一種全自動化光伏清潔機器人及其使用方法與流程
本發明屬于光伏板清潔,具體公開了一種全自動化光伏清潔機器人及其使用方法。
背景技術:
1、光伏板的清潔對其性能和長期使用至關重要。首先,定期清洗光伏板可以提高發電效率。光伏板表面積聚的灰塵和污垢會阻擋陽光直射到光伏板上,?從而減少光電轉換效率。通過清洗可以去除這些遮擋物,使光伏板能夠更好地吸收陽光,從而提高發電效率。而以往通過人工清洗主要是通過使用長柄絨拖或軟毛刷清理光伏板表面的灰塵和污垢。而現有技術中,通過光伏板清潔機器人對其進行清理,大大提高清潔效率。但是面對冬季積雪覆蓋一定程度時,不易直接清掃,而現有的清潔機器人基本適用于正常的方形光伏板,例如在面對表面為弧形的光伏板時,以往的清潔機器人在弧形有坡度的光伏板表面移動易打滑,以及通過滑軌移動的清潔機器人基礎為直線移動,便不能有效進行清潔處理。
技術實現思路
1、本發明的目的是為了解決現有技術中存在的缺點,而提出的一種全自動化光伏清潔機器人及其使用方法。
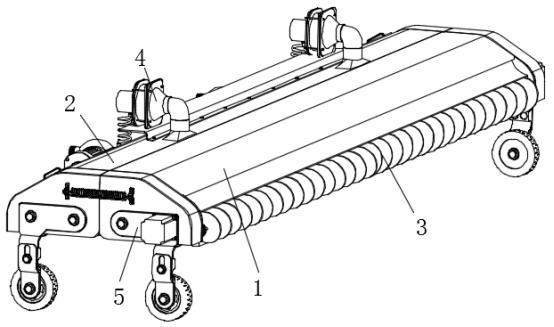
2、為達到以上目的,本發明提供了一種全自動化光伏清潔機器人,包括清潔室,所述清潔室的后側轉動設置有氣動室,所述清潔室的內側設置有清潔組件,所述氣動室的內側設置有處理組件,所述清潔室與氣動室的兩側均設置有變化組件,所述清潔組件包括轉動設置在清潔室內側的清潔輥,所述清潔室的內部靠近前側位置活動設置有后殼,所述后殼的上側固定設置有遮擋殼,所述清潔室的前側對應遮擋殼的位置開設有開口,所述后殼的內側轉動設置有螺旋輥,所述后殼的兩側均固定設置有活動板,兩組所述活動板相對一端均固定設置有一號電機,所述清潔室的兩側內壁均固定設置有一號固定軸,所述清潔室的兩側內壁與兩組活動板的上側均固定設置有一號連接軸,四組所述一號連接軸之間活動設置有兩組液壓缸,所述清潔輥與螺旋輥的兩側以及兩組一號電機轉動軸一側均固定設置有一號同步輪,所述清潔輥、螺旋輥、一號電機上設置的一號同步輪外側套有同步齒形帶。
3、在上述技術方案中,優選的,所述處理組件包括固定設置在氣動室上端的兩組支撐架,所述支撐架的上端固定設置有兩組吸塵泵,所述氣動室的前側內部設置有吸塵腔,所述氣動室的中間位置設置有收集腔,所述氣動室的后側設置有吹氣腔,所述收集腔的上側安裝有蓋板,所述氣動室的后端固定設置有兩組氣泵,所述吸塵腔的下端設置有抽氣口,所述吹氣腔的下側固定設置有若干組導風板。
4、在上述技術方案中,優選的,所述變化組件包括固定設置在清潔室與氣動室兩端的四組側殼,所述清潔室與氣動室一側兩組側殼的一端均固定設置有二號連接軸,兩組所述二號連接軸之間套有一號雙鉤彈簧,兩組所述側殼的一端均固定設置有固定板,兩組所述固定板的下側均固定設置有輪架,兩組所述輪架的一側均轉動設置有一號輪,兩組所述固定板的下側均活動設置有兩組側滾珠,兩組所述側殼的內側均轉動設置有二號輪,兩組所述二號輪的轉動軸一側均固定設置有二號同步輪,兩組側殼的內側均固定設置有二號固定軸,兩組所述二號固定軸的外側均活動設置有連接桿,兩組所述連接桿的相背的一側均轉動設置有輔助輪,兩組所述二號同步輪外側與兩組輔助輪之間套有同步皮帶,兩組所述側殼的上側內壁均固定設置有三號連接軸,兩組所述三號連接軸與兩組連接桿之間均套有二號雙鉤彈簧,兩組所述固定板中靠近清潔室的一組一端固定設置有二號電機。
5、在上述技術方案中,優選的,所述清潔輥高于螺旋輥的位置,所述后殼與螺旋輥相適配,所述開口適配于遮擋殼轉動。
6、在上述技術方案中,優選的,所述螺旋輥設置為相反的兩段,所述活動板的前后側為傾斜設置,所述一號固定軸與活動板為活動連接。
7、在上述技術方案中,優選的,所述吸塵泵的吸塵端與吸塵腔的內部相通,所述吸塵泵的出塵端與蓋板固定設置,所述氣泵的出氣端與吹氣腔內部相通,所述氣泵的進氣端固定設置有粉塵濾網,若干組所述導風板分別向兩側傾斜設置。
8、在上述技術方案中,優選的,兩組所述側殼與內外結構為鏡面對稱設置,所述一號輪與二號輪對齊,所述輔助輪壓持在同步皮帶的上側。
9、在上述技術方案中,所述二號雙鉤彈簧為拉伸狀態,所述二號電機轉動軸穿過固定板、側殼內部與二號輪固定設置。
10、還提供一種全自動化光伏清潔機器人的使用方法,用于操作一種全自動化光伏清潔機器人,包括以下步驟:
11、s1:通過二號電機整體在光伏板框架上進行移動,而清潔室與氣動室的轉動設置,在面對弧形的光伏板時,自動進行角度變化,同時二號雙鉤彈簧拉動連接桿,滿足驅動工作,有效對兩種光伏板進行清潔工作;
12、s2:通過一號電機驅動清潔輥與螺旋輥進行旋轉工作,配合兩組液壓缸的驅動,對前后側的清潔輥與螺旋輥切換,對光伏板表面的灰塵進行清潔,以及對堆積的雪向兩側輸送,避免堆積在螺旋輥的前側產生的阻力對移動的影響;
13、s3:在清潔輥工作時,通過吸塵泵的使用,對清潔輥清潔后殘留的灰塵進行吸取收集工作,而清潔輥設置在清潔室內部清潔工作,立馬由抽氣口吸塵工作,減少灰塵在設備外進行胡亂飛舞。
14、與現有技術相比,本發明具有以下有益效果:
15、1、將兩側的一號輪、二號輪與兩組側滾珠分別夾持在光伏板框架兩側安裝,而工作時,通過二號電機帶動連接的二號輪、二號同步輪進行轉動,?配合套接的同步皮帶驅動連接的另一組二號同步輪、二號輪在光伏板框架上進行橫向直線移動,而清潔室與氣動室的轉動設置,在面對弧形的光伏板時,相互之間進行轉動,使得兩組二號連接軸拉動一號雙鉤彈簧,能夠在面對弧形光伏板時,自動進行角度變化,同時清潔室與氣動室相互轉動時,兩組二號同步輪則會向下轉動靠攏,而二號雙鉤彈簧拉動連接桿沿著二號固定軸轉動,滿足同步皮帶在兩組二號同步輪位置變化時,兩組輔助輪會一直壓持在同步皮帶上進行預緊,滿足對兩組二號同步輪、二號輪進行傳動工作,適配于弧形光伏板上驅動工作,有效對兩種光伏板進行清潔工作。
16、2、通過一號電機驅動連接的一號同步輪帶動套接的同步齒形帶進行旋轉,分別驅動另兩組一號同步輪進行旋轉,同時驅動清潔輥與螺旋輥進行旋轉工作,而通過兩組液壓缸的驅動,會推動兩側的兩組活動板分別沿著兩組一號固定軸進行轉動,可對前后側的清潔輥與螺旋輥上下側位置切換,而旋轉的清潔輥可對光伏板表面的灰塵進行清潔,而旋轉的螺旋輥配合后殼的使用,可對堆積的雪鏟起,同時相反設置的兩段螺旋輥,可將雪向兩側輸送,避免堆積在螺旋輥的前側產生的阻力對移動的影響,可根據不同清潔情況進行工作。
17、3、在清潔輥工作時,可通過吸塵泵的使用,由抽氣口對清潔輥清潔后殘留的灰塵進行吸取,再排入收集腔的內部進行收集工作,而清潔輥設置在清潔室內部清潔工作,立馬由抽氣口吸塵工作,減少灰塵在設備外進行胡亂飛舞,避免設備在移動后,飛舞的灰塵再次落到光伏板上,而螺旋輥在工作時,可通過兩組氣泵配合若干組導風板的使用,向兩側進行傾斜吹式殘留的積雪,提高清潔效果。
技術特征:
1.一種全自動化光伏清潔機器人,包括清潔室(1),其特征在于:所述清潔室(1)的后側轉動設置有氣動室(2),所述清潔室(1)的內側設置有清潔組件(3),所述氣動室(2)的內側設置有處理組件(4),所述清潔室(1)與氣動室(2)的兩側均設置有變化組件(5),所述清潔組件(3)包括轉動設置在清潔室(1)內側的清潔輥(31),所述清潔室(1)的內部靠近前側位置活動設置有后殼(32),所述后殼(32)的上側固定設置有遮擋殼(33),所述清潔室(1)的前側對應遮擋殼(33)的位置開設有開口(34),所述后殼(32)的內側轉動設置有螺旋輥(35),所述后殼(32)的兩側均固定設置有活動板(36),兩組所述活動板(36)相對一端均固定設置有一號電機(37),所述清潔室(1)的兩側內壁均固定設置有一號固定軸(38),所述清潔室(1)的兩側內壁與兩組活動板(36)的上側均固定設置有一號連接軸(39),四組所述一號連接軸(39)之間活動設置有兩組液壓缸(310),所述清潔輥(31)與螺旋輥(35)的兩側以及兩組一號電機(37)轉動軸一側均固定設置有一號同步輪(311),所述清潔輥(31)、螺旋輥(35)、一號電機(37)上設置的一號同步輪(311)外側套有同步齒形帶(312)。
2.根據權利要求1所述的一種全自動化光伏清潔機器人,其特征在于:所述處理組件(4)包括固定設置在氣動室(2)上端的兩組支撐架(41),所述支撐架(41)的上端固定設置有兩組吸塵泵(42),所述氣動室(2)的前側內部設置有吸塵腔(43),所述氣動室(2)的中間位置設置有收集腔(44),所述氣動室(2)的后側設置有吹氣腔(45),所述收集腔(44)的上側安裝有蓋板(46),所述氣動室(2)的后端固定設置有兩組氣泵(47),所述吸塵腔(43)的下端設置有抽氣口(48),所述吹氣腔(45)的下側固定設置有若干組導風板(49)。
3.根據權利要求1所述的一種全自動化光伏清潔機器人,其特征在于:所述變化組件(5)包括固定設置在清潔室(1)與氣動室(2)兩端的四組側殼(51),所述清潔室(1)與氣動室(2)一側兩組側殼(51)的一端均固定設置有二號連接軸(52),兩組所述二號連接軸(52)之間套有一號雙鉤彈簧(53),兩組所述側殼(51)的一端均固定設置有固定板(54),兩組所述固定板(54)的下側均固定設置有輪架(55),兩組所述輪架(55)的一側均轉動設置有一號輪(56),兩組所述固定板(54)的下側均活動設置有兩組側滾珠(57),兩組所述側殼(51)的內側均轉動設置有二號輪(58),兩組所述二號輪(58)的轉動軸一側均固定設置有二號同步輪(59),兩組側殼(51)的內側均固定設置有二號固定軸(510),兩組所述二號固定軸(510)的外側均活動設置有連接桿(511),兩組所述連接桿(511)的相背的一側均轉動設置有輔助輪(512),兩組所述二號同步輪(59)外側與兩組輔助輪(512)之間套有同步皮帶(513),兩組所述側殼(51)的上側內壁均固定設置有三號連接軸(514),兩組所述三號連接軸(514)與兩組連接桿(511)之間均套有二號雙鉤彈簧(515),兩組所述固定板(54)中靠近清潔室(1)的一組一端固定設置有二號電機(516)。
4.根據權利要求1所述的一種全自動化光伏清潔機器人,其特征在于:所述清潔輥(31)高于螺旋輥(35)的位置,所述后殼(32)與螺旋輥(35)相適配,所述開口(34)適配于遮擋殼(33)轉動。
5.根據權利要求1所述的一種全自動化光伏清潔機器人,其特征在于:所述螺旋輥(35)設置為相反的兩段,所述活動板(36)的前后側為傾斜設置,所述一號固定軸(38)與活動板(36)為活動連接。
6.根據權利要求2所述的一種全自動化光伏清潔機器人,其特征在于:所述吸塵泵(42)的吸塵端與吸塵腔(43)的內部相通,所述吸塵泵(42)的出塵端與蓋板(46)固定設置,所述氣泵(47)的出氣端與吹氣腔(45)內部相通,所述氣泵(47)的進氣端固定設置有粉塵濾網,若干組所述導風板(49)分別向兩側傾斜設置。
7.根據權利要求3所述的一種全自動化光伏清潔機器人,其特征在于:兩組所述側殼(51)與內外結構為鏡面對稱設置,所述一號輪(56)與二號輪(58)對齊,所述輔助輪(512)壓持在同步皮帶(513)的上側。
8.根據權利要求3所述的一種全自動化光伏清潔機器人,其特征在于:所述二號雙鉤彈簧(515)為拉伸狀態,所述二號電機(516)轉動軸穿過固定板(54)、側殼(51)內部與二號輪(58)固定設置。
9.一種全自動化光伏清潔機器人的使用方法,用于操作權利要求1-8任意一條所述的一種全自動化光伏清潔機器人,其特征在于,包括以下步驟:
技術總結
本發明屬于光伏板清潔技術領域,具體公開了一種全自動化光伏清潔機器人及其使用方法,包括清潔室,所述清潔室的后側轉動設置有氣動室,所述清潔室的內側設置有清潔組件,所述氣動室的內側設置有處理組件,所述清潔室與氣動室的兩側均設置有變化組件,所述清潔組件包括轉動設置在清潔室內側的清潔輥,所述清潔室的內部靠近前側位置活動設置有后殼,所述后殼的上側固定設置有遮擋殼,所述清潔室的前側對應遮擋殼的位置開設有開口。本發明通過清潔組件、處理組件、變化組件的配合使用,將雪向兩側輸送,避免堆積在螺旋輥的前側產生的阻力對移動的影響,可根據不同清潔情況進行工作,同時有效對兩種光伏板進行清潔工作。
技術研發人員:黃佳佳,吳振作,馬占柱,黃宇,姚凱麗
受保護的技術使用者:秉煜高科技術有限公司
技術研發日:
技術公布日:2024/10/14
- 還沒有人留言評論。精彩留言會獲得點贊!