一種弧形板胎具的曲率弧度自適應調整方法、介質及系統與流程
本發明屬于建筑施工,具體而言,涉及一種弧形板胎具的曲率弧度自適應調整方法、介質及系統。
背景技術:
1、現有技術的弧形板胎具系統在裝配工況較為復雜的條件下,仍缺乏對弧形板放置與支撐過程的精確控制與感知,無法對弧形板的支撐狀態進行自主監控,這在一定程度上影響了系統對非結構化工件的裝配質量與效率。在實際裝配過程,通過控制液壓缸的伸縮運動調整變形構件與胎具間的接觸狀態,從而適應非結構化弧形構件的高精度裝配。
2、在復雜裝配場景下,現有技術存在如下問題:缺乏對弧形板形狀和支撐狀態的實時感知和分析,無法對液壓桿參數進行主動調整;其次,對胎具與弧形板間作用力缺乏全局模型描述,使弧形板穩定性難以保證。這將增加試裝次數,降低系統的裝配質量與效率。因此亟需一種新型的弧形構件主動適應裝配技術應用于該系統。
技術實現思路
1、有鑒于此,本發明提供一種弧形板胎具的曲率弧度自適應調整方法、介質及系統,解決了放置弧形板時,難以將弧形板的重心與弧形板胎具的多個液壓桿支撐部形成的幾何中心一致,也難以將弧形板的底部均勻受力,導致部分支撐桿支撐力不均衡,影響胎具的液壓桿壽命同樣也存在弧形板放置不穩定的問題。
2、本發明是這樣實現的:
3、本發明的第一方面提供一種弧形板胎具的曲率弧度自適應調整方法,用于調整弧形板胎具的曲率弧度,所述弧形板胎具包括弧形板底部的液壓提升系統,所述液壓提升系統由懸浮式液壓桿組成,所述懸浮式液壓桿下部設有裝置框架,所述裝置框架中間部位設有鎖緊裝置,所述裝置框架內部可布置信號傳輸線纜,所述懸浮式液壓桿上部設有滑輪;
4、其中,所述方法包括以下步驟:
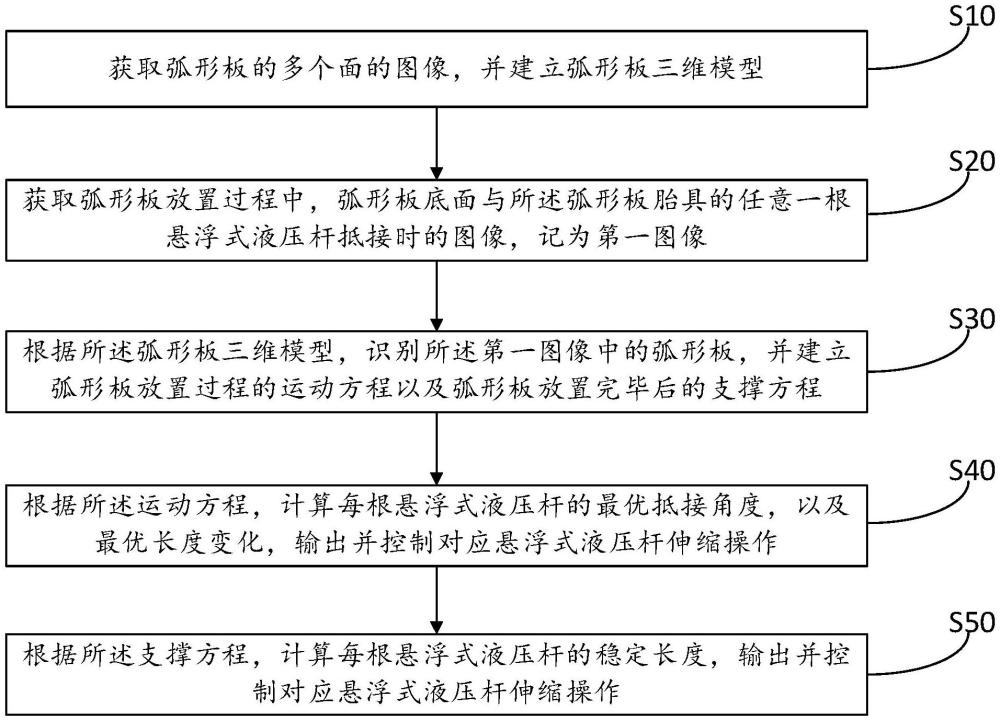
5、s10、獲取弧形板的多個面的圖像,并建立弧形板三維模型;
6、s20、獲取弧形板放置過程中,弧形板底面與所述弧形板胎具的任意一根懸浮式液壓桿抵接時的圖像,記為第一圖像;
7、s30、根據所述弧形板三維模型,識別所述第一圖像中的弧形板,并建立弧形板放置過程的運動方程以及弧形板放置完畢后的支撐方程;
8、s40、根據所述運動方程,計算每根懸浮式液壓桿的最優抵接角度,以及最優長度變化,輸出并控制對應懸浮式液壓桿伸縮操作;
9、s50、根據所述支撐方程,計算每根懸浮式液壓桿的穩定長度,輸出并控制對應懸浮式液壓桿伸縮操作。
10、通過一種弧形板胎具的曲率弧度自適應調整方法可準確獲知弧形板的三維特征信息,智能建立放置過程和支撐過程的數學模型,并以此進行液壓桿參數的最優化計算與控制,從而使弧形板能夠精確適應目標胎具的弧度,實現弧形板在胎具上曲率弧度的自適應調整。
11、在上述技術方案的基礎上,本發明的一種弧形板胎具的曲率弧度自適應調整方法還可以做如下改進:
12、其中,所述s10的步驟,采用圖像處理與三維重建相結合的方法:
13、使用圖像采集設備獲取弧形板不同角度的圖像,其中,所述圖像采集設備包括攝像頭;
14、通過圖像分割、幾何變換、三維匹配的算法處理圖像,獲得弧形板的三維點云;
15、并使用三維濾波、曲面重建算法,將所述三維點云轉化為弧形板三維模型。
16、進一步的,所述s20的步驟是:使用高速攝像頭在弧形板底面與任一懸浮式液壓桿初次接觸時獲取圖像,作為第一圖像。
17、進一步的,所述建立弧形板放置過程的運動方程和支撐方程的步驟,采用計算機視覺識別與剛體運動學模型相結合的方法:
18、通過計算機視覺識別技術,在所述第一圖像中識別所述弧形板的空間位姿;
19、基于所述空間位姿及所述懸浮式液壓桿的動作特征,建立所述弧形板與懸浮式液壓桿間的運動學約束模型;
20、所述弧形板被懸浮式液壓桿放置完成后,基于剛體靜力學原理,建立多個懸浮式液壓桿與弧形板間的支撐靜力學模型。
21、運動學約束模型將描述在液壓桿驅動下,弧形板如何從初始狀態過渡到目標位置的動態運動規律,包括但不限于速度、加速度以及角速度等運動參數隨時間的變化關系,并考慮液壓桿伸縮過程中對其施加力的作用效果。
22、支撐靜力學模型將反映在最終放置狀態下,各個液壓桿對弧形板提供的支持力和力矩平衡情況,確保弧形板能夠穩定保持在指定位置,不發生傾斜或滑動。同時,該模型會考慮到液壓桿受力分布、彈性變形、接觸非線性等因素,以全面模擬實際工程應用中的復雜情況。
23、進一步的,所述懸浮式液壓桿伸縮的步驟是:
24、計算每根懸浮式液壓桿與弧形板的最優接觸角度和對應長度變化規律,將計算結果傳輸控制每根懸浮式液壓桿實現對應的伸縮運動。
25、進一步的,所述懸浮式液壓桿保持穩定長度的步驟是:
26、應用有限元算法計算最終平衡狀態下的懸浮式液壓桿穩定長度值,并控制每個懸浮式液壓桿保持對應的長度。
27、進一步的,所述液壓提升系統高度由信息模塊通過電腦控制自動調節高度;所述懸浮式液壓桿每兩個為一組共設置4組,所述懸浮式液壓桿外部設有保護罩,所述懸浮式液壓桿固定在所述裝置框架上;
28、所述懸浮式液壓桿內側設有攝像頭,所述攝像頭用于自動測距并將數據通過信號傳輸線纜發送到電腦,所述電腦內有偏差分析模塊,所述偏差分析模塊用于形成弧形板偏差分析。
29、進一步的,所述裝置框架均通過螺栓連接,所述裝置框架中設置對稱吊耳,所述裝置框架中間部分設有對稱的鎖緊機構,所述鎖緊機構為插入式,用于鎖緊弧形板。
30、本發明的第二方面提供一種計算機可讀存儲介質,其中,所述計算機可讀存儲介質內存儲有程序指令,所述程序指令運行時,用于上述的一種弧形板胎具的曲率弧度自適應調整方法。
31、本發明的第三方面提供一種弧形板胎具的曲率弧度自適應調整系統,其中,包括上述的計算機可讀存儲介質。
32、與現有技術相比較,本發明提供的一種弧形板胎具的曲率弧度自適應調整方法、介質及系統的有益效果是:
33、1.通過主動視覺感知與三維建模,實時獲取弧形板的空間姿態信息,可精確判斷液壓桿運動規律;
34、2.基于剛體運動分析,準確描述弧形板在液壓桿推動下的位姿變化,為控制提供依據;
35、3.通過有限元計算,獲得弧形板與多個液壓桿的支撐和平衡狀態,從而主動優化和控制液壓桿參數。
36、上述效果可有效提高弧形板在復雜胎具上的適應性裝配質量與效率,大幅降低試裝次數,提升自動化水平。
技術特征:
1.一種弧形板胎具的曲率弧度自適應調整方法,用于調整弧形板胎具的曲率弧度,所述弧形板胎具包括弧形板(5)底部的液壓提升系統,所述液壓提升系統由懸浮式液壓桿(3)組成,所述懸浮式液壓桿(3)下部設有裝置框架(6),所述裝置框架(6)中間部位設有鎖緊裝置,所述裝置框架(6)內部可布置信號傳輸線纜,所述懸浮式液壓桿(3)上部設有滑輪(2);
2.根據權利要求1所述的一種弧形板胎具的曲率弧度自適應調整方法,其特征在于,所述s10的步驟,采用圖像處理與三維重建相結合的方法:
3.根據權利要求2所述的一種弧形板胎具的曲率弧度自適應調整方法,其特征在于,所述s20的步驟是:使用高速攝像頭在弧形板(5)底面與任一懸浮式液壓桿(3)初次接觸時獲取圖像,作為第一圖像。
4.根據權利要求3所述的一種弧形板胎具的曲率弧度自適應調整方法,其特征在于,所述建立弧形板(5)放置過程的運動方程和支撐方程的步驟,采用計算機視覺識別與剛體運動學模型相結合的方法:
5.根據權利要求4所述的一種弧形板胎具的曲率弧度自適應調整方法,其特征在于,所述懸浮式液壓桿(3)伸縮的步驟是:
6.根據權利要求5所述的一種弧形板胎具的曲率弧度自適應調整方法,其特征在于,所述懸浮式液壓桿(3)保持穩定長度的步驟是:
7.根據權利要求6所述的一種弧形板胎具的曲率弧度自適應調整方法,其特征在于,所述液壓提升系統高度由信息模塊通過電腦控制自動調節高度;所述懸浮式液壓桿(3)每兩個為一組共設置4組,所述懸浮式液壓桿(3)外部設有保護罩(1),所述懸浮式液壓桿(3)固定在所述裝置框架(6)上;
8.根據權利要求7所述的一種弧形板胎具的曲率弧度自適應調整方法,其特征在于,所述裝置框架(6)均通過螺栓連接,所述裝置框架(6)中設置對稱吊耳,所述裝置框架(6)中間部分設有對稱的鎖緊機構(8),所述鎖緊機構(8)為插入式,用于鎖緊弧形板(5)。
9.一種計算機可讀存儲介質,其特征在于,所述計算機可讀存儲介質內存儲有程序指令,所述程序指令運行時,用于執行權利要求1-8任一項所述的一種弧形板胎具的曲率弧度自適應調整方法。
10.一種弧形板胎具的曲率弧度自適應調整系統,其特征在于,包括權利要求9所述的計算機可讀存儲介質。
技術總結
本發明提供了一種弧形板胎具的曲率弧度自適應調整方法、介質及系統,該弧形板胎具的曲率弧度自適應調整方法、介質及系統包括弧形板底部的液壓提升系統,方法包括以下步驟:根據弧形板的圖像,建立弧形板三維模型;獲取弧形板底面與弧形板胎具的任意一根懸浮式液壓桿抵接時的圖像;根據弧形板三維模型,識別第一圖像中的弧形板,并建立運動方程以及支撐方程;根據運動方程,計算每根懸浮式液壓桿的最優抵接角度,以及最優長度變化,輸出并控制對應懸浮式液壓桿伸縮操作;根據支撐方程,計算每根懸浮式液壓桿的穩定長度,輸出并控制對應懸浮式液壓桿伸縮操作,解決弧形構件裝配過程中的難題,提升裝配質量與效率。
技術研發人員:孫慧珍,李道明,秦健,劉杰,李翊,高洪遠
受保護的技術使用者:中建安裝集團黃河建設有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!