一實施例中,三個所述標簽設置于所述探測器的三個位點,三個所述位點不在一條直線上。
16、一實施例中,所述探測器包括平板探測器,三個所述位點位于所述平板探測器的三個邊角。
17、一實施例中,所述射線成像裝置還包括驅動組件和支撐組件,所述支撐組件包括第一支撐結構,所述第一支撐結構設置于所述可移動機身,并與所述機頭連接,用于支撐所述機頭;所述驅動組件用于通過所述第一支撐結構驅動所述機頭運動;
18、或者,
19、所述射線成像裝置還包括支撐組件,所述支撐組件包括第一支撐結構,所述第一支撐結構設置于所述可移動機身,并與所述機頭連接,用于支撐所述機頭。
20、一實施例中,至少一個所述基站還包括一個第二基站;所述第二基站用于向所述標簽發射信號并接收由所述標簽返回的信號,所述第二基站所發射和接收的信號用于計算所述第二基站與所述標簽的相對位置信息。
21、一實施例中,至少一個所述基站還包括一個第二基站;所述第二基站用于向所述標簽發射信號并接收由所述標簽返回的信號,所述第二基站所發射和接收的信號用于計算所述第二基站與所述標簽的相對位置信息;所述第二基站的結構與所述第一基站的結構相同。
22、一實施例中,所述第一基站和所述第二基站之間的距離大于距離閾值。
23、一實施例中,所述相對位置信息包括相對距離和相對角度。
24、一實施例中,所述基站為uwb類型的基站,所述標簽為uwb類型的標簽。
25、根據第二方面,一種實施例提供一種射線成像裝置,包括:機頭、游離式的探測器、至少一個基站以及至少一個標簽;
26、所述機頭用于產生射線;
27、所述探測器用于接收所述射線以進行成像;
28、至少一個所述基站包括至少一個第一基站,所述第一基站用于向所述標簽發射信號并接收由所述標簽返回的信號,一個所述第一基站所發射和接收的信號用于計算該第一基站與所述標簽的相對位置信息,所述第一基站和所述標簽的位置設置使得:所述第一基站與所述標簽的相對位置信息能夠至少表征所述探測器的空間位置。
29、一實施例中,至少一個所述基站包括一個第一基站,所述第一基站具有至少兩根用于發射和接收信號的天線,兩根所述天線包括第一根天線和第二根天線;所述第一根天線用于向所述標簽發射信號并接收由所述標簽返回的信號,所述第二根天線用于向所述標簽發射信號并接收由所述標簽返回的信號。
30、一實施例中,所述第一根天線所發射和接收的信號用于計算所述第一根天線與所述標簽的第一相對距離;所述第一根天線所發射和接收的信號和所述第二根天線所發射和接收的信號用于計算第一信號相位差,其中所述第一信號相位差為所述第一根天線所接收的信號和所述第二根天線所接收的信號的相位差。
31、一實施例中,所述第一基站具有三根用于發射和接收信號的天線,三根所述天線包括所述第一根天線、所述第二根天線和第三根天線;所述第三根天線用于向所述標簽發射信號并接收由所述標簽返回的信號。
32、一實施例中,所述第一根天線所發射和接收的信號和所述第三根天線所發射和接收的信號用于計算第二信號相位差,其中所述第二信號相位差為所述第一根天線所接收的信號和所述第三根天線所接收的信號的相位差。
33、一實施例中,三根所述天線所發射和接收的信號用于計算所述第一基站與所述標簽的相對位置信息。
34、一實施例中,三根所述天線設置于所述第一基站的三個位點,三個所述位點按照直角三角形的三個頂點排布。
35、一實施例中,至少有一個所述第一基站設置于所述機頭或空間一固定位置,至少有一個所述標簽設置于所述探測器;或者,至少有一個所述標簽設置于所述機頭或空間一固定位置,至少有一個所述第一基站設置于所述探測器。
36、一實施例中,所述探測器設置有多個所述標簽。
37、一實施例中,所述探測器設置有至少三個所述標簽。
38、一實施例中,三個所述標簽設置于所述探測器的三個位點,三個所述位點不在一條直線上。
39、一實施例中,一個所述第一基站與設置于所述探測器的多個所述標簽的相對位置信息還能夠表征所述探測器的姿態信息。
40、一實施例中,所述探測器設置有多個所述第一基站。
41、一實施例中,所述探測器設置有三個所述第一基站。
42、一實施例中,三個所述第一基站設置于所述探測器的三個位點,三個所述位點不在一條直線上。
43、一實施例中,一個所述標簽與與設置于所述探測器的多個所述第一基站的相對位置信息還能夠表征所述探測器的姿態信息。
44、一實施例中,所述探測器包括平板探測器,三個所述位點位于所述平板探測器的三個邊角。
45、一實施例中,所述機頭設置有一個或多個所述標簽。
46、一實施例中,所述機頭設置有三個所述標簽,三個所述標簽設置于所述機頭的三個位點,三個所述位點不在一條直線上。
47、一實施例中,一個所述第一基站與設置于所述機頭的一個所述標簽的相對位置信息用于表征所述機頭的空間位置;和/或,一個所述第一基站與設置于所述機頭的多個所述標簽的相對位置信息用于表征所述機頭的姿態信息。
48、一實施例中,所述的射線成像裝置還包括驅動組件和支撐組件,所述支撐組件包括第一支撐結構和/或第二支撐結構,所述第一支撐結構與所述機頭連接,用于支撐所述機頭;所述驅動組件用于通過所述第一支撐結構驅動所述機頭運動;所述驅動組件還用于驅動所述第二支撐結構運動,在所述探測器放置于所述第二支撐結構時,所述第二支撐結構能夠帶動所述探測器運動;
49、或者,
50、所述的射線成像裝置還包括支撐組件,所述支撐組件包括第一支撐結構和/或第二支撐結構,所述第一支撐結構與所述機頭連接,用于支撐所述機頭;在所述探測器放置于所述第二支撐結構時,所述第二支撐結構能夠帶動所述探測器運動。
51、一實施例中,至少一個所述基站還包括一個第二基站;所述第二基站用于向所述標簽發射信號并接收由所述標簽返回的信號,所述第二基站所發射和接收的信號用于計算所述第二基站與所述標簽的相對位置信息。
52、一實施例中,所述第二基站設置于所述機頭、空間一固定位置或所述探測器。
53、一實施例中,所述第二基站的結構與所述第一基站的結構相同。
54、一實施例中,所述相對位置信息包括相對距離和相對角度。
55、一實施例中,所述基站為uwb類型的基站,所述標簽為uwb類型的標簽。
56、根據第三方面,一種實施例提供一種射線成像裝置,包括:機頭和游離式的探測器;
57、所述機頭用于產生射線;
58、所述探測器用于接收所述射線以進行成像;
59、所述機頭設置有至少一個基站,所述探測器設置有至少一個標簽;所述基站用于向所述標簽發射信號并接收由所述標簽返回的信號。
60、一實施例中,至少一個所述基站包括一個第一基站,所述第一基站所發射和接收的信號用于計算所述第一基站與所述標簽的相對位置信息,所述相對位置信息包括相對距離和相對角度。
61、一實施例中,所述探測器設置有至少三個所述標簽。
62、一實施例中,三個所述標簽設置于所述探測器的三個位點,三個所述位點不在一條直線上。
63、根據第四方面,一種實施例提供一種射線成像裝置,包括:機頭、游離式的探測器、游離式的輔助裝置、至少一個基站以及至少一個標簽;
64、所述機頭用于產生射線;
65、所述探測器用于接收所述射線以進行成像;
66、所述輔助裝置用于在所述探測器接收所述射線的過程中放置所述探測器;
67、至少一個所述基站包括至少一個第一基站,所述第一基站用于向所述標簽發射信號并接收由所述標簽返回的信號;一個所述第一基站所發射和接收的信號用于計算該第一基站與所述標簽的相對位置信息,所述第一基站和所述標簽的位置設置使得:所述第一基站與所述標簽的相對位置信息能夠至少表征所述輔助裝置的空間位置。
68、一實施例中,至少一個所述基站包括一個第一基站,所述第一基站具有至少兩根用于發射和接收信號的天線,兩根所述天線包括第一根天線和第二根天線;所述第一根天線用于向所述標簽發射信號并接收由所述標簽返回的信號,所述第二根天線用于向所述標簽發射信號并接收由所述標簽返回的信號。
69、一實施例中,所述第一根天線所發射和接收的信號用于計算所述第一根天線與所述標簽的第一相對距離;所述第一根天線所發射和接收的信號和所述第二根天線所發射和接收的信號用于計算第一信號相位差,其中所述第一信號相位差為所述第一根天線所接收的信號和所述第二根天線所接收的信號的相位差。
70、一實施例中,所述第一基站具有三根用于發射和接收信號的天線,三根所述天線包括所述第一根天線、所述第二根天線和第三根天線;所述第三根天線用于向所述標簽發射信號并接收由所述標簽返回的信號。
71、一實施例中,所述第一根天線所發射和接收的信號和所述第三根天線所發射和接收的信號用于計算第二信號相位差,其中所述第二信號相位差為所述第一根天線所接收的信號和所述第三根天線所接收的信號的相位差。
72、一實施例中,三根所述天線所發射和接收的信號用于計算所述第一基站與所述標簽的相對位置信息。
73、一實施例中,三根所述天線設置于所述第一基站的三個位點,三個所述位點按照直角三角形的三個頂點排布。
74、一實施例中,至少有一個所述第一基站設置于所述機頭或空間一固定位置,至少有一個所述標簽設置于所述輔助裝置;或者,至少有一個所述標簽設置于所述機頭或空間一固定位置,至少有一個所述第一基站設置于所述輔助裝置。
75、一實施例中,所述輔助裝置設置有多個所述標簽。
76、一實施例中,所述輔助裝置設置有至少三個所述標簽。
77、一實施例中,三個所述標簽設置于所述輔助裝置的三個位點,三個所述位點不在一條直線上。
78、一實施例中,一個所述第一基站與設置于所述輔助裝置的多個所述標簽的相對位置信息還能夠表征所述輔助裝置的姿態信息。
79、一實施例中,所述輔助裝置設置有多個所述第一基站。
80、一實施例中,所述輔助裝置設置有三個所述第一基站。
81、一實施例中,三個所述第一基站設置于所述輔助裝置的三個位點,三個所述位點不在一條直線上。
82、一實施例中,一個所述標簽與與設置于所述輔助裝置的多個所述第一基站的相對位置信息還能夠表征所述輔助裝置的姿態信息。
83、三個所述位點位于所述輔助裝置的三個邊角。
84、一實施例中,所述機頭設置有一個或多個所述標簽。
85、一實施例中,所述機頭設置有三個所述標簽,三個所述標簽設置于所述機頭的三個位點,三個所述位點不在一條直線上。
86、一實施例中,一個所述第一基站與設置于所述機頭的一個所述標簽的相對位置信息用于表征所述機頭的空間位置;和/或,一個所述第一基站與設置于所述機頭的多個所述標簽的相對位置信息用于表征所述機頭的姿態信息。
87、一實施例中,所述的射線成像裝置還包括驅動組件和支撐組件,所述支撐組件包括第一支撐結構和/或第二支撐結構,所述第一支撐結構與所述機頭連接,用于支撐所述機頭;所述驅動組件用于通過所述第一支撐結構驅動所述機頭運動;所述驅動組件還用于驅動所述第二支撐結構運動,在所述探測器放置于所述第二支撐結構時,所述第二支撐結構能夠帶動所述探測器運動;
88、或者,
89、所述的射線成像裝置還包括支撐組件,所述支撐組件包括第一支撐結構和/或第二支撐結構,所述第一支撐結構與所述機頭連接,用于支撐所述機頭;在所述探測器放置于所述第二支撐結構時,所述第二支撐結構能夠帶動所述探測器運動;所述控制器基于所述相對位置信息提示給用戶,以使得用戶控制所述機頭和/或所述探測器運動以使所述機頭與所述探測器滿足預設的位置關系。
90、一實施例中,至少一個所述基站還包括一個第二基站;所述第二基站用于向所述標簽發射信號并接收由所述標簽返回的信號,所述第二基站所發射和接收的信號用于計算所述第二基站與所述標簽的相對位置信息。
91、一實施例中,所述第二基站設置于所述機頭、空間一固定位置或所述輔助裝置。
92、一實施例中,所述第二基站的結構與所述第一基站的結構相同。
93、一實施例中,所述相對位置信息包括相對距離和相對角度。
94、一實施例中,所述基站為uwb類型的基站,所述標簽為uwb類型的標簽。
95、依據上述實施例的射線成像裝置,通過引入游離式的探測器,可以不局限于特定位置而放置游離式的探測器,使得探測器能夠在多個位置進行拍攝工作,有效地擴展了射線成像裝置的應用場景;進一步地,通過引入基站和標簽來對游離式的探測器進行定位,為游離式的探測器的定位提供了硬件基礎,這為射線成像裝置完成機頭和游離式的探測器的位置匹配(例如使得兩者滿足預設的位置關系)提供了基礎。
- 還沒有人留言評論。精彩留言會獲得點贊!