基于自適應PI控制的太陽能電池板智能向日追蹤器
本發明屬于電氣工程及其自動化領域,具體地說是基于自適應pi控制的太陽能電池板智能向日追蹤器。
背景技術:
1、傳統固定的太陽能電池板的缺點是易受自然因素的影響,且太陽能的利用率較低,提高光電轉化效率是提高太陽光的采集率最直接有效的方法,因此高效率的光電轉化系統的設計對提高太陽能的利用率具有重大應用意義。
2、設計保待光線實時與太陽能電池板保持垂直的系統能夠有效提高太陽能的利用率和光電轉化效率。而太陽光作為散射光,對于地表較小面積的光照強度差異本就不太明顯,光強隨時間變化率很小,若僅依靠光敏電阻檢測不同空間位置的光照強弱,從而輸出信號,很難實現。
3、為此,本領域技術人員提出了基于自適應pi控制的太陽能電池板智能向日追蹤器來解決背景技術提出的問題。
技術實現思路
1、為了解決上述技術問題,本發明提供基于自適應pi控制的太陽能電池板智能向日追蹤器,以解決現有技術中提出的問題。
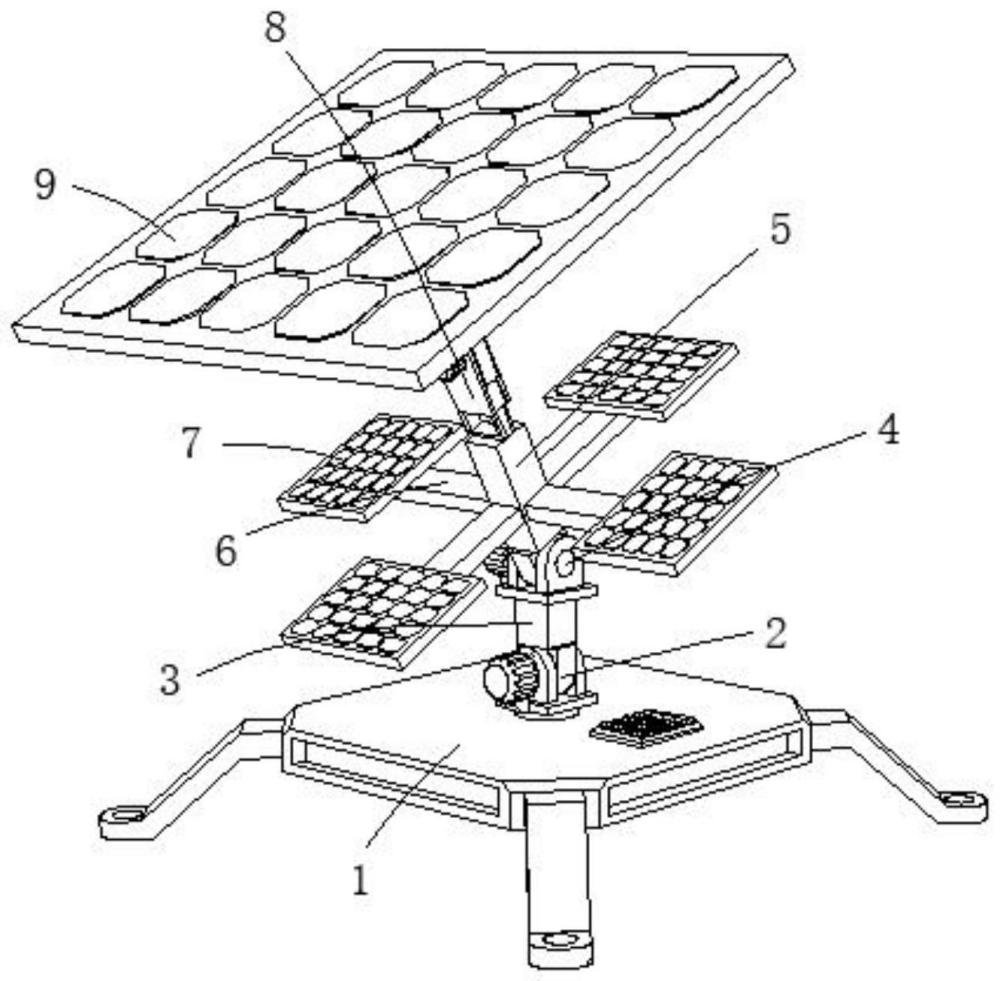
2、基于自適應pi控制的太陽能電池板智能向日追蹤器,包括:
3、底部組件;
4、第一方向調節組件,所述第一方向調節組件位于底部組件的正上方;
5、豎直連接桿,所述豎直連接桿設置在第一方向調節組件的上方;
6、第二方向調節組件,所述第二方向調節組件位于豎直連接桿的頂端,所述第二方向調節組件與第一方向調節組件的內部結構相同,且第二方向調節組件與第一方向調節組件垂直分布;
7、豎直立桿,所述豎直立桿安裝在第二方向調節組件的上方;
8、橫向連接板,四個所述橫向連接板均固定安裝在豎直立桿上,且四個所述橫向連接板呈十字形分布;
9、光伏板,所述光伏板固定安裝在橫向連接板遠離豎直立桿的一端上;
10、間距調節器,所述間距調節器位于豎直立桿的頂端;
11、太陽能板,所述太陽能板位于間距調節器的頂端,所述太陽能板的下表面中部固定安裝有一連接凸塊。
12、優選的,所述底部組件包括一支撐底板,所述支撐底板的中部貫穿轉動有一工字型轉軸,所述工字型轉軸通過第一驅動電機驅動,所述支撐底板的上表面固定安裝有一控制器。
13、優選的,所述支撐底板上固定安裝有四個呈矩形分布的支撐腳,所述支撐腳的底端開設有地釘孔。
14、優選的,所述支撐底板的下表面固定安裝有兩對稱設置的第一電機支座,所述第一驅動電機固定安裝在兩第一電機支座上。
15、優選的,所述第一方向調節組件包括一方形托板,所述方形托板的下表面與工字型轉軸的頂端面固定連接,所述方形托板的上表面固定安裝有兩對稱設置的固定支板,兩所述固定支板之間轉動連接有一轉動軸,所述轉動軸通過第二驅動電機驅動。
16、優選的,所述第二驅動電機的輸出端與轉動軸的一端固定連接,所述方形托板的一側面上固定安裝有一第二電機支座,所述第二驅動電機固定安裝在第二電機支座上,所述豎直連接桿的底端面與轉動軸的頂部固定連接。
17、優選的,所述間距調節器包括一承載筒,所述承載筒的內部轉動連接有一連接齒輪,所述連接齒輪通過驅動馬達驅動,所述驅動馬達固定安裝在承載筒的前側中部,所述驅動馬達的輸出端與連接齒輪的一側面固定連接,所述承載筒的一側頂部滑動連接有一第一連接齒板,所述承載筒的一側底部滑動連接有一第二連接齒板,所述第一連接齒板和第二連接齒板均勻連接齒輪嚙合連接,所述第一連接齒板的頂端與連接凸塊的底部固定連接,所述第二連接齒板的底端與豎直立桿的頂端固定連接。
18、與現有技術相比,本發明具有如下有益效果:
19、1、本發明利用陰影感應機制,對極微弱的光照差別進行精確識別,通過電機驅動,智能調整系統各組件的位置,確保在太陽光照射下,中心太陽能板的陰影能夠完全覆蓋感光陣列,這種追光機制間相較于傳統的光敏電阻檢測方式,其光照檢測的精度更高,有效提升了陽光接收效率;本發明通過在豎直立桿頂端安裝間距調節器,實現了太陽能板陰影對四個陣列光伏板的精準遮擋,顯著提高了系統的檢測靈敏度,使系統更加方便靈活;本發明也可有效用于光伏發電效率和發電容量研究。
20、2、本發明可以大幅提升光電轉換效率,使太陽能的利用更加充分和高效。這一研究成果對于人類解決能源問題、提升可再生能源利用效率具有重要的參考價值。
技術特征:
1.基于自適應pi控制的太陽能電池板智能向日追蹤器,其特征在于,包括:
2.如權利要求1所述基于自適應pi控制的太陽能電池板智能向日追蹤器,其特征在于:所述底部組件(1)包括一支撐底板(101),所述支撐底板(101)的中部貫穿轉動有一工字型轉軸(103),所述工字型轉軸(103)通過第一驅動電機(104)驅動,所述支撐底板(101)的上表面固定安裝有一控制器(106)。
3.如權利要求2所述基于自適應pi控制的太陽能電池板智能向日追蹤器,其特征在于:所述支撐底板(101)上固定安裝有四個呈矩形分布的支撐腳(102),所述支撐腳(102)的底端開設有地釘孔。
4.如權利要求2所述基于自適應pi控制的太陽能電池板智能向日追蹤器,其特征在于:所述支撐底板(101)的下表面固定安裝有兩對稱設置的第一電機支座(105),所述第一驅動電機(104)固定安裝在兩第一電機支座(105)上。
5.如權利要求2所述基于自適應pi控制的太陽能電池板智能向日追蹤器,其特征在于:所述第一方向調節組件(2)包括一方形托板(201),所述方形托板(201)的下表面與工字型轉軸(103)的頂端面固定連接,所述方形托板(201)的上表面固定安裝有兩對稱設置的固定支板(202),兩所述固定支板(202)之間轉動連接有一轉動軸(203),所述轉動軸(203)通過第二驅動電機(204)驅動。
6.如權利要求5所述基于自適應pi控制的太陽能電池板智能向日追蹤器,其特征在于:所述第二驅動電機(204)的輸出端與轉動軸(203)的一端固定連接,所述方形托板(201)的一側面上固定安裝有一第二電機支座(205),所述第二驅動電機(204)固定安裝在第二電機支座(205)上,所述豎直連接桿(3)的底端面與轉動軸(203)的頂部固定連接。
7.如權利要求6所述基于自適應pi控制的太陽能電池板智能向日追蹤器,其特征在于:所述間距調節器(8)包括一承載筒(801),所述承載筒(801)的內部轉動連接有一連接齒輪(802),所述連接齒輪(802)通過驅動馬達(803)驅動,所述驅動馬達(803)固定安裝在承載筒(801)的前側中部,所述驅動馬達(803)的輸出端與連接齒輪(802)的一側面固定連接,所述承載筒(801)的一側頂部滑動連接有一第一連接齒板(804),所述承載筒(801)的一側底部滑動連接有一第二連接齒板(805),所述第一連接齒板(804)和第二連接齒板(805)均勻連接齒輪(802)嚙合連接,所述第一連接齒板(804)的頂端與連接凸塊(901)的底部固定連接,所述第二連接齒板(805)的底端與豎直立桿(5)的頂端固定連接。
技術總結
本發明屬于電氣工程及其自動化領域,提供了基于自適應PI控制的太陽能電池板智能向日追蹤器,包括:底部組件;第一方向調節組件,第一方向調節組件位于底部組件的正上方;豎直連接桿,豎直連接桿設置在第一方向調節組件的上方;當太陽光照射在太陽能板上時,太陽能板完全遮擋住四個陣列的光伏板時,每塊光伏板傳感器上均無信號輸出,當太陽與太陽能板出現夾角,下方傳感器陣列出現光照,經過放大比較后產生差模信號,經由數模轉換等過程,輸入給第一方向調節組件和第二方向調節組件上的電機開始運動,從而對太陽能板的位置進行調節,直到傳感器陣列上無差模信號輸出,即三者一線,完成太陽跟蹤過程。
技術研發人員:王智鑫,尚新磊,李美凝,朱亞丁,張洋
受保護的技術使用者:吉林大學
技術研發日:
技術公布日:2024/9/9
- 還沒有人留言評論。精彩留言會獲得點贊!