一種尋找晶圓凹槽切口中心點的方法及系統與流程
本發明涉及半導體器件制造,尤其涉及一種尋找晶圓凹槽切口中心點的方法及系統。
背景技術:
1、本部分的陳述僅僅是提供了與本發明相關的背景技術信息,不必然構成在先技術。
2、晶圓定位技術是半導體制造領域中的關鍵技術之一,它確保離子束可以精確地注入晶圓的特定區域。在離子束注入過程中,機械手需頻繁地在不同載盤上取放晶圓,這就要求有效解決可能出現的晶圓定位不精確、偏心以及缺口方向不一致等問題。
3、晶圓定位的精準性對于離子注入工藝至關重要,因為它直接關系到注入過程的均勻性和精確度,進而決定了最終產品的性能和制造良率。在離子注入過程中,任何定位上的偏差都可能導致注入的不均勻性。
4、現有技術中,對于晶圓的定位,往往采用以下方式:
5、(1)利用激光作為參考光源,結合光學識別系統來精確定位晶圓上的特征。但是,高精度激光發射器和相關的精密運動控制系統通常價格昂貴,增加成本。而且激光發射器的移動速度較慢,這可能會影響整體的加工速度。
6、(2)采取晶圓周向觸抵的方式迫使其中心移動至與臺面中心重合。這種方法通常涉及到使用機械裝置接觸晶圓的邊緣,并通過施加輕微的壓力來調整晶圓的位置,使其中心與定位臺面的中心對齊。如果施加的壓力過大,可能會導致晶圓彎曲或破裂;因此,需要逐點接觸晶圓邊緣,這可能會延長定位所需的時間,同時晶圓邊緣的不規則性也可能會影響定位的準確性。
技術實現思路
1、為了解決上述問題,本發明提出了一種尋找晶圓凹槽(notch)切口中心點的方法及系統,能夠確保晶圓定位的準確性,并且顯著提高了生產過程中的定位質量和效率。
2、在一些實施方式中,采用如下技術方案:
3、一種尋找晶圓凹槽切口中心點的方法,包括:
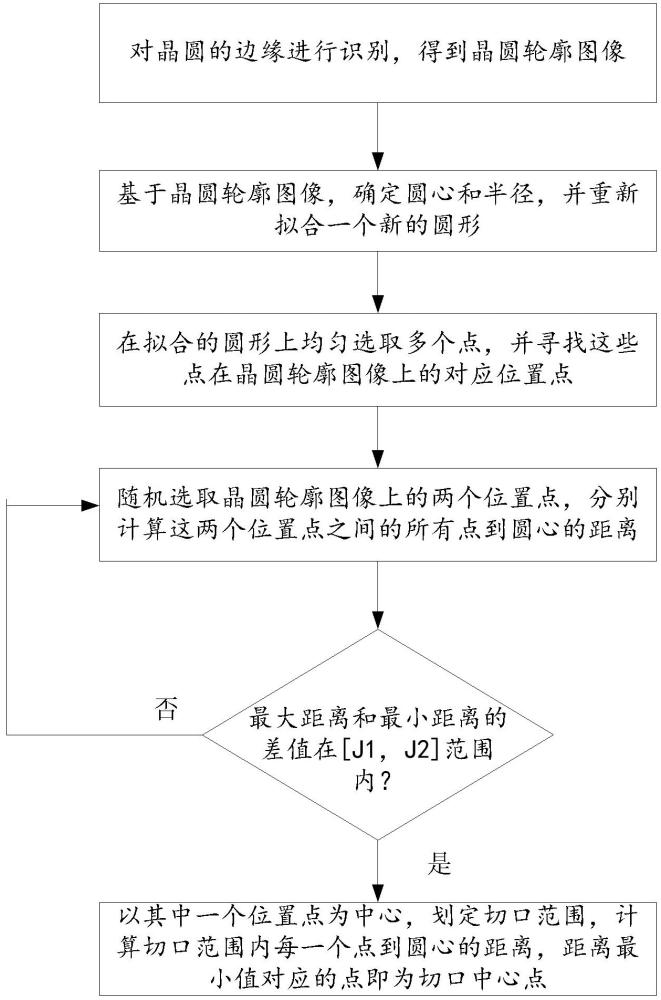
4、對晶圓的邊緣進行識別,得到晶圓輪廓圖像;
5、基于晶圓輪廓圖像,確定圓心和半徑,并重新擬合一個新的圓形;
6、在擬合的圓形上均勻選取多個點,并尋找這些點在晶圓輪廓圖像上的對應位置點;
7、隨機選取晶圓輪廓圖像上的兩個位置點,分別計算這兩個位置點之間的所有點到圓心的距離,基于最大距離和最小距離的差值判斷這兩個位置點之間是否存在切口;
8、若存在切口,以所述的兩個位置點中其中一個位置點為中心,劃定切口范圍,計算所述切口范圍內每一個點到圓心的距離,距離最小值對應的點即為切口中心點。
9、若不存在切口,重新在晶圓輪廓圖像上的其他位置選取兩個位置點,重新判斷這兩個位置點之間是否存在切口。
10、作為進一步的方案,在擬合的圓形上均勻選取多個點,具體為:
11、在擬合的圓形上每隔設定距離g取一個點,所述距離g不大于晶圓凹槽的寬度,所述寬度指的是晶圓輪廓上缺失的圓弧部分長度。
12、作為進一步的方案,所述的尋找這些點在晶圓輪廓圖像上的對應位置點,具體為:
13、將擬合的圓形劃分為兩兩相對的四個區域,其中區域a和區域c上下相對,區域b和區域d左右相對;
14、假定擬合的圓形上的點為pi,晶圓輪廓圖像上對應的位置點為fi,i=1,2,…,n,n表示點的數量;
15、如果pi位于區域a或區域c內,以pi為起點,沿著y方向尋找像素點,當找到像素點的灰度值大于設定閾值h時,該像素點即為pi對應的晶圓輪廓圖像上的位置點;
16、如果pi位于區域b或區域d內,以pi為起點,沿著x方向尋找像素點,當找到像素點的灰度值大于設定閾值h時,該像素點即為pi對應的晶圓輪廓圖像上的位置點。
17、作為進一步的方案,基于最大距離和最小距離的差值判斷這兩個位置點之間是否存在切口,具體為:
18、計算最大距離和最小距離的差值,如果所述差值在設定的閾值范圍(j1,j2)內,則判斷兩個位置點之間存在切口;
19、否則,重新在其他位置選擇兩個位置點,分別計算這兩個位置點之間的所有點到圓心的距離,基于最大距離和最小距離的差值判斷這兩個位置點之間是否存在切口。
20、作為進一步的方案,若存在切口,以所述的兩個位置點中其中一個位置點為中心點,劃定切口范圍,具體為:
21、如果所述的其中一個位置點位于區域a或區域c內,則以該位置點為中心,沿x方向向兩邊分別延伸e/2距離,通過構造矩形確定延伸后的線段所對應的晶圓輪廓圖像中的弧段,所述弧段即為切口范圍;e不小于晶圓凹槽的寬度;
22、如果所述的其中一個位置點位于區域b或區域d內,則以該位置點為中心,沿y方向向兩邊分別延伸e/2距離,通過構造矩形確定延伸后的線段所對應的晶圓輪廓圖像中的弧段,所述弧段即為切口范圍。
23、作為進一步的方案,所述切口中心點為切口弧段的中點。
24、在另一些實施方式中,采用如下技術方案:
25、一種尋找晶圓凹槽切口中心點的系統,包括:
26、圖像識別模塊,用于對晶圓的邊緣進行識別,得到晶圓輪廓圖像;
27、圓形擬合模塊,用于基于晶圓輪廓圖像,確定圓心和半徑,并重新擬合一個新的圓形;
28、切口判斷模塊,用于在擬合的圓形上均勻選取多個點,并尋找這些點在晶圓輪廓圖像上的對應位置點;隨機選取晶圓輪廓圖像上的兩個位置點,分別計算這兩個位置點之間的所有點到圓心的距離,基于最大距離和最小距離的差值判斷這兩個位置點之間是否存在切口;
29、切口中心點確定模塊,用于在存在切口時,以所述的兩個位置點中其中一個位置點為中心,劃定切口范圍,計算所述切口范圍內每一個點到圓心的距離,距離最小值對應的點即為切口中心點。
30、在另一些實施方式中,采用如下技術方案:
31、一種終端設備,其包括處理器和存儲器,處理器用于實現指令;存儲器用于存儲多條指令,所述指令適于由處理器加載并執行上述方法的步驟。
32、在另一些實施方式中,采用如下技術方案:
33、一種計算機可讀存儲介質,其上存儲有計算機程序/指令,該計算機程序/指令被處理器執行時實現上述方法的步驟。
34、與現有技術相比,本發明的有益效果是:
35、(1)本發明方法通過準確尋找切口中心點,能夠實現對晶圓的高精準度定位;切口中心點的確定過程簡單,無需復雜的操作和計算,能夠顯著提高生產過程中的定位質量和定位效率,從而提升離子注入的準確度和制備效率。
36、(2)本發明通過擬合新的標準圓形,與晶圓輪廓圖像進行位置點的匹配,利用晶圓輪廓圖像上位置點到圓心的距離,篩選出切口范圍,然后基于切口范圍內各點到圓心的距離最小值,確定切口中心點位置;整個過程無需復雜的對準過程,計算過程簡單且易于實現,得到的切口中心點的位置準確可靠。
37、本發明的其他特征和附加方面的優點將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本方面的實踐了解到。
技術特征:
1.一種尋找晶圓凹槽切口中心點的方法,其特征在于,包括:
2.如權利要求1所述的一種尋找晶圓凹槽切口中心點的方法,其特征在于,若不存在切口,重新在晶圓輪廓圖像上的其他位置選取兩個位置點,重新判斷這兩個位置點之間是否存在切口。
3.如權利要求1所述的一種尋找晶圓凹槽切口中心點的方法,其特征在于,在擬合的圓形上均勻選取多個點,具體為:
4.如權利要求1所述的一種尋找晶圓凹槽切口中心點的方法,其特征在于,所述的尋找這些點在晶圓輪廓圖像上的對應位置點,具體為:
5.如權利要求1所述的一種尋找晶圓凹槽切口中心點的方法,其特征在于,基于最大距離和最小距離的差值判斷這兩個位置點之間是否存在切口,具體為:
6.如權利要求1所述的一種尋找晶圓凹槽切口中心點的方法,其特征在于,若存在切口,以所述的兩個位置點中其中一個位置點為中心點,劃定切口范圍,具體為:
7.如權利要求1所述的一種尋找晶圓凹槽切口中心點的方法,其特征在于,所述切口中心點為切口弧段的中點。
8.一種尋找晶圓凹槽切口中心點的系統,其特征在于,包括:
9.一種終端設備,其包括處理器和存儲器,處理器用于實現指令;存儲器用于存儲多條指令,其特征在于,所述指令適于由處理器加載并執行權利要求1-7任一項所述方法的步驟。
10.一種計算機可讀存儲介質,其上存儲有計算機程序/指令,其特征在于,該計算機程序/指令被處理器執行時實現權利要求1-7任一項所述方法的步驟。
技術總結
本發明涉及半導體器件制造技術領域,具體公開了一種尋找晶圓凹槽切口中心點的方法及系統,方法包括:基于晶圓輪廓圖像,確定圓心和半徑,并重新擬合一個新的圓形;在擬合的圓形上均勻選取多個點,并尋找這些點在晶圓輪廓圖像上的對應位置點;隨機選取晶圓輪廓圖像上的兩個位置點,分別計算這兩個位置點之間的所有點到圓心的距離,基于最大距離和最小距離的差值判斷這兩個位置點之間是否存在切口;若存在切口,以兩個位置點中其中一個位置點為中心,劃定切口范圍,計算切口范圍內每一個點到圓心的距離,距離最小值對應的點即為切口中心點。本發明能夠顯著提高生產過程中的定位質量和定位效率,從而提升離子注入的準確度和制備效率。
技術研發人員:李更蘭,楊曉琳
受保護的技術使用者:艾恩(山東)半導體科技有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!