基于相對位置學習的機場保障節點自動識別方法與流程
本發明涉及機坪保障,特別涉及基于相對位置學習的機場保障節點自動識別方法。
背景技術:
1、機場保障節點系統是現代機場運營中至關重要的一部分,它涵蓋了一系列技術和設施,旨在確保機場各項運營活動的高效性、安全性和可靠性。在傳統機場運行管理中,保障節點信息的采集通常依賴于人工觀察和手動填報,這種方式存在一些問題。僅憑借人工觀察和手動填報,會面臨以下問題:增加了人員的工作負擔,可能會影響工作質量;數據的實時性較差,可能導致信息不及時;手動填報容易出現漏報、誤報等問題,使得數據的準確性和參考性受到影響。而機場保障節點系統就可以解決上述問題,通過多個子系統和設備的集成進行實時的檢測和反饋協同,保障機場的秩序。
2、目前,圖像處理技術在航班保障中起著十分重要的作用。通過智能感知技術,利用傳感器網絡和監控攝像頭等設備,實時監測機場各個區域的情況。將收集到圖像數據通過圖像識別技術能夠檢測到飛機、車輛、行李和人員的位置和運動,以及檢測環境因素如天氣、溫度和能見度等信息。建立可靠的通信和網絡基礎設施,保障各個設備之間的信息交換和互聯。這包括局域網、無線網絡、衛星通信等技術,確保系統在復雜的環境中穩定運行。與航空管制部門和航空公司的系統進行集成,確保航班安全和正常運行。
3、現有基于圖像識別的保障節點自動錄入需要基于視頻識別出保障車輛的類型,并且能夠在整個視頻過程中對車輛進行跟蹤,但這種技術在保障車輛被遮擋或雨霧光照情況下可能出現嚴重誤差,導致整個系統的識別效果大大降低。
技術實現思路
1、針對現有技術中的上述不足,本發明提供的相對位置學習的機場保障節點自動識別方法并不直接識別保障車輛,而是先識別出飛機的位姿,基于飛機位姿預測出保障車輛與飛機的相對位置,只要有車輛進入到識別區域,則可以認為是對應保障車輛的出現,由于本方法只需要基于圖像識別技術識別出飛機上幾個關鍵的部位,如機頭和機尾,這兩個關鍵部位的可辨識度很高,在雨霧或者夜間也能夠很好地被識別出來,而且幾乎不存在被遮擋的問題,其解決了現有的基于圖像識別的保障節點自動錄入方法在圖像識別效果不佳的情況下無法進行保障節點檢測的問題。
2、為了達到上述發明目的,本發明采用的技術方案為:基于相對位置學習的機場保障節點自動識別方法,包括:
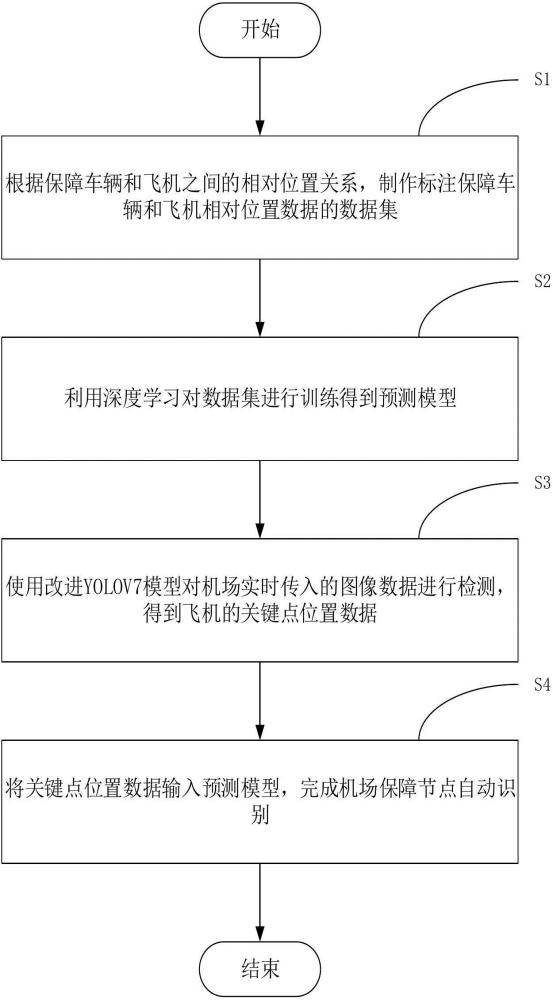
3、s1、根據保障車輛和飛機之間的相對位置關系,制作標注保障車輛和飛機相對位置數據的數據集;
4、s2、利用深度學習對數據集進行訓練得到預測模型;
5、s3、使用改進yolov7模型對機場實時傳入的圖像數據進行檢測,得到飛機的關鍵點位置數據;
6、s4、將關鍵點位置數據輸入預測模型,完成機場保障節點自動識別。
7、進一步地:所述s1包括:
8、s11、對飛機的3d圖像進行不同拍攝角度以及拍攝距離的隨機變換,并進行數據關鍵點標注,得到飛機位姿圖像數據;
9、s12、根據飛機位姿圖像數據和對應的保障車輛位置,獲取相對位置特征,并將相對位置特征作為標注保障車輛和飛機相對位置數據的數據集。
10、進一步地:所述s12中,相對位置特征包括機頭x坐標、機頭y坐標、機尾x坐標、機尾y坐標、飛機朝向、保障車輛檢測框左上角坐標和保障車輛檢測框右下角坐標。
11、進一步地:所述s2中,預測模型包括依次連接的輸入層、第一隱藏層、第二隱藏層和輸出層;
12、所述第一隱藏層包括64個神經元,所述第二隱藏層包括32個神經元。
13、進一步地:所述s3中,改進yolov7模型對機場實時傳入的圖像數據的處理方法包括:
14、s31、將機場實時傳入的圖像數據輸入改進yolov7模型,通過改進yolov7模型的主干網絡和頸部網絡,提取三種不同尺寸的特征圖;
15、s32、使用解耦頭分別對三種不同尺寸的特征圖進行預測,得到用于分類的cls特征、用于定位的reg特征和用于置信度任務的obj特征;
16、s33、將用于分類的cls特征、用于定位的reg特征和用于置信度任務的obj特征經過堆疊操作組合為最終特征圖,并將最終特征圖作為飛機的關鍵點位置數據。
17、進一步地:所述s32中,解耦頭包括分類分支和回歸分支;
18、所述分類分支包括依次連接的兩層3×3?卷積層和一層1×1卷積層;
19、所述分類分支輸出用于分類的cls特征;
20、所述回歸分支包括依次連接兩層3×3?卷積層和平行的一層1×1卷積層;
21、所述回歸分支輸出用于定位的reg特征和用于置信度任務的obj特征。
22、進一步地:所述s4包括:
23、s41、將關鍵點位置數據輸入預測模型,通過預測模型輸出保障車輛的檢測框;
24、s42、跟蹤保障車輛的檢測框中保障車輛段運動軌跡,根據保障車輛段運動軌跡,得到機場保障的開始時間節點和結束時間節點,完成機場保障節點自動識別。
25、本發明的有益效果為:
26、本發明提供的相對位置學習的機場保障節點自動識別方法并不直接識別保障車輛,而是先識別出飛機的位姿,基于飛機位姿預測出保障車輛與飛機的相對位置,只要有車輛進入到識別區域,則可以認為是對應保障車輛的出現;
27、由于本方法只需要基于圖像識別技術識別出飛機上幾個關鍵的部位,如機頭個機尾,這兩個關鍵部位的可辨識度很高,在雨霧或者夜間也能夠很好地被識別出來,而且幾乎不存在被遮擋的問題,其解決了現有的基于圖像識別的保障節點自動錄入方法在圖像識別效果不佳的情況下無法進行保障節點檢測的問題。
技術特征:
1.基于相對位置學習的機場保障節點自動識別方法,其特征在于,包括:
2.根據權利要求1所述的基于相對位置學習的機場保障節點自動識別方法,其特征在于,所述s1包括:
3.根據權利要求1所述的基于相對位置學習的機場保障節點自動識別方法,其特征在于,所述s12中,相對位置特征包括機頭x坐標、機頭y坐標、機尾x坐標、機尾y坐標、飛機朝向、保障車輛檢測框左上角坐標和保障車輛檢測框右下角坐標。
4.根據權利要求1所述的基于相對位置學習的機場保障節點自動識別方法,其特征在于,所述s2中,預測模型包括依次連接的輸入層、第一隱藏層、第二隱藏層和輸出層;
5.根據權利要求1所述的基于相對位置學習的機場保障節點自動識別方法,其特征在于,所述s3中,改進yolov7模型對機場實時傳入的圖像數據的處理方法包括:
6.根據權利要求5所述的基于相對位置學習的機場保障節點自動識別方法,其特征在于,所述s32中,解耦頭包括分類分支和回歸分支;
7.根據權利要求1所述的基于相對位置學習的機場保障節點自動識別方法,其特征在于,所述s4包括:
技術總結
本發明公開了基于相對位置學習的機場保障節點自動識別方法,涉及機坪保障技術領域,包括:S1、根據保障車輛和飛機之間的相對位置關系,制作標注保障車輛和飛機相對位置數據的數據集;S2、利用深度學習對數據集進行訓練得到預測模型;S3、使用改進YOLOV7模型對機場實時傳入的圖像數據進行檢測,得到飛機的關鍵點位置數據;S4、將關鍵點位置數據輸入預測模型,完成機場保障節點自動識別,本發明彌補了完全依靠圖像檢測進行保障節點識別方法的不足,提高保障節點檢測效率。
技術研發人員:黨婉麗,羅謙,鄭懷宇,耿龍,曹利波,王朝,牛杰,王江,裴翔宇,但軍,劉晨,張啟俊
受保護的技術使用者:民航成都電子技術有限責任公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!