手部訓練數據處理方法、裝置、電子設備及存儲介質與流程
本技術涉及機器人,具體涉及一種手部訓練數據處理方法、裝置、電子設備及存儲介質。
背景技術:
1、手功能康復訓練器械是一種手部康復訓練器械,用于輔助具有手功能使用障礙的患者進行康復訓練。患者在使用現有的手功能康復訓練器械進行康復訓練時,都是采用其預配置的方案進行訓練,只能進行固有內容訓練,無法對患者的需求針對性進行輔助訓練,訓練效果不佳。
技術實現思路
1、本技術實施例提供了一種手部訓練數據處理方法、裝置、電子設備及存儲介質,以期提高服務器對訓練數據處理的智能性和靈活性,提高用戶采用手功能康復訓練器械進行抓握訓練的成功率,優化康復訓練效果。
2、第一方面,本技術實施例提供了一種手部訓練數據處理方法,應用于手功能訓練系統的服務器,所述手功能訓練系統包括所述服務器、用戶設備和手功能康復訓練器械,所述服務器與所述用戶設備通信連接,所述用戶設備與所述手功能康復訓練器械通信連接,所述方法包括:
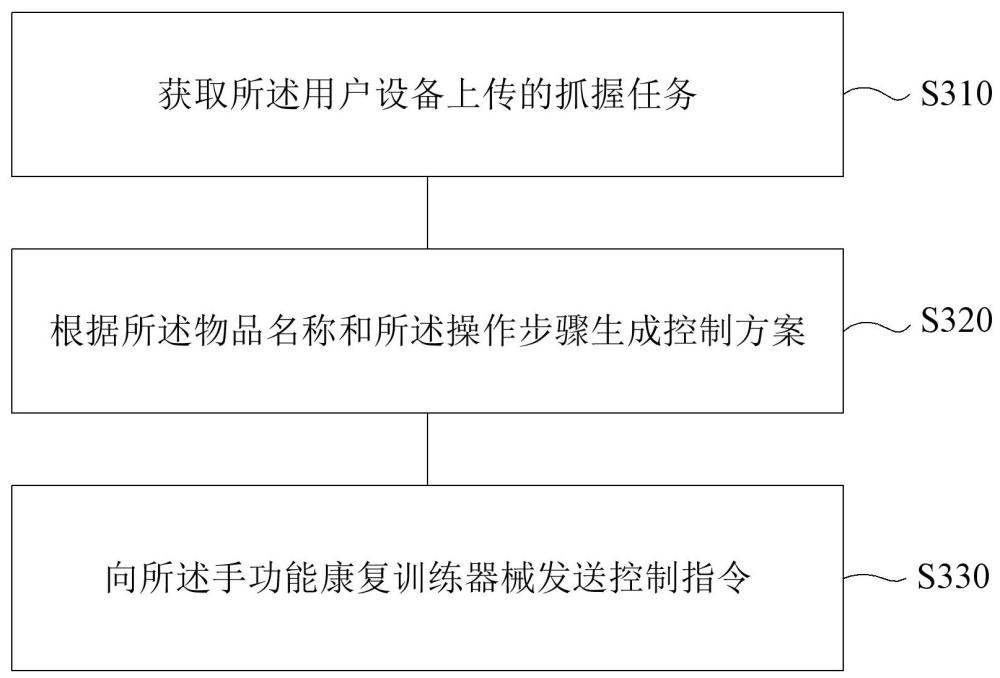
3、獲取所述用戶設備上傳的抓握任務,所述抓握任務攜帶有待抓握物品的物品名稱和針對所述待抓握物品的操作步驟,所述操作步驟用于表征用戶需要執行的操作;
4、根據所述物品名稱和所述操作步驟生成控制方案,所述控制方案用于控制所述手功能康復訓練器械上各個關節的活動方向和調節角度;
5、向所述手功能康復訓練器械發送控制指令,所述控制指令用于指示所述手功能康復訓練器械根據所述控制方案運行而完成針對所述待抓握物品的抓握動作和所述操作步驟。
6、在第一方面的一個可能的示例中,所述根據所述物品名稱和所述操作步驟生成控制方案,包括:
7、獲取所述手功能康復訓練器械對應的當前抓握手型中用于抓握所述待抓握物品的目標抓握關節和所述目標抓握關節的當前位置;
8、根據所述目標抓握關節的當前位置確定所述待抓握物品的大小;
9、根據所述物品名稱獲取所述待抓握物品的標準重量;
10、根據所述待抓握物品的大小和所述標準重量生成所述控制方案。
11、在第一方面的一個可能的示例中,所述根據所述目標抓握關節的當前位置確定所述待抓握物品的大小,包括:
12、確定在獲取到所述抓握任務后的預設時段內是否獲取到所述用戶設備上傳的調節任務;
13、若未獲取到,則確定所述目標抓握關節在所述當前位置的第一角度信息,并根據所述第一角度信息確定所述待抓握物品的大小,角度信息包括所述目標抓握關節對應的目標角度和目標方向;
14、若獲取到,則根據所述調節任務向所述手功能康復訓練器械發送調整指令,所述調整指令用于指示所述目標抓握關節不斷增大角度運行,以逐漸調節縮短所述目標抓握關節和所述待抓握物品之間的間距;
15、在獲取到所述用戶設備上傳的暫停任務時向所述手功能康復訓練器械發送停止指令,所述停止指令用于指示所述目標抓握關節停止調節;
16、獲取所述目標抓握關節停止調節時對應的第二角度信息;
17、根據所述第二角度信息確定所述待抓握物品的大小。
18、在第一方面的一個可能的示例中,所述根據所述物品名稱和所述操作步驟生成控制方案,還包括:
19、根據所述操作步驟確定推薦抓握手型;
20、比對所述推薦抓握手型和所述當前抓握手型是否一致;
21、若一致,則根據所述當前抓握手型生成所述控制方案;
22、若不一致,則根據所述當前抓握手型和所述推薦抓握手型生成所述控制方案。
23、在第一方面的一個可能的示例中,所述根據所述當前抓握手型和所述推薦抓握手型生成所述控制方案,包括:
24、比對所述推薦抓握手型和所述當前抓握手型確定目標調節關節;
25、確定所述當前抓握手型中目標調節關節的當前位置和所述目標調節關節與所述推薦抓握手型對應的目標調節位置;
26、根據所述目標調節關節的當前位置和所述目標調節位置生成所述控制方案。
27、在第一方面的一個可能的示例中,所述向所述手功能康復訓練器械發送控制指令之后,所述方法包括:
28、獲取手功能康復訓練器械的抓握歷史,所述抓握歷史包括所述手功能康復訓練器械執行所述控制方案的訓練記錄;
29、根據所述抓握歷史更新數據庫中的推薦方案,所述推薦方案包括訓練手型、與所述訓練手型對應的訓練物品以及和所述訓練物品對應的關節角度;
30、在針對所述訓練手型進行無實物訓練時向所述手功能康復訓練器械發送所述推薦方案。
31、在第一方面的一個可能的示例中,所述根據所述抓握歷史更新數據庫中的推薦方案,包括:
32、根據所述抓握歷史確定實際抓握訓練中所述訓練手型抓握最多的物品為所述訓練物品;
33、根據所述抓握歷史確定所述訓練手型針對所述訓練物品的關節角度;
34、根據所述訓練手型、所述訓練物品以及所述關節角度更新所述數據庫中針對所述訓練手型的所述推薦方案。
35、第二方面,本技術實施例提供了一種手部訓練數據處理裝置,應用于手功能訓練系統的服務器,所述手功能訓練系統包括所述服務器、用戶設備和手功能康復訓練器械,所述服務器與所述用戶設備通信連接,所述用戶設備與所述手功能康復訓練器械通信連接,所述手部訓練數據處理裝置,包括:
36、獲取單元,用于獲取所述用戶設備上傳的抓握任務,所述抓握任務攜帶有待抓握物品的物品名稱和針對所述待抓握物品的操作步驟,所述操作步驟用于表征用戶需要執行的操作;
37、生成單元,用于根據所述物品名稱和所述操作步驟生成控制方案,所述控制方案用于控制所述手功能康復訓練器械上各個關節的活動方向和調節角度;
38、發送單元,用于向所述手功能康復訓練器械發送控制指令,所述控制指令用于指示所述手功能康復訓練器械根據所述控制方案運行而完成針對所述待抓握物品的抓握動作和操作步驟。
39、第三方面,本技術實施例提供了一種電子設備,包括處理器、存儲器、通信接口,以及一個或多個程序,所述一個或多個程序被存儲在所述存儲器中,并且被配置由所述處理器執行,所述程序包括用于執行本技術實施例第一方面中的步驟的指令。
40、第四方面,本技術實施例提供了一種計算機可讀存儲介質,存儲用于電子數據交換的計算機程序,其中,所述計算機程序使得計算機執行如本實施例第一方面中所描述的部分或全部步驟。
41、可以看出,本實施例中,服務器可以通過獲取用戶設備上傳的抓握任務,抓握任務攜帶有待抓握物品的物品名稱和針對待抓握物品的操作步驟,操作步驟用于表征用戶需要執行的操作;根據物品名稱和操作步驟生成控制方案,控制方案用于控制手功能康復訓練器械上各個關節的活動方向和調節角度;向手功能康復訓練器械發送控制指令,控制指令用于指示手功能康復訓練器械根據控制方案運行而完成針對待抓握物品的抓握動作和操作步驟。可見,本技術可以在執行抓握任務時,根據用戶設備上傳的待抓握物品的物品名稱和操作步驟生成用于控制手功能康復訓練器械上各個關節的活動方向和調節角度的控制方案,以指示手功能康復訓練器械根據控制方案輔助患者抓握待抓握物品進行康復訓練,如此有利于提高服務器對抓握訓練數據處理的智能性,從而提高控制方案和待抓握物品的適配度,進而提高用戶采用手功能康復訓練器械進行抓握訓練的成功率,優化康復訓練效果。
- 還沒有人留言評論。精彩留言會獲得點贊!