一種基于模型補償電子機械制動系統電機轉角校正方法與流程
本發明屬于車輛,具體涉及一種基于模型補償電子機械制動系統電機轉角校正方法。
背景技術:
1、通常車輛上會安裝電機,電機可以用于車輛的制動。在電機的foc(fieldoriented?control,磁場定向控制)控制過程中,需要使用當前電機的轉角。由于角度信號的采集、計算以及控制信號輸出之間存在不可消除的時間差,因此電機轉速較高時,控制時使用的轉速信號存在誤差。目前的方法是根據電機前一周期的轉速和控制步長的乘積進行校正。但是電機轉速信號在控制步長時間內也是變化的,因此通過上述方式進行校正后的轉角仍然會存在一定的誤差,準確率較低。
技術實現思路
1、本發明的一個目的是提供一種基于模型補償電子機械制動系統電機轉角校正方法,能夠解決現有技術中對電機的轉角進行校正后準確率較低的技術問題。
2、根據本發明的第一方面,提供了一種基于模型補償電子機械制動系統電機轉角校正方法,所述方法包括:
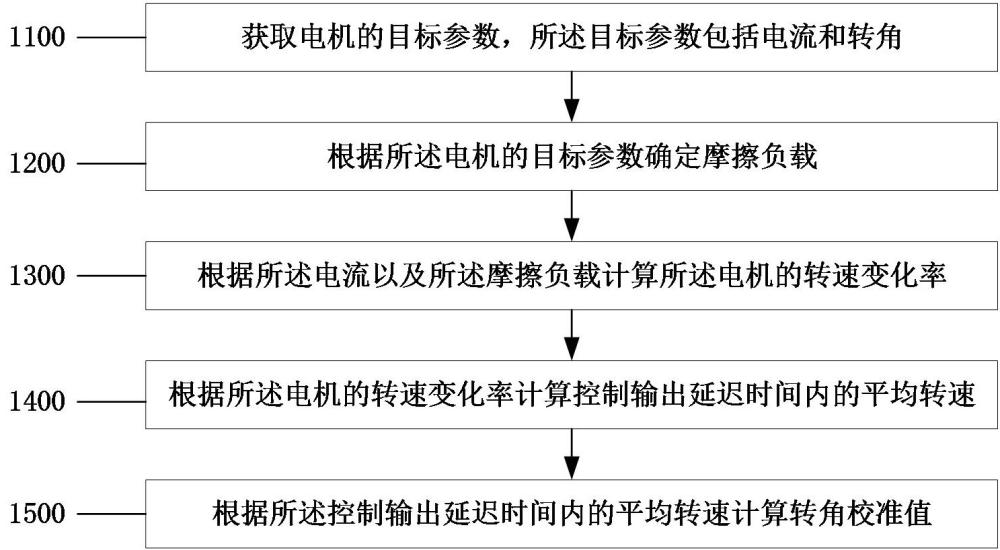
3、獲取電機的目標參數,所述目標參數包括電流和轉角;
4、根據所述電機的目標參數確定摩擦負載;
5、根據所述電流以及所述摩擦負載計算所述電機的轉速變化率;
6、根據所述電機的轉速變化率計算控制輸出延遲時間內的平均轉速;
7、根據所述控制輸出延遲時間內的平均轉速計算轉角校準值。
8、可選地,所述根據所述電機的目標參數確定摩擦負載,包括:
9、對所述電機進行碰盤檢測;
10、若未出現碰盤,使用固定摩擦負載;
11、若出現碰盤,根據制動系統模型計算摩擦負載。
12、可選地,所述根據制動系統模型計算摩擦負載,包括:
13、根據所述電機的轉角計算制動夾緊力,計算公式如下:
14、;
15、其中,為制動夾緊力,、、為系統剛度常數,為所述電機的轉角;
16、根據所述制動夾緊力計算施加到絲桿的負載扭矩,計算公式如下:
17、;
18、其中,為施加到絲桿的負載扭矩,為絲桿導程常數,為絲桿效率常數,為制動夾緊力;
19、根據所述施加到絲桿的負載扭矩計算施加到電機軸的負載扭矩,計算公式如下:
20、;
21、其中,為施加到電機軸的負載扭矩,為施加到絲桿的負載扭矩,為減速機構減速比常數,為減速機構效率常數。
22、可選地,所述根據所述電流以及所述摩擦負載計算所述電機的轉速變化率,包括:
23、根據所述電機的電流計算所述電機的驅動扭矩,計算公式如下:
24、;
25、其中,為所述電機的驅動扭矩,為所述電機的扭矩常數,為所述電機的電流;
26、根據所述電機的驅動扭矩以及所述電機的摩擦負載計算所述電機的轉速變化率,計算公式如下:
27、;
28、其中,為所述電機的轉速變化率,為所述電機的驅動扭矩,為施加到電機軸的負載扭矩,為總摩擦轉矩常數,為系統總轉動慣量常數。
29、可選地,所述根據所述電機轉速變化率計算控制輸出延遲時間內的平均轉速,包括:
30、根據所述電機的目標參數計算所述電機的轉速;
31、根據如下公式計算所述控制輸出延遲時間內的平均轉速:
32、;
33、其中,為所述控制輸出延遲時間內的平均轉速,為固定延遲時間,為所述電機的轉速,為所述電機的轉速變化率。
34、可選地,所述根據所述控制輸出延遲時間內的平均轉速計算轉角校準值,包括:
35、根據如下公式計算所述轉角校準值:
36、;
37、其中,為轉角校準值,為所述電機的轉角,為所述控制輸出延遲時間內的平均轉速,為固定延遲時間。
38、根據本發明的第二方面,提供了一種基于模型補償電子機械制動系統電機轉角校正裝置,包括:
39、獲取模塊,用于獲取電機的目標參數,所述目標參數包括電流和轉角;
40、第一計算模塊,用于根據所述電機的目標參數確定摩擦負載;
41、第二計算模塊,用于根據所述電流以及所述摩擦負載計算所述電機的轉速變化率;
42、第三計算模塊,用于根據所述電機的轉速變化率計算控制輸出延遲時間內的平均轉速;
43、第四計算模塊,用于根據所述控制輸出延遲時間內的平均轉速計算轉角校準值。
44、根據本發明的第三方面,提供了一種電子設備,包括處理器和存儲器,所述存儲器存儲可在所述處理器上運行的程序或指令,所述程序或指令被所述處理器執行時實現如本發明第一方面所述的一種基于模型補償電子機械制動系統電機轉角校正方法的步驟。
45、根據本發明的第四方面,提供了一種車輛,包括本發明第三方面所述的一種電子設備。
46、根據本發明的第五方面,提供了一種可讀存儲介質,所述可讀存儲介質上存儲程序或指令,所述程序或指令被處理器執行時實現如本發明第一方面所述的一種基于模型補償電子機械制動系統電機轉角校正方法的步驟。
47、本發明的有益效果在于:本發明考慮到電機轉速信號在控制步長時間內也是變化的,因此通過系統動力學模型計算電機的轉速變化率,根據電機的轉速變化率在控制步長時間內積分,得到更加準確的校正角。
技術特征:
1.一種基于模型補償電子機械制動系統電機轉角校正方法,其特征在于,所述方法包括:
2.根據權利要求1所述的方法,其特征在于,所述根據所述電機的目標參數確定摩擦負載,包括:
3.根據權利要求2所述的方法,其特征在于,所述根據制動系統模型計算摩擦負載,包括:
4.根據權利要求3所述的方法,其特征在于,所述根據所述電流以及所述摩擦負載計算所述電機的轉速變化率,包括:
5.根據權利要求4所述的方法,其特征在于,所述根據所述電機轉速變化率計算控制輸出延遲時間內的平均轉速,包括:
6.根據權利要求5所述的方法,其特征在于,所述根據所述控制輸出延遲時間內的平均轉速計算轉角校準值,包括:
7.一種基于模型補償電子機械制動系統電機轉角校正裝置,其特征在于,包括:
8.一種電子設備,其特征在于,包括處理器和存儲器,所述存儲器存儲可在所述處理器上運行的程序或指令,所述程序或指令被所述處理器執行時實現如權利要求1至6任一項所述的一種基于模型補償電子機械制動系統電機轉角校正方法的步驟。
9.一種車輛,其特征在于,包括權利要求8所述的一種電子設備。
10.一種可讀存儲介質,其特征在于,所述可讀存儲介質上存儲程序或指令,所述程序或指令被處理器執行時實現如權利要求1至6任一項所述的一種基于模型補償電子機械制動系統電機轉角校正方法的步驟。
技術總結
本發明公開了一種基于模型補償電子機械制動系統電機轉角校正方法,所述方法包括:獲取電機的目標參數,所述目標參數包括電流和轉角;根據所述電機的目標參數確定摩擦負載;根據所述電流以及所述摩擦負載計算所述電機的轉速變化率;根據所述電機的轉速變化率計算控制輸出延遲時間內的平均轉速;根據所述控制輸出延遲時間內的平均轉速計算轉角校準值。本發明考慮到電機轉速信號在控制步長時間內也是變化的,因此通過系統動力學模型計算電機的轉速變化率,根據電機的轉速變化率在控制步長時間內積分,得到更加準確的校正角。
技術研發人員:劉長運,鄭利水,范凱新,宋京洋,馬銳,段珍珍
受保護的技術使用者:萬向錢潮股份公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!