智能刀具柜及其工作方法與流程
本發明涉及機床領域,具體涉及一種智能刀具柜及其工作方法。
背景技術:
1、刀具柜是用于存放和組織各種刀具的設備,它們在工業生產、機械加工以及個人工具管理中都非常有用。
2、相關技術中的刀具柜僅有存儲功能,無法對刀具進行檢測。每次刀具進行存放時采用人工進行存放,并通過人工對刀具進行檢測,檢測完成之后,依據人工檢測的結果放置到貨架的對應區域。一方面,會導致流轉效率降低,無法滿足自動化車間的使用需求,另一方面人工轉運以及人工檢測會導致人工成本過高,檢測結果也不夠精準。
3、上述問題是目前亟待解決的。
技術實現思路
1、本發明的目的是提供一種智能刀具柜及其工作方法。
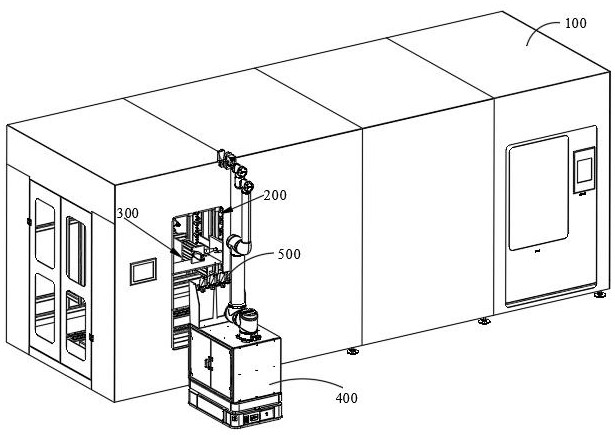
2、為了解決上述技術問題,本發明提供了一種智能刀具柜,包括:
3、柜體、貨架、控制模塊、檢測機構、自動取放刀模塊以及agv轉運車;
4、所述貨架設置在所述柜體內;
5、所述檢測機構固定設置在所述柜體的外側壁上;
6、所述控制模塊與所述agv轉運車以及自動取放刀模塊通訊連接,且適于控制所述agv轉運車將刀具運輸到檢測機構上進行檢測;
7、所述檢測機構與所述控制模塊電連接,且適于將檢測結果發送給控制模塊;
8、所述自動取放刀模塊設置在柜體內,且位于貨架的一側,所述自動取放刀模塊適于依據檢測結果將檢測完畢的刀具放置在所述貨架上的對應區域。
9、進一步的,所述檢測機構包括:檢測平臺、定位機構以及視覺檢測組件;
10、所述檢測平臺固定設置在所述柜體的外側壁上;
11、所述定位機構固定設置在所述檢測平臺的頂面,且適于對刀具進行定位;
12、所述視覺檢測組件設置在所述檢測平臺上方,且所述視覺檢測組件的拍攝區域與所述定位機構上的刀具所在位置適配。
13、進一步的,所述agv轉運車適于在將刀具運輸到檢測機構上進行檢測時,控制刀具在定位機構上進行轉動;
14、所述視覺檢測組件適于對轉動的刀具進行錄像信息,并將刀架位置信息發送給所述控制模塊,來實現刀具的定位放置;
15、所述控制模塊適于依據錄像信息對刀具進行檢測。
16、進一步的,所述控制模塊適于依據錄像信息對刀具進行檢測的步驟,即:
17、對錄像信息進行視頻處理,獲取待檢測圖像信息;
18、將合格的刀具的合格圖像信息與待檢測圖像信息進行像素點比對,在擬合度超過預設值時,表明刀具合格,反之表明刀具不合格。
19、進一步的,所述定位機構包括:
20、定位板、彈性定位件、轉動定位件以及固定定位件;
21、所述彈性定位件、轉動定位件以及固定定位件均設置在所述定位板上;
22、所述定位板開設有與刀具直徑適配的插入槽;
23、所述固定定位件設置在所述插入槽的下底壁;
24、所述轉動定位件安裝在所述插入槽的上方;
25、所述彈性定位件的伸縮方向朝向所述插入槽的圓心設置;
26、所述彈性定位件、轉動定位件以及固定定位件適于在刀具轉動時,與刀具軸體上的定位槽完成卡接,完成對刀具定位槽的檢測;
27、所述控制模塊適于依據錄像信息對刀具進行檢測的步驟還包括:
28、所述agv轉運車還適于判斷預設時間內刀具是否與定位槽完成卡接,并將檢測結果發送至所述控制模塊。
29、進一步的,所述判斷預設時間內刀具是否與定位槽完成卡接的步驟,即,若刀具的定位槽合格,在刀具在轉動預設時間之內,所述彈性定位件、轉動定位件以及固定定位件會與定位槽完成卡接,對刀具進行限制,此時刀具不能繼續轉動,表明刀具的定位槽合格;若刀具在轉動預設時間之內,刀具還在繼續轉動,表明所述彈性定位件、轉動定位件以及固定定位件未與定位槽完成卡接,此時刀具的定位槽不合格。
30、進一步的,所述彈性定位件包括:
31、容納槽、復位彈簧、彈性柱以及第一定位滾輪;
32、所述容納槽開設在所述定位板上;
33、所述彈性柱通過復位彈簧彈性連接在所述容納槽中;
34、所述第一定位滾輪轉動連接在所述彈性柱遠離所述復位彈簧的一端。
35、進一步的,所述轉動定位件包括:
36、轉動板以及第二定位滾輪;
37、所述轉動板一端與所述定位板轉動連接,另一端伸入所述插入槽中;
38、所述第二定位滾輪轉動連接在所述轉動板伸入所述插入槽的一端。
39、進一步的,所述檢測機構還包括噴氣組件;
40、所述噴氣組件的噴氣口固定設置在所述柜體的外側壁上,且與所述定位機構上的刀具相對;
41、所述控制模塊還適于依據錄像信息對刀具清潔后的清潔效果進行檢測;
42、所述自動取放刀模塊包括滑軌、滑動設置在所述滑軌上支撐柱、固定安裝在支撐柱上的升降電機、滑動安裝在支撐柱上的升降板、轉動設置在升降板一側的轉動座、固定安裝在轉動座上的取放氣缸和固定安裝在取放氣缸活動端的夾爪;
43、所述升降電機與升降板傳動連接;
44、所述升降板上安裝有電機,電機的活動端與轉動座連接;
45、所述取放氣缸適于驅動夾爪伸縮,所述夾爪適于將刀具放置到貨架上或將貨架上的刀具夾取。
46、本發明還提供了一種如上述的智能刀具柜的工作方法,所述方法包括:
47、將更換后的刀具放置在agv轉運車中;
48、控制agv轉運車將刀具放置到檢測機構上進行檢測;
49、檢測機構發送檢測結果至控制模塊;
50、控制模塊依據檢測結果將檢測完畢的刀具放置在所述貨架上的對應區域。
51、本發明的有益效果是,本發明提供了一種智能刀具柜及其工作方法,其中,智能刀具柜包括:柜體、貨架、控制模塊、檢測機構、自動取放刀模塊700以及agv轉運車;所述貨架設置在所述柜體內;所述檢測機構固定設置在所述柜體的外側壁上;所述控制模塊與所述agv轉運車通訊連接,且適于控制所述agv轉運車將刀具運輸到檢測機構上進行檢測;所述檢測機構與所述控制模塊電連接,且適于將檢測結果發送給控制模塊;所述自動取放刀模塊設置在柜體內,且位于貨架的一側,所述自動取放刀模塊適于依據檢測結果將檢測完畢的刀具放置在所述貨架上的對應區域。通過設置agv轉運車對刀具進行自動化轉運,減少人工成本,實現刀具堆放的自動化,同時,在刀具柜上設置檢測機構,agv轉運車先將刀具放置到檢測機構上進行檢測,依據檢測結果將刀具放置在貨架的對應區域,完成刀具的自動化檢測以及存儲,便于刀具后續的使用。
技術特征:
1.一種智能刀具柜,其特征在于,包括:
2.如權利要求1所述的智能刀具柜,其特征在于,
3.如權利要求2所述的智能刀具柜,其特征在于,
4.如權利要求3所述的智能刀具柜,其特征在于,
5.如權利要求3所述的智能刀具柜,其特征在于,
6.如權利要求5所述的智能刀具柜,其特征在于,
7.如權利要求5所述的智能刀具柜,其特征在于,
8.如權利要求5所述的智能刀具柜,其特征在于,
9.如權利要求3所述的智能刀具柜,其特征在于,
10.如權利要求1所述的智能刀具柜,其特征在于,
11.一種如權利要求1所述的智能刀具柜的工作方法,其特征在于,所述方法包括:
技術總結
本發明屬于機床領域,具體提供了一種智能刀具柜及其工作方法,其中,智能刀具柜包括:柜體、貨架、控制模塊、檢測機構、自動取放刀模塊以及AGV轉運車;所述檢測機構與所述控制模塊電連接,且適于將檢測結果發送給控制模塊;所述自動取放刀模塊適于依據檢測結果將檢測完畢的刀具放置在所述貨架上的對應區域。通過設置AGV轉運車對刀具進行自動化轉運,減少人工成本,實現刀具堆放的自動化,同時,在刀具柜上設置檢測機構,AGV轉運車先將刀具放置到檢測機構上進行檢測,依據檢測結果將刀具放置在貨架的對應區域,完成刀具的自動化檢測以及自動化存儲,便于刀具后續的管理以及使用。
技術研發人員:張振,顧勇,趙奇,華耀
受保護的技術使用者:中國機械總院集團江蘇分院有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!