基于雙目視覺的機器人控制方法、裝置、設備及存儲介質與流程
本發明涉及機器人,尤其涉及一種基于雙目視覺的機器人控制方法、裝置、設備及存儲介質。
背景技術:
1、基于雙目視覺的機器人可以模仿人類的視覺系統,利用兩個相機從不同的視角捕捉操控任務相關物體的圖像以確認其的三維空間位置,進而基于相應三維空間位置執行操控任務,在精確抓取和導航等方面顯示出了巨大的潛力。但是現有技術中基于雙目視覺的機器人控制方法控制下的機器人,在面臨工作環境變化較大、場景深度變化較大和物體快速移動時,由于獲取的操控任務相關物體的立體視覺深度的精確性較差,使得機器人對操控目標物體進行操控的有效性和準確性還有待提高。
技術實現思路
1、本發明實施例提供一種基于雙目視覺的機器人控制方法、裝置、設備及存儲介質,能夠精確地獲取機器人操控任務相關物體的立體視覺深度,提高機器人基于操控任務相關物體的立體視覺深度對操控目標物體進行操控的有效性和準確性。
2、第一方面,本發明實施例提供一種基于雙目視覺的機器人控制方法,包括:
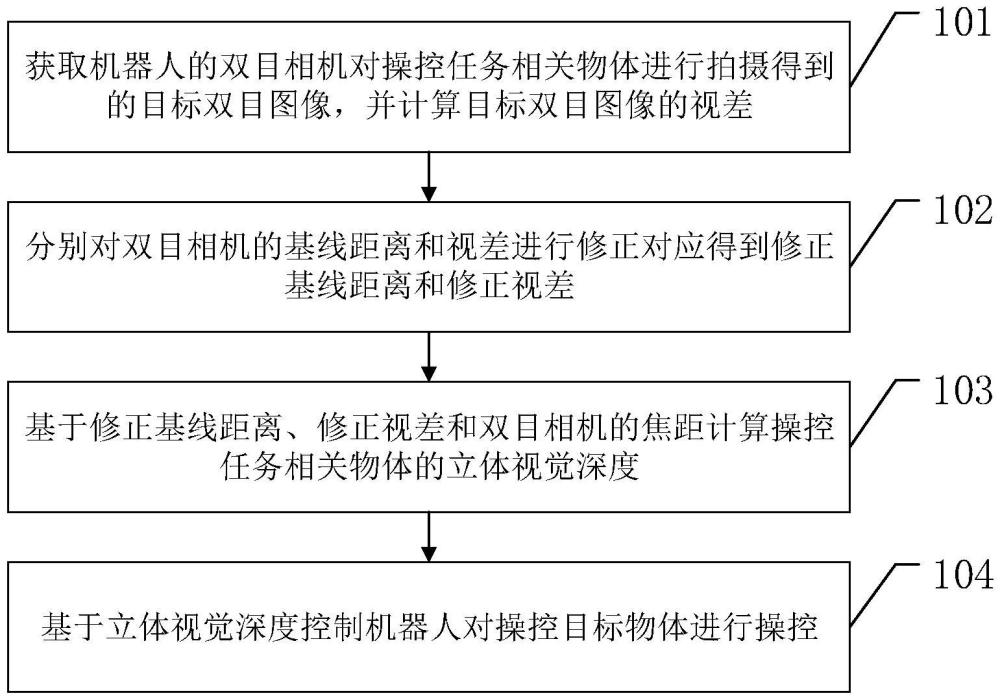
3、獲取機器人的雙目相機對操控任務相關物體進行拍攝得到的目標雙目圖像,并計算所述目標雙目圖像的視差;
4、分別對所述雙目相機的基線距離和所述視差進行修正對應得到修正基線距離和修正視差;
5、基于所述修正基線距離、所述修正視差和所述雙目相機的焦距計算所述操控任務相關物體的立體視覺深度;以及
6、基于所述立體視覺深度控制所述機器人對操控目標物體進行操控。
7、第二方面,本發明實施例提供一種基于雙目視覺的機器人控制裝置,包括:
8、視差獲取模塊,用于獲取機器人的雙目相機對操控任務相關物體進行拍攝得到的目標雙目圖像,并計算所述目標雙目圖像的視差;
9、基線距離和視差修正模塊,用于分別對所述雙目相機的基線距離和所述視差進行修正對應得到修正基線距離和修正視差;
10、立體視覺深度計算模塊,用于基于所述修正基線距離、所述修正視差和所述雙目相機的焦距計算所述操控任務相關物體的立體視覺深度;以及
11、操控模塊,用于基于所述立體視覺深度控制所述機器人對操控目標物體進行操控。
12、第三方面,本發明實施例還提供了一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,所述處理器執行所述程序時實現如本發明實施例中任一所述的基于雙目視覺的機器人控制方法。
13、第四方面,本發明實施例還提供了一種計算機可讀存儲介質,其上存儲有計算機程序,該程序被處理器執行時實現如本發明實施例中任一所述的基于雙目視覺的機器人控制方法。
14、本發明實施例提供的一種基于雙目視覺的機器人控制方法、裝置、電子設備和存儲介質,中,通過獲取機器人的操控任務相關物體對應的視差,并對機器人的雙目相機的基線距離和視差進行修正,之后進一步基于修正后的基線距離和視差計算操控任務相關物體的立體視覺深度,能夠減小由于機器人面臨工作環境變化較大、場景深度變化較大以及物體快速移動時計算立體視覺深度的誤差,進而精確地獲取機器人操控任務相關物體的立體視覺深度,以基于精確的操控任務相關物體的立體視覺深度對操控目標進行操控,提高機器人對操控目標物體進行操控的有效性和準確性。
技術特征:
1.一種基于雙目視覺的機器人控制方法,其特征在于,包括:
2.根據權利要求1所述的基于雙目視覺的機器人控制方法,其特征在于,還包括:在所述基于所述修正基線距離、所述修正視差和所述雙目相機的焦距計算所述操控任務相關物體的立體視覺深度之前,
3.根據權利要求2所述的基于雙目視覺的機器人控制方法,其特征在于,還包括:在所述基于所述修正基線距離、所述修正視差、所述雙目相機的焦距和所述圖像梯度差異項計算所述操控任務相關物體的所述立體視覺深度之前,
4.根據權利要求1所述的基于雙目視覺的機器人控制方法,其特征在于,所述對所述視差進行修正得到修正視差,包括:
5.根據權利要求1所述的基于雙目視覺的機器人控制方法,其特征在于,所述對所述視差進行修正得到修正視差,包括:
6.根據權利要求3所述的基于雙目視覺的機器人控制方法,其特征在于,所述基于所述修正基線距離、所述修正視差、所述雙目相機的焦距、所述圖像梯度差異項和所述立體幾何一致性項計算所述操控任務相關物體的所述立體視覺深度,包括:
7.根據權利要求1所述的基于雙目視覺的機器人控制方法,其特征在于,還包括:在所述分別對所述雙目相機的基線距離和所述視差進行修正對應得到修正基線距離和修正視差之前,
8.一種基于雙目視覺的機器人控制裝置,其特征在于,包括:
9.一種電子設備,包括存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,其特征在于,所述處理器執行所述程序時實現如權利要求1至7中任一所述的基于雙目視覺的機器人控制方法。
10.一種計算機可讀存儲介質,其上存儲有計算機程序,其特征在于,該程序被處理器執行時實現如權利要求1至7中任一所述的基于雙目視覺的機器人控制方法。
技術總結
本發明實施例公開一種基于雙目視覺的機器人控制方法、裝置、設備及存儲介質,該方法包括:獲取機器人的雙目相機對操控任務相關物體進行拍攝得到的目標雙目圖像,并計算目標雙目圖像的視差;分別對雙目相機的基線距離和視差進行修正對應得到修正基線距離和修正視差;基于修正基線距離、修正視差和雙目相機的焦距計算操控任務相關物體的立體視覺深度;以及基于立體視覺深度控制機器人對操控目標物體進行操控。本發明實施例能夠精確地獲取機器人操控任務相關物體的立體視覺深度,提高機器人基于操控任務相關物體的立體視覺深度對操控目標物體進行操控的有效性和準確性。
技術研發人員:豆朋,吳添權,肖勇,詹樺,邱宇航,謝偉宏,張杰雄,張湃
受保護的技術使用者:廣東電網有限責任公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!